

10.3. Ультразвуковые датчики расстояний для мехатронных модулей движения автомобиля.
В активных системах безопасности автомобилей используются различные датчики, предупреждающие водителя и реагирующие: на засыпание водителя, на близкие объекты, находящиеся спереди и сзади, на предупреждения столкновений, на присутствие пешеходов в ночное время, на правильность парковки и.т.д. Учитывая, что при этом полностью не задействованы возможности центрального компьютера автомобиля, можно на переднем бампере автомобиля установить два ультразвуковых датчика, отвечающих за плавность хода автомобиля и непосредственно считывающих информацию о качестве дороги. Общая схема такой системы воздействия на амортизаторы нами разработана и запатентована.Для проведения бесконтактных измерений можно разработать активный датчик, который бы мог одновременно и передавать эталонный сигнал, и принимать отраженный от объекта сигнал. Передаваться энергия может в виде любого излучения — например, через электромагнитные волны оптического или микроволнового диапазонов, через акустические волны и т.д. Принцип передачи и приема ультразвуковой энергии лежит в основе очень популярных ультразвуковых датчиков и детекторов скорости. Ультразвуковые волны являются механическими акустическими волнами, частота которых лежит за пределами слышимости человеческого уха — более 20 кГц.
При столкновении любых волн с объектом часть их энергии отражается. В случае ультразвуковых волн отраженная энергия рассеивается в пространстве. Это означает, что вне зависимости от направления падающего луча, все отраженные лучи почти равномерно распределяются внутри широкого пространственного угла, который может достигать значения 180°. При движении объекта частота отраженных волн не совпадает с частотой излучаемых волн. Это и есть так называемый эффект Доплера. Этот эффект характерен для волн любой природы, в том числе и ультразвуковых
Расстояние L0 до объекта можно определить по скорости ультразвуковых волн υ в данной среде и углу θ (рис.10.4.А ):
![]() ,
м
,
м
где t — время, за которое ультразвуковая волна распространяется от излучателя до объекта и назад к приемнику. Если излучатель и приемник расположены недалеко друг от друга по сравнению с расстоянием до объекта, cos θ ≈ l. Очевидное преимущество ультразвуковых волн над волнами микроволнового диапазона заключается в том, что они распространяются со скоростями, которые намного меньше скорости света, характерной для СВЧ-волн. Поэтому интервал t для них гораздо длиннее, что упрощает его измерение, и, следовательно, снижает стоимость устройств.
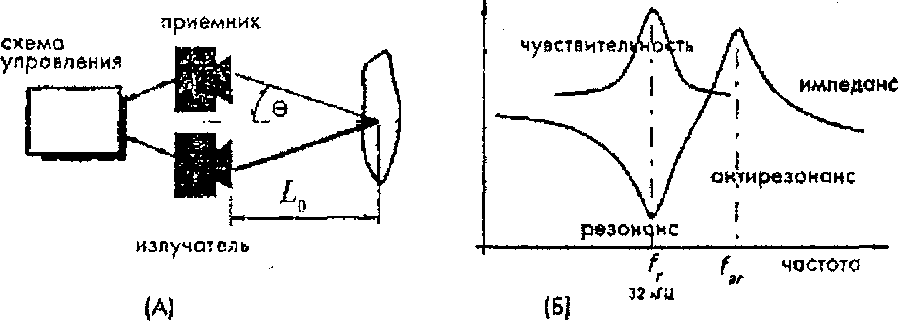
А – принципиальная схема, Б - характеристика пьезоэлектрического преобразователя
Рис.10.4. Ультразвуковые датчики расстояний
Для генерации любых механических волн, включая ультразвуковые, требуется организовать обратно поступательное движение поверхности, при котором создаются зоны разряжения и сжатия рабочей среды: газовой (воздушной), жидкостной или твердой.
Для возбуждения ультразвуковых волн чаще всего применяются пьезоэлектрические преобразователи, работающие в так называемом моторном режиме. Это название указывает на то, что в данном режиме пьезоэлектрические устройства напрямую преобразуют электрическую энергию в механическую.
На рис.10.5 А показано, что входное напряжение, приложенное к пьезокерамическому элементу заставляет его изгибаться, возбуждая тем самым ультразвуковые волны. Поскольку пьезоэлектричество является обратимым эффектом, воздействие ультразвуковых волн на тот же керамический элемент приводит к появлению на его поверхности электрических зарядов. Другими словами, элемент может работать и как излучатель, и как приемник (микрофон). Типичная рабочая частота излучающего пьезоэлемента составляет около 32 кГц. Для повышения эффективности частота задающего генератора должна быть равна резонансной частоте fr керамического элемента (рис.10.5Б). При соблюдении этого условия удается реализовать лучшую чувствительность и эффективность элемента. При работе схемы в импульсном режиме для передачи и приема сигнала можно использовать один и тот же пьезопреобразователь. При непрерывном режиме работы необходимы два пьезоэлемента. - входное напряжение приводит к изгибу элемента, что вызывает генерацию ультразвуковых волн. И наоборот, в результате воздействия волн на выходе преобразователя появляется напряжение.. Часто на практике важно знать диаграмму направленности датчика. Чем уже диаграмма, тем выше чувствительность преобразователя.
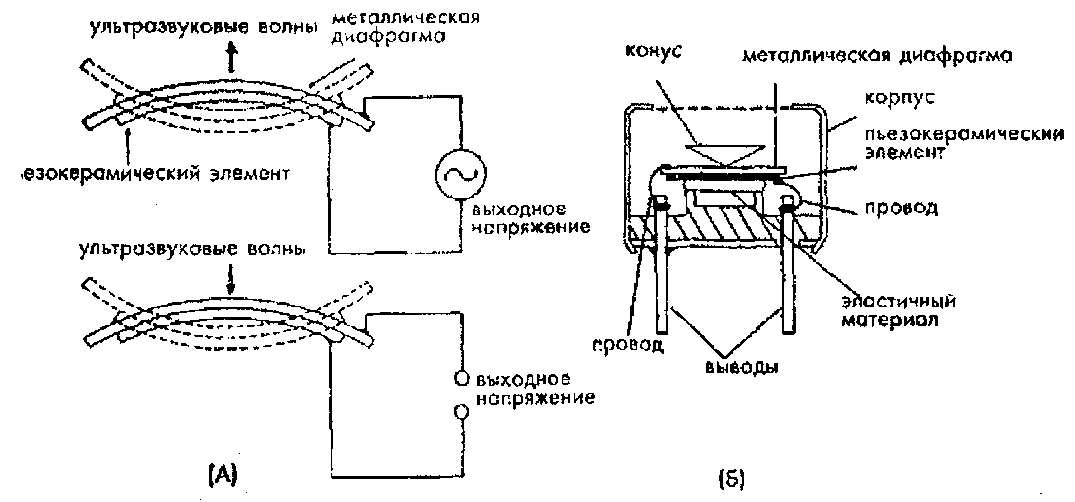
А – схема генерации ультразвуковых волн ; Б – конструкция ультразвукового преобразователя.
Рис.10.5. Пьезоэлектрический ультразвуковой преобразователь