

8.2. Мехатронный робот-станок "рост 300"
Мехатронный робот-станок предназначен для финишной обработки: пера лопаток газовых и паровых турбин, энергетических станций и установок, газотурбинных двигателей, лопастей водяных турбин, гребных винтов различного назначения. Схема станка представлена на рис. 8.3. Создание этой мехатронной машины вызвано необходимостью стабилизации геометрических параметров и качества поверхности лопаток, определяющих вибрационные и шумовые характеристики турбоагрегатов, а также автоматизировать тяжелые и вредные для здоровья человека технологические операции.
Машина имеет нелинейную компоновку, отличием которой является отсутствие традиционных прямолинейных направляющих. Все формообразующие движения реализуются мехатронными модулями вращательного типа. Мехатронные модули построены на базе высокомоментных двигателей серии ТМА швейцарской фирмы ETEL S.A., которые встроены в конструкцию машины. Станок оснащен
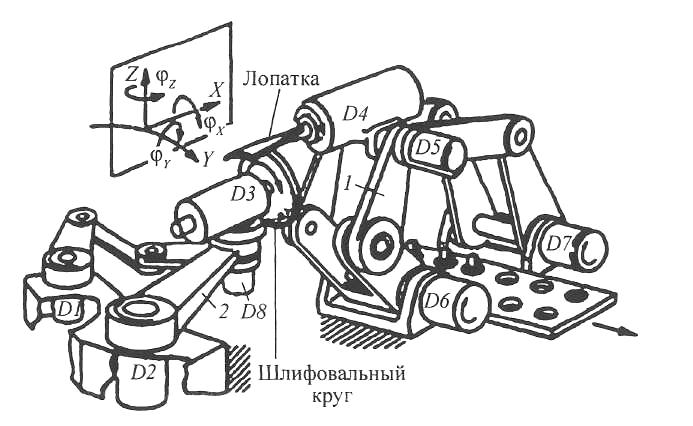
Рис.8.3. Схема робота-станка "РОСТ 300" (ИМАШ РАН)
"Indramat DIAX04" и устройством числового программного управления серии PA8000NT фирмы Power Automation AG. Оптико-электронная измерительная система позволяет осуществлять контроль обрабатываемой поверхности заготовки с целью привязки к базовым поверхностям станка и задания оптимальных режимов обработки.
Технические характеристики робота-станка "РОСТ 300"
Число одновременно управляемых координат ………………………………6
Масса машины, кг …………………………………………..2500
Максимальные размеры обрабатываемого изделия, мм ………………….150 х 40 х 80
Диаметр шлифовального круга, мм ………………………………………… 30...80
Точность контурной обработки, мм…………………………………………… 0,025
Пределы рабочих подач по осям, мин -1............................................................. 120.. .2000
Скорость быстрого перемещения, мм/мин…………………………………….. 24 000
Скорость вращения шлифовального электрошпинделя, мин-1…………. 6000...24000
Наряду с очевидными преимуществами опыт внедрения машин с параллельной и гибридной кинематикой в реальное производство выявил ряд актуальных научно-технических проблем. К ним в первую очередь следует отнести следующие вопросы:
сложность системной интеграции, необходимость дополнительного времени для анализа и поиска неисправностей;
большая трудоемкость обслуживания и программирования машины по сравнению с традиционным оборудованием;
сложность и неотработанность процедуры калибровки машины;
необходимость знаний как в области станков с ЧПУ, так и промышленных роботов для обучения персонала методике программирования;
неоднородность (анизотропия) характеристик машины в различных областях рабочей зоны, наличие особых конфигураций.
На эффективность решения эти задач, поставленных практикой производственного применения, необходимо обратить особое внимание при создании машин нового поколения.
9. Управление движением мехатронных систем на основе Интернет технологий
Дистанционное управление мехатронными объектами с использованием Интернета подразумевает не только сбор данных при помощи информационно-измерительной аппаратуры, но и подачу управляющих воздействий на исполнительные элементы различных типов.
Интернет технологии являются эффективным и удобным средством организации дистанционного управления техническими объектами, преимуществами которого являются:
- возможность организовать дистанционное управление реальными объектами и экспериментами из любой точки мира;
- возможность организации доступа широкого круга специалистов-экспертов, территориально удаленных друг от друга, к уникальному оборудованию в режиме реального времени.
Для правильного подхода к решению проблем использования Интернета для управления необходимо знать параметры временной задержки и вероятность потери пакетов данных, т.е. необходимо сформировать модель сегмента Интернета (табл. 9.1)
В зависимости от местонахождения оператора может меняться трассировка маршрута к серверу работа, содержащая различное число промежуточных серверов с неопределенными временами переходов к разной степени загрузки этих серверов.
Роботехническая система с мехатронным управлением по глобальной сети должна удовлетворять ряду основных практических требований:
- влияние изменения загруженности сети на работу оператора и качество его взаимодействия с роботом должно быть сведено к минимуму;
-для улучшения взаимодействия оператора с роботом web-сервер должен обеспечивать «дружелюбный» человеко-машинный интерфейс.
Таблица 9.1
Средняя задержка при передаче данных по Интернету
Хост |
Расстояние, км |
Среднее значение задержки, мс |
Средне- квадратическое отклонение |
Потери пакетов данных, % |
Локальная сеть |
0,05 |
0,998 |
0,715 |
0 |
тот же домен |
30 |
8,10 |
5,35 |
0,08 |
Другой город |
150 |
17,20 |
9,74 |
0,80 |
Другой континент |
10000 |
326,3 |
27,20 |
41,4 |
Для уменьшения влияния загруженности сети на работу оператора необходимо уделить достаточное внимание оптимизации объема передаваемой по сети информации.
Обобщенная схема системы управления мобильным роботом по глобальной сети представлена на рис. 9.1

Рис. 9.1. Обобщенная схема системы дистанционного управления мобильным роботом по сети Интернет.
В этой схеме можно организовать эффективное управление мобильными роботами в различных условиях внешней среды с использованием коммуникационного ресурса Интернета и удобным пользовательским web-интерфейсом.
Преобразователь информации выполняет функцию преобразования унифицированных команд верхнего уровня управления, поступающих от человеко-машинного интерфейса системы, в команды для тактического уровня управления.
Информационная система навигации мобильного робота выполняет функцию сбора и обработки данных с датчиков пройденного пути, скорости и ускорения, датчиков наличия препятствий и т.п. Обработка этих данных позволяет выдавать информацию о текущем положении и скорости движения робота, наличии препятствий, расстоянии до них и т.п. Значения этих навигационных переменных используются системой управления тактического уровня, а также позволяет сформировать модель робота и окружающей среды для отображения параметров системы на мониторе оператора.
Бортовая система управления уровня должна обладать высокой степенью интеллектуальности на тактическом уровне.
Устройства согласования и ввода-вывода сигналов обеспечивают работу системы на исполнительном уровне управления. Они осуществляют усиление сигналов, сбор данных, выдачу управляющих воздействий на приводы робота.
Основными функциональными блоками web-интерфейса являются интерфейсы управления движением, отображения параметров системы и передачи видеоизображения.
Интерфейс управления движением представляет возможность оператору подавать такие унифицированные команды верхнего уровня с помощью нажатия кнопки на экране монитора, как разрешение на начало движения, остановку, поворот, изменение скорости.
Для реализации взаимодействия клиент-сервер важно, какой метод запроса использует клиентская часть при обращении к web-серверу. В общем случае запрос – это сообщение, посылаемое клиентом серверу. Метод POST используется для запроса серверу, чтобы тот принял информацию, включенную в запрос, как относящуюся к ресурсу, указанному идентификатором ресурса. Метод GET используется для получения любой информации, идентифицированной идентификатором ресурса в запросе.
CGI определяет четыре информационных потока: переменные окружения, стандартный входной поток, стандартный выходной поток.
Для создания человеко-машинного интерфейса –клиентской части системы управления – необходимо создать документ, в котором реализован интерфейс с оператором. В языке HTML это возможно посредством форм. Оператору предоставляется возможность давать команду «старт/стоп», изменять скорость и направление движения робота. Текущие значения сигналов с датчиков отображаются в виде графиков, стрелочных и цифровых индикаторов на динамически обновляемой web-странице на мониторе оператора.
При этом обработка навигационных переменных, а также параметров текущего состояния робота осуществляется на управляющем компьютере в рамках работы управляющей программы независимо от оператора и временной задержки сети Интернет.