

Задача к-2. Составление уравнений движения точки и определение ее скорости и ускорения
ПРИМЕР 2.1
Для
точки М
заданного
механизма составить уравнения движения,
вычертить участок ее траектории и для
момента времени
![]() .
.
Найти скорость точки, полное, касательное и нормальное ускорения, а также радиус кривизны траектории в соответствующей точке.
Исходные
данные: схема механизма (рис. 4.4.1.1);
![]() рад;
r
=
20 см; R
= 100 см; t1=1/3
с [2].
рад;
r
=
20 см; R
= 100 см; t1=1/3
с [2].
Решение:
Из
условия ![]() P
=
P
= ![]() P
имеем:
P
имеем:
![]() ;
;
![]() .
.
При
t=1/3
с
![]() ,
,
![]() .
.
Уравнения движения точки М (рис. 2.2):
![]()
![]() ;
;
![]()
и ли
окончательно:
ли
окончательно:
![]() (2.1)
(2.1)
Эти уравнения являются параметрическими уравнениями траектории точки - эпициклоиды. Проекции скорости точки на оси координат:
![]() см/с;
см/с;
![]() см/с.
см/с.
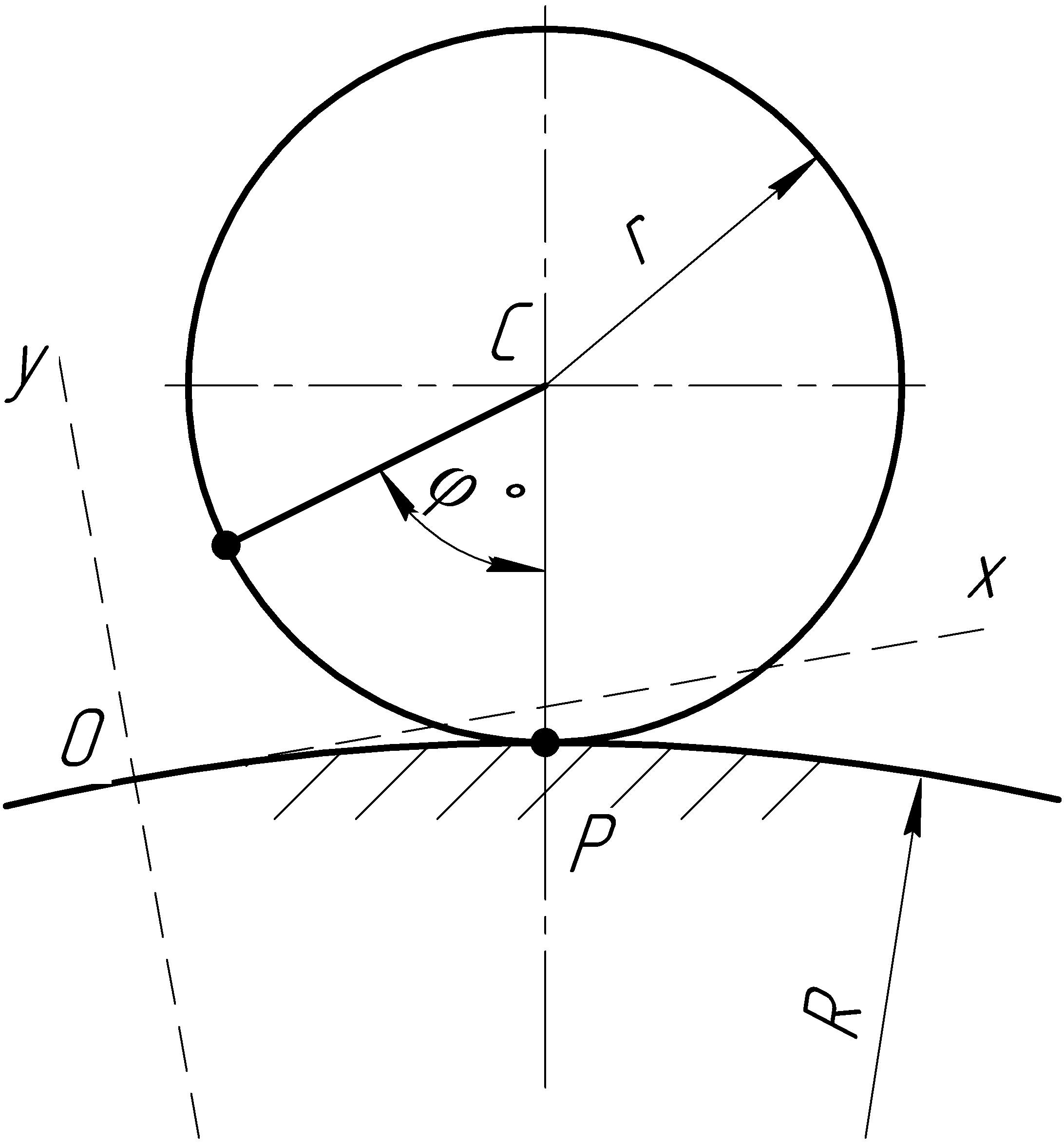
Рис. 2.1
Модуль скорости:
![]()
или окончательно
![]() см/с
. (2.2)
см/с
. (2.2)
Проекция ускорения точки на оси координат
![]() ;
;
![]() .
.
Модуль ускорения
![]()
или
![]() см/с2.
см/с2.
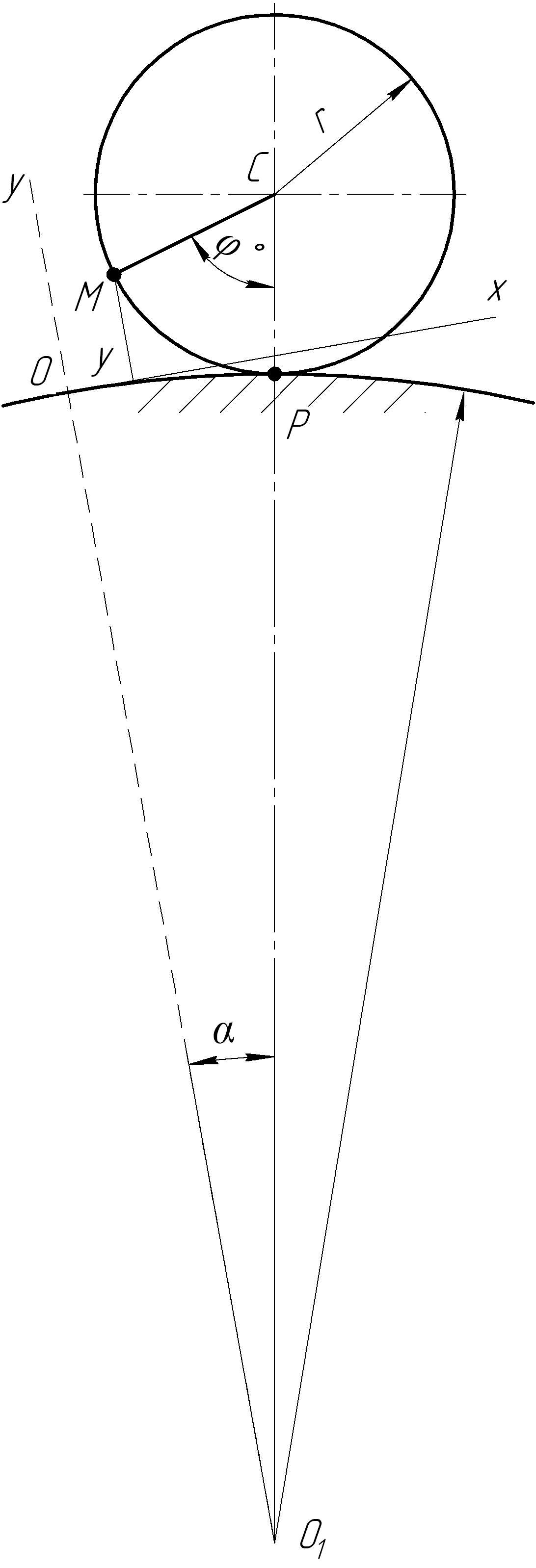
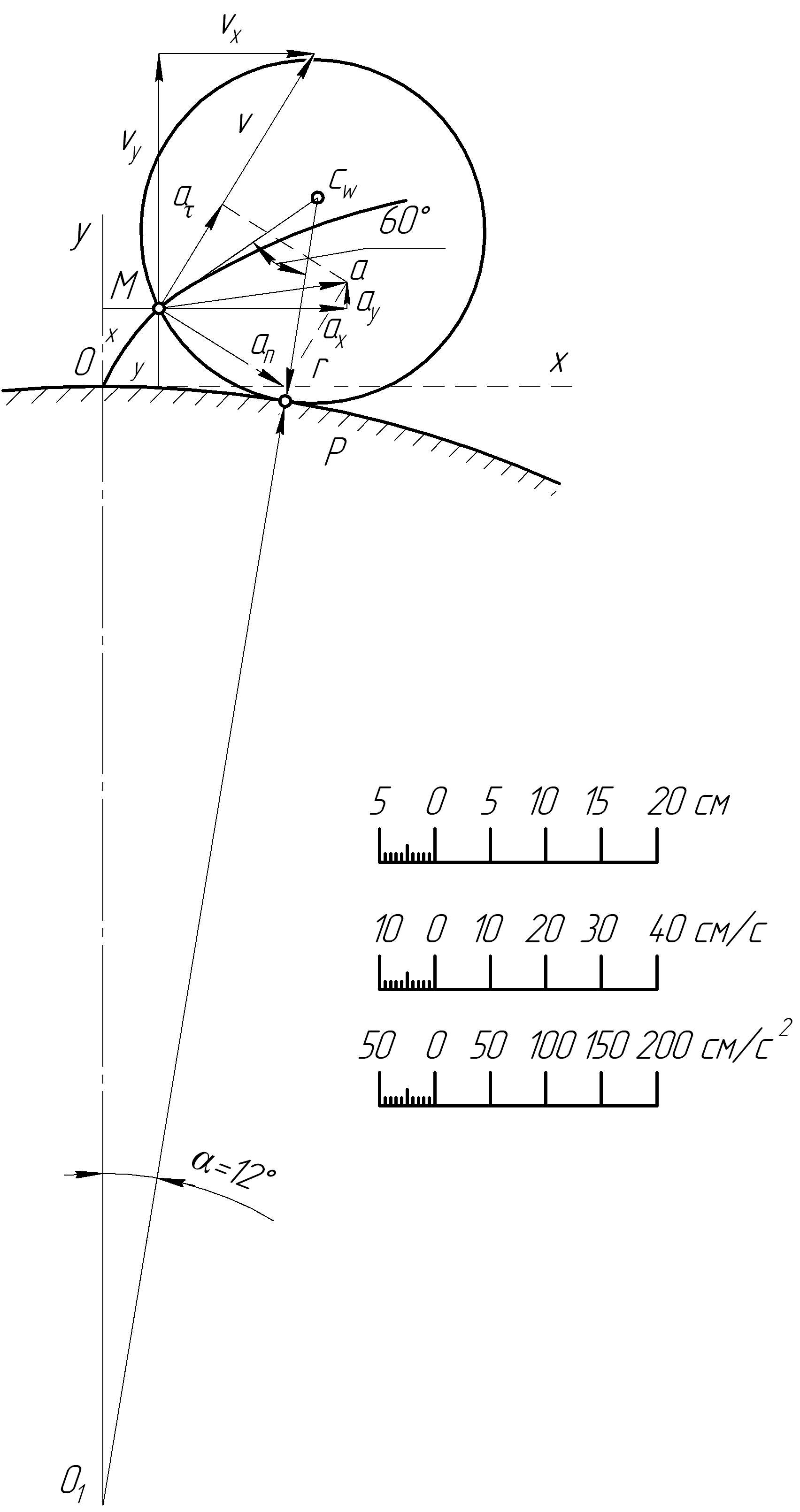
Рис.2.2. Рис.2.3.
Так как в данном примере для модуля скорости точки получено простое выражение, то модуль касательного ускорения находим не по формуле
![]() см/с2,
см/с2,
а непосредственным дифференцированием выражения (2.2):
![]()
или
![]() см/с2.
см/с2.
Модули скорости и ускорения точки, их проекции на оси координат, а также касательное и нормальное ускорения, вычисленные для заданного момента времени t=1/3 с, приведены в таблице 2.1.
Таблица 2.1
Скорость м/с |
Ускорение м/с2 |
Радиус кривизны см |
||||||
|
|
|
|
|
|
|
|
|
30,4 |
56,0 |
75,4 |
260 |
41 |
263 |
204 |
166 |
34,3 |
Нормальное ускорение точки:
![]() см/c2.
см/c2.
Радиус кривизны:
![]() см.
см.
Значения
![]() и
и
![]() также приведены в таблице 2.1.
также приведены в таблице 2.1.
На рис.2.3 показан участок траектории точки М, построенный по уравнениям (2.1), а также ее скорость, ускорение и все их составляющие. Таким образом, как и при выполнении задания К-1, осуществляется графическая проверка правильности вычислений.
ПРИМЕР 2.2
Определить
вид траектории движения точки, найти
ее положение при
![]() ,
а также определить ее скорость, нормальное,
тангенциальное, и полное ускорение
точки, если
,
а также определить ее скорость, нормальное,
тангенциальное, и полное ускорение
точки, если
![]()
Решение:
Определим вид траектории в координатной форме, исключив переменную из уравнений координат, найдем зависимость:
![]()
![]()
Траекторией движения точки является парабола, ветви которой вытянуты вдоль оси ОХ, вершина в О (-3,0) (рис.2.2.1).
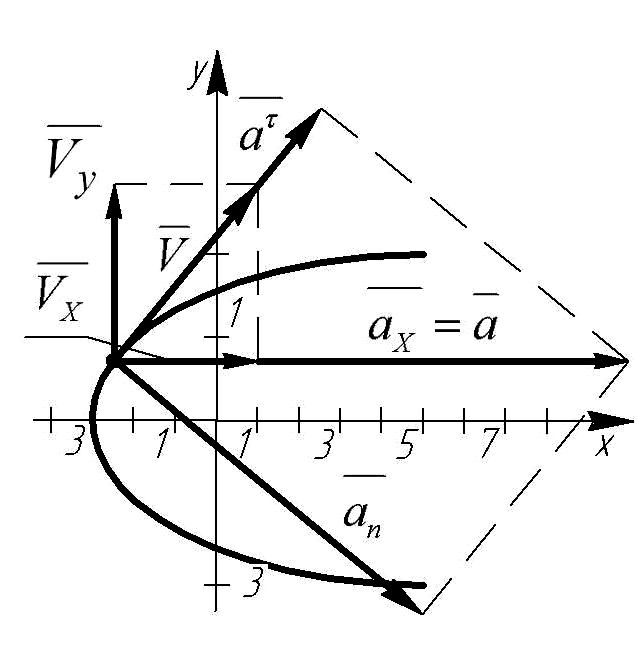
Рис.2.2.1
Определяем
координаты точки М при
![]() ,
для этого в уравнение движения подставляем
,
для этого в уравнение движения подставляем
![]() :
:
![]()
покажем точку М на траектории.
Определяем скорость точки:
Определяем полное ускорение точки.
Определяем тангенциальное, нормальное ускорение точки, а также радиус кривизны окружности:
![]()
Нормальное ускорение:
![]()
Радиус кривизны траектории:
![]()
Покажем
на рисунке 4.4.4 скорости
![]() ,
,![]() ,
,
,
,![]() ,
,![]() и
и
![]() точки М.
точки М.
II КИНЕМАТИКА ТВЕРДОГО ТЕЛА
ПОСТУПАТЕЛЬНОЕ И ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ
ТВЕРДОГО ТЕЛА.
Задача К-3.
Определение скоростей и ускорений точектвердого тела при поступательном и вращательном движении.
ПРИМЕР 3.1
Ведущий
шкив I
изображенного на чертеже механизма
лебедки (рис. 5.1.1.1) начинает вращаться
равноускоренно из состояния покоя и за
первые 5 секунд совершает 50 оборотов.
Определить скорость и ускорение груза
D
а также точки В,
расположенной на поверхности барабана
через I
секунду
после начала движения. Радиусы шкивов
1 и 2 и барабана соответственно равны:
![]() см,
см,
![]() см,
см,
![]() см
[4].
см
[4].
Число
зубьев колес 3 и 4 равны
![]() ,
,
![]() .
Шкив 2 неизменно соединён с колесом 3, а
колесо 4 - с барабаном 5.
.
Шкив 2 неизменно соединён с колесом 3, а
колесо 4 - с барабаном 5.
Решение:
Ведущий
шкив 1 совершает равнопеременное
вращение, уравнение которого имеет вид:
![]() .
.
где:
![]() - угол поворота шкива 1 в радианах.
- угол поворота шкива 1 в радианах.
![]() -
начальный угол поворота шкива 1
-
начальный угол поворота шкива 1
![]() -
начальная угловая скорость шкива 1
-
начальная угловая скорость шкива 1
![]() -
угловое ускорение шкива 1
-
угловое ускорение шкива 1
По
условию
![]() ,
,
![]() .
.
Угол
поворота шкива 1 задан в полных оборотах
и равен N1=50
оборотов. В радианах
![]() .
.
После
подстановки
значений
![]() уравнение вращения шкива 1 примет вид:
уравнение вращения шкива 1 примет вид:
![]() .
Отсюда находим угловое ускорение шкива
.
Отсюда находим угловое ускорение шкива
![]() сек-2.
сек-2.
Угловая
скорость шкива 1 определяется уравнением
![]() .
.
Отсюда,
учитывая, что
![]() и
и
![]() сек-2
получаем
сек-2
получаем
![]() .
.
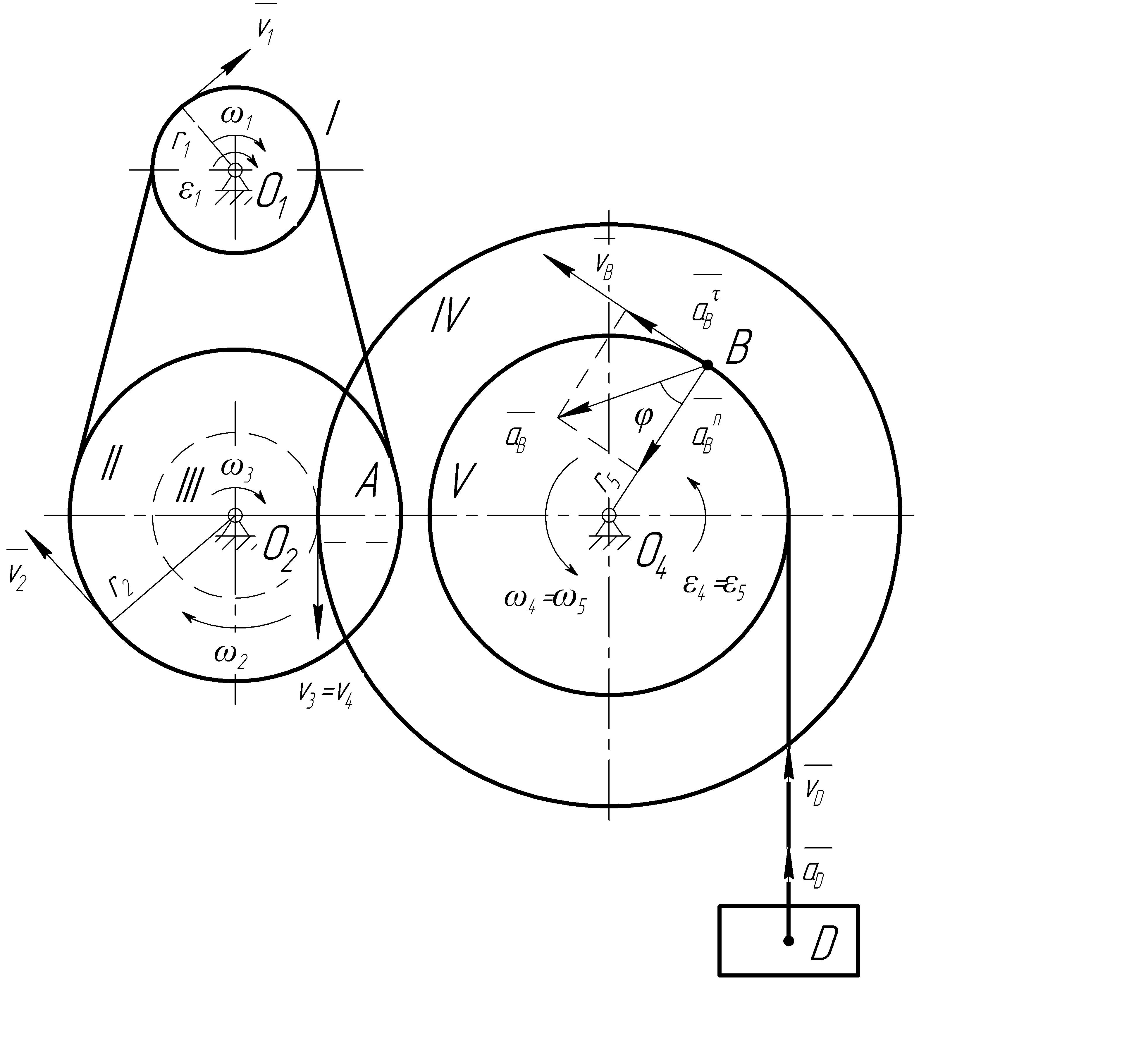
Рис.3.1.1
Для
определения угловой скорости шкива 2
воспользуемся равенством окружных
скоростей на ободах первого и второго
шкивов, т.е.
![]() ,
с другой стороны
,
с другой стороны
![]() и
и
![]() ,
поэтому
,
поэтому
![]() .
Отсюда
.
Отсюда
![]() .
.
Так
как колесо 3 неизменно связанно со шкивом
2, то его угловая скорость
![]() равна угловой скорости
равна угловой скорости
![]() шкива 2, т.е.
шкива 2, т.е.
![]() .
.
Обозначим
радиусы начальных окружностей зубчатых
колёс 3 и 4 соответственно буквами
![]() и
и
![]() .
.
Для
определения угловой скорости колеса 4
воспользуемся тем, что начальные
окружности колёс 3 и 4 находящиеся в
зацеплении, катятся друг по другу без
скольжения и следовательно в точке
зацепления линейная скорость
![]() точки А,
принадлежащей колесу 3, равна линейной
скорости
точки А,
принадлежащей колесу 3, равна линейной
скорости
![]() точки А,
принадлежащей колесу 4.
точки А,
принадлежащей колесу 4.
Следовательно
![]() .
Отсюда, с учётом равенств
.
Отсюда, с учётом равенств
![]() ,
,
![]() получаем:
получаем:
![]() ,
,
![]() .
.
Радиусы
начальных окружностей пропорциональны
числам зубьев, поэтому
![]() и
и
![]() сек-1.
сек-1.
Угловое
ускорение
![]() колеса 4 найдём как производную по
времени от его угловой скорости:
колеса 4 найдём как производную по
времени от его угловой скорости:
![]() сек-2.
сек-2.
Т.к.
барабан 5 неизменно связан с колесом 4,
то его угловая скорость
![]() и угловое ускорение
и угловое ускорение
![]() равны соответственно угловой скорости
равны соответственно угловой скорости
![]() и угловому ускорению
колеса 4.
и угловому ускорению
колеса 4.
![]() сек-1,
сек-1,
![]() сек-1.
сек-1.
В момент t1=1 сек, угловая скорость и угловое ускорение барабана 5 будут:
![]() ,
,
![]() .
.
Скорость и полное ускорение точки B, расположенной на поверхности барабана в момент t1=1сек, найдём по формулам:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Направление
полного ускорения определяем углом
![]() между ускорением и радиусом вращения
точки В:
между ускорением и радиусом вращения
точки В:
![]() .
.
В связи с отсутствием проскальзывания каната по поверхности барабана скорость и ускорение груза D будут соответственно равны скорости и касательному ускорению точки B, т.е:
![]() см/сек2,
см/сек2,
![]() .
.
ПРИМЕР 3.2
Механизм состоит из ступенчатых колес 1-3, находящихся в зацеплении или связаны ременной передачей, груз 4 и 5 и стрелки 6, жестко связанной с колесом 3. радиусы колес равно соответственно: 1- r1=2 см, R1=4 см, у колеса 2- r2=6 см, R2=8 см, у колеса 3- r3=12 см, R3=16 см, длина стрелки l=24 см (рис. 3.2.1). Закон изменения скорости груза 5 : υ5=2(t2-3) см/с2, положительное направление которой вниз.
Найти скорости точек А и С, угловое ускорение колеса 3 и ускорение точек B и D и груза 4 в момент t1=2 с.
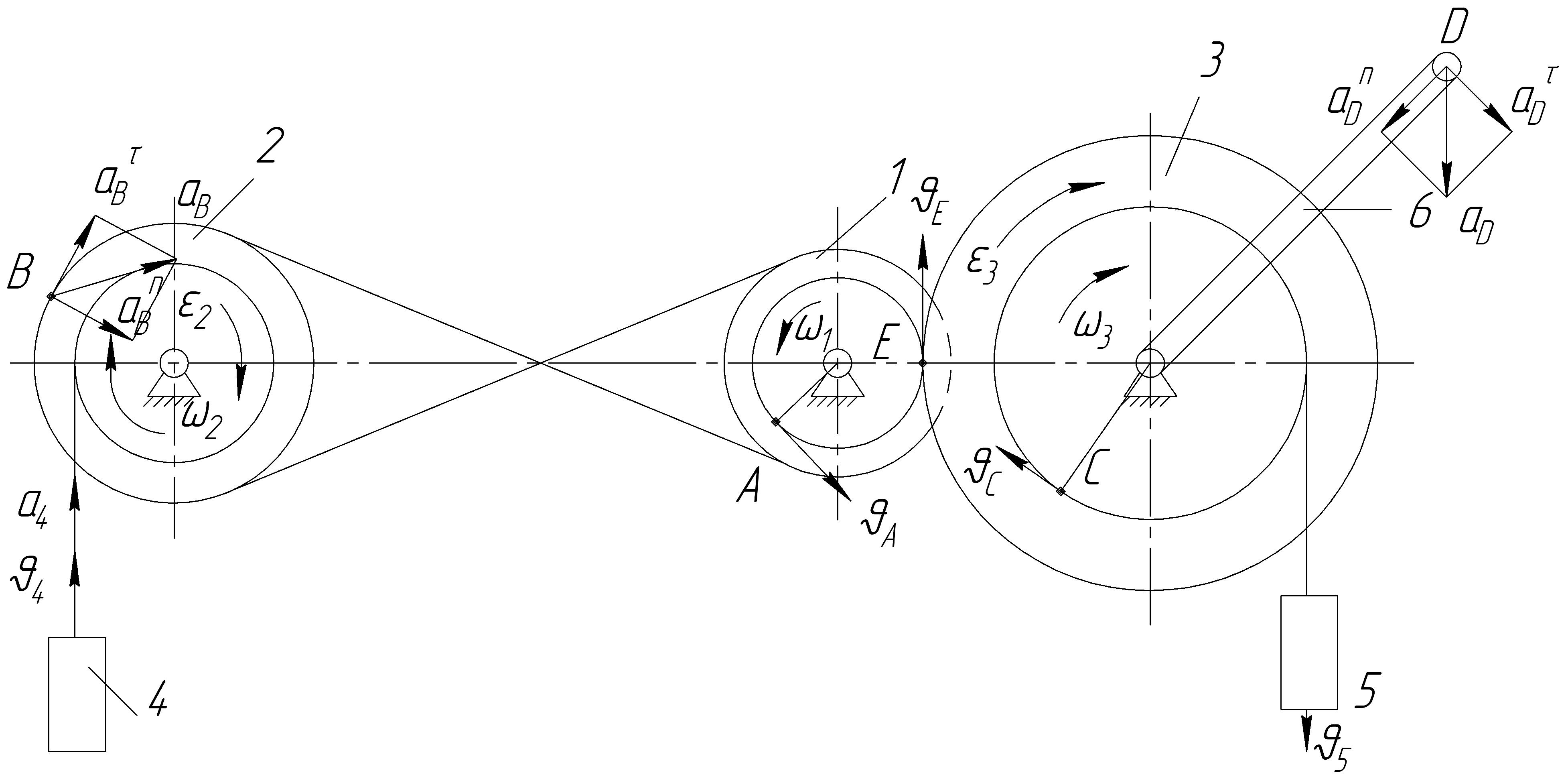
Рис.3.2.1
Решение:
Определим
угловые скорости колес, как функции
времени t.
Зная υ5,
находим угловую скорость 3-го колеса
![]()
Так
как колесо 3 и 1 находятся в зацеплении,
то скорость точки Е зацепления этих
колес одинакова, поэтому
![]() ,
откуда
,
откуда
![]()
Колесо
1 находится в зацеплении с колесом 2,
поэтому
![]() ,
откуда
,
откуда
![]()
Направления угловых скоростей всех тел показаны на рис. 3.2.1
Определение
углового ускорения 3-го тела ε3.
По известной угловой скорости ω3;
![]() и при t1=2
c.
ε3
=0,67с-2.
и при t1=2
c.
ε3
=0,67с-2.
Определение скорости точки А. по известной угловой скорости 1-го колеса:
![]() ,
при t1=2
c.
,
при t1=2
c.
![]() см/с.
см/с.
Определение
скорости точки С.
Так как точка С
принадлежит колесу 3, то при t1=2
c;
![]() см/с.
см/с.
Направление скоростей точек А и С показаны на рисунке в соответствии с направлениями угловых скоростей.
Определение
ускорения точки В.
Предварительно находим угловое ускорение
2-го тела
![]() ,
при t1=2
c.
ε2=2,67с-2.
,
при t1=2
c.
ε2=2,67с-2.
Ускорение
точки В,
![]() причем
причем
![]()
![]() при t1=2
c.
при t1=2
c.
![]() см/с2,
см/с2,
![]() см/с2
см/с2
![]() см/с2.
см/с2.
Направление
![]() показаны на рисунке 3.2.1
показаны на рисунке 3.2.1
Определение ускорения точки D. При t1=2 c ε3 =0,67с-2 , ω3=0,17с-1.
Находим
![]() при
t1=2
c
при
t1=2
c
![]() ,
,
![]() см/с2,
см/с2,
![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Направление
![]() показаны
на рисунке 3.2.1
показаны
на рисунке 3.2.1
Определение ускорения тела 4. сначала находим скорость этого тела
![]()
Так
как груз 4 движется поступательно, то
центр этого груза движется прямолинейно,
а поэтому
![]() ,при
t1=2,
,при
t1=2,
![]() ,
,
![]() т.к.
т.к.
![]() .
.
Замечание.
Ускорение тела 4 можно найти как
касательное ускорение точки обода
колеса радиусом
r2
т.е.
![]() см/с2.
см/с2.