

Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Муромский институт (филиал)
государственного образовательного учреждения
высшего профессионального образования
«Владимирский государственный университет»
Н.А. Лазуткина
Теоретическая механика
Раздел «Динамика»
Учебно-методическое пособие для проведения
программного контроля знаний студентов дневной и заочной форм обучения специальностей
151001.65 «Технология машиностроения»,
151003.65 «Инструментальные системы
машиностроительных производств»,
150900.62 «Технология, оборудование и автоматизация
машиностроительных производств»
Муром
2009
УДК 621.01 (075.8)
ББК 22.21+22.213
Л 17
Рецензент:
Кандидат технических наук, профессор кафедры «Технология машиностроения» МИ (филиала) ВлГУ
А.Н. Швецов
Печатается по решению редакционно-издательского совета
Муромского института (филиала)
Владимирского государственного университета
Л 17 Лазуткина, Н.А. Теоретическая механика. Раздел «Динамика»: учебно-метод. пособие для проведения программного контроля знаний студентов дневной и заочной форм обучения специальностей 151001.65 «Технология машиностроения», 151003.65 «Инструментальные системы машиностроительных производств», 150900.62 «Технология, оборудование и автоматизация машиностроительных производств» / Н.А. Лазут- кина. – Муром: Изд.-полиграфический центр МИ ВлГУ, 2009. – 112 с.: 14 ил. – Библиогр.: 5 назв.
ISBN 978-5-8439-0199-8
УДК 621.01 (075.8)
ББК 22.21+22.213
Учебное пособие написано в соответствии с утвержденными рабочими программами по курсу теоретическая механика и предназначено для проведения программного контроля знаний по дисциплине студентами технических специальностей.
Методическая разработка является дополнением к существующей литературе по курсу и улучшает методику освоения дисциплины.
ISBN 978-5-8439-0199-8
Лазуткина Н.А., 2009
Муромский институт (филиал)
государственного образовательного учреждения высшего профессионального образования
«Владимирский государственный университет», 2009
Введение
Законы и теоремы, лежащие в основе теоретической механики находят весьма разнообразное и обширное применение, поэтому у студентов, изучающих данный курс, наибольшее затруднение вызывает приложение общих положений теории к решению конкретных задач.
Данная методическая разработка ставит своей целью научить методам решения задач динамики.
Методическая разработка включают задания и методику решения типовых задач по разделу теоретической механики «Динамика» и включает следующие темы:
динамика точки;
колебание точки;
теорема о движении центра масс;
теорема об изменении количества движения;
теорема об изменении кинетического момента системы;
теорема об изменении кинетической энергии системы;
общее уравнение динамики;
определение динамических реакций подшипников;
уравнение Лагранжа второго рода.
Методическая разработка предназначена для подготовки студентов к проведению программного контроля знаний и является дополнением к существующей литературе по дисциплине «Теоретическая механика», поскольку улучшает ее методическое обучение и соответствует рабочим программам курсов всех форм обучения и рекомендуется к изданию через РИО МИ ВлГУ.
1 Примеры выполнения заданий
Пример 1.
Тело
падает в сопротивляющейся среде с высоты
![]() под действием силы тяжести
под действием силы тяжести
![]() и силы сопротивления
и силы сопротивления
![]() ,
пропорциональной квадрату скорости (
,
пропорциональной квадрату скорости (![]() - постоянный коэффициент). С какой
скоростью тело упадет на землю, если
его начальная скорость
- постоянный коэффициент). С какой
скоростью тело упадет на землю, если
его начальная скорость
![]() ?
?
Решение.
На
схеме (рис. 1) показаны начальное (![]() )
и текущее (
)
и текущее (![]() )
положение тела. Для начального положения
тела показан вектор начальной скорости
)
положение тела. Для начального положения
тела показан вектор начальной скорости
![]() ,
для текущего – приложенные силы.
Дифференциальное уравнение движения:
,
для текущего – приложенные силы.
Дифференциальное уравнение движения:
Рис. 1![]()

Так как
![]() ,
,
то дифференциальное уравнение движения можно переписать в виде
![]() .
.
Но
![]() .
.
Поэтому:
![]() ;
;
или
![]() .
.
Это
уравнение является линейным относительно
![]() .
Если обозначить
.
Если обозначить
![]() ,
,
![]() ,
,
![]() ,
его можно привести к виду
,
его можно привести к виду
![]() .
.
Общее решение этого уравнения:
![]() ,
,
где
![]() - произвольная постоянная.
- произвольная постоянная.
Возвращаясь к исходным обозначениям, имеем:
![]() .
.
Начальное
условие: при
![]() ,
,
![]() .
Поэтому:
.
Поэтому:
![]() ,
,
![]() .
.
Следовательно:
![]() .
.
Следовательно,
при
![]() :
:
 .
.
ПРИМЕР 2.
Лодка
массой
![]() плавает в стоячей воде. На задней скамейке
лодки, находящейся в покое, сидели два
человека. Один из них, массой
плавает в стоячей воде. На задней скамейке
лодки, находящейся в покое, сидели два
человека. Один из них, массой
![]() ,
перешел на нос лодки, пройдя по ней
расстояние
,
перешел на нос лодки, пройдя по ней
расстояние
![]() ,
другой, массой
,
другой, массой
![]() ,
переместился на среднюю скамейку на
расстояние
,
переместился на среднюю скамейку на
расстояние
![]() .
На какое расстояние переместится при
этом лодка?
.
На какое расстояние переместится при
этом лодка?
При решении задачи людей считать материальными точками, сопротивлением воды пренебречь.
Решение.
Н
Рис. 2
![]() ,
,
![]() ,
,
![]() и выталкивающая сила воды
и выталкивающая сила воды
![]() .
Все внешние силы направлены по вертикали,
их проекции на неподвижную горизонтальную
ось Ох равны нулю. Поэтому дифференциальное
уравнение движения центра масс С системы
в проекциях на ось Ох будет:
.
Все внешние силы направлены по вертикали,
их проекции на неподвижную горизонтальную
ось Ох равны нулю. Поэтому дифференциальное
уравнение движения центра масс С системы
в проекциях на ось Ох будет:
![]() ,
,
или
![]() .
Отсюда, интегрируя, находим
.
Отсюда, интегрируя, находим
![]() .
Значение постоянной интегрирования
определяется из начального условия:
при
.
Значение постоянной интегрирования
определяется из начального условия:
при
![]()
![]() (так как вся система в начальный момент
неподвижна). Тогда
(так как вся система в начальный момент
неподвижна). Тогда
![]() и
.
Интегрируя еще раз, получаем
и
.
Интегрируя еще раз, получаем
![]() (
(![]() - координата центра масс системы при
).
- координата центра масс системы при
).
По определению координата центра масс механической системы определяется выражением:
![]() .
.
Поэтому
из равенства
![]() следует
следует
![]() или
или
![]() ,
или окончательно
,
или окончательно
![]() ,
где
,
где
![]() есть приращение координаты центра
тяжести
есть приращение координаты центра
тяжести
![]() -го
тела, входящего в систему, или, что то
же, проекция его перемещения на ось Х.
-го
тела, входящего в систему, или, что то
же, проекция его перемещения на ось Х.
В
нашем случае абсолютные перемещения
пассажиров
![]() и
и
![]() складываются из переносного перемещения
вместе с лодкой
складываются из переносного перемещения
вместе с лодкой
![]() и относительных по отношению лодки:
и относительных по отношению лодки:
![]() ,
,
![]() .
.
Поэтому:
![]() .
.
Отсюда:
![]() .
.
Знак минус означает, что лодка перемещается против Х.
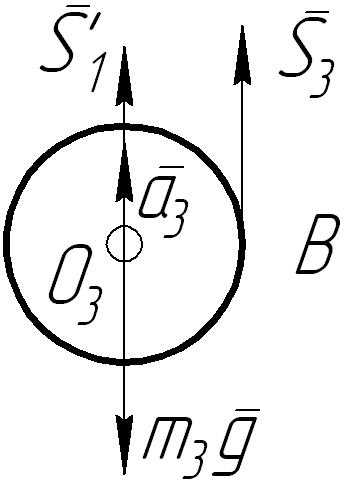
ПРИМЕР 3.
Г
Рис. 3
![]() кг
может вращаться без трения вокруг
неподвижной вертикальной оси
кг
может вращаться без трения вокруг
неподвижной вертикальной оси
![]() ,
проходящей через точку Е
(рис. 3). На пластине имеется прямоугольный
желоб АД,
по которому может двигаться без трения
груз массой
,
проходящей через точку Е
(рис. 3). На пластине имеется прямоугольный
желоб АД,
по которому может двигаться без трения
груз массой
![]() кг.
кг.
В
начальный момент пластина и груз
неподвижны, и груз находится в точке А,
затем груз начинает двигаться по пластине
под действием внутренних сил по закону
![]() ,
м.
,
м.
Определить
угловую скорость
![]() пластины как функцию времени и найти
ее значение в момент, когда груз окажется
в точке Д.
пластины как функцию времени и найти
ее значение в момент, когда груз окажется
в точке Д.
Решение.
На
схеме показаны внешние силы, действующие
на систему пластина – груз: силы тяжести
,
и реакции
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() подшипника
подшипника
![]() и подшипника
и подшипника
![]() .
Моменты каждой из этих сил относительно
оси
равны нулю. Поэтому по теореме об
изменении кинетического момента
.
Моменты каждой из этих сил относительно
оси
равны нулю. Поэтому по теореме об
изменении кинетического момента
![]() .
Отсюда
.
Отсюда
![]() .
Постоянная интегрирования
.
Постоянная интегрирования
![]() ,
так как в начальный момент система
неподвижна. Следовательно
,
так как в начальный момент система
неподвижна. Следовательно
![]() .
.
Так
как система состоит из двух тел –
пластины и груза, то ее кинетический
момент равен сумме кинетического момента
пластины
![]() и момента количества движения
и момента количества движения
![]() груза:
груза:
![]() .
Пластина вращается вокруг неподвижной
оси, поэтому
.
Пластина вращается вокруг неподвижной
оси, поэтому
![]() (
(![]() - проекция вектора угловой скорости
- проекция вектора угловой скорости
![]() на ось
на ось
![]() ).
).
Момент инерции пластины по теореме Штейнера:
![]() .
.
При
определении момента количества движения
груза учитываем, что его движение сложное
и абсолютная скорость
![]() равна геометрической сумме переносной
равна геометрической сумме переносной
![]() и относительной
и относительной
![]() скоростей.
скоростей.
По
теореме Вариньона момент вектора
относительно оси равен алгебраической
сумме моментов его составляющих, поэтому
момент количества движения груза равен
сумме моментов векторов
![]() и
и
![]() :
:
![]() .
.
Н
Рис. 4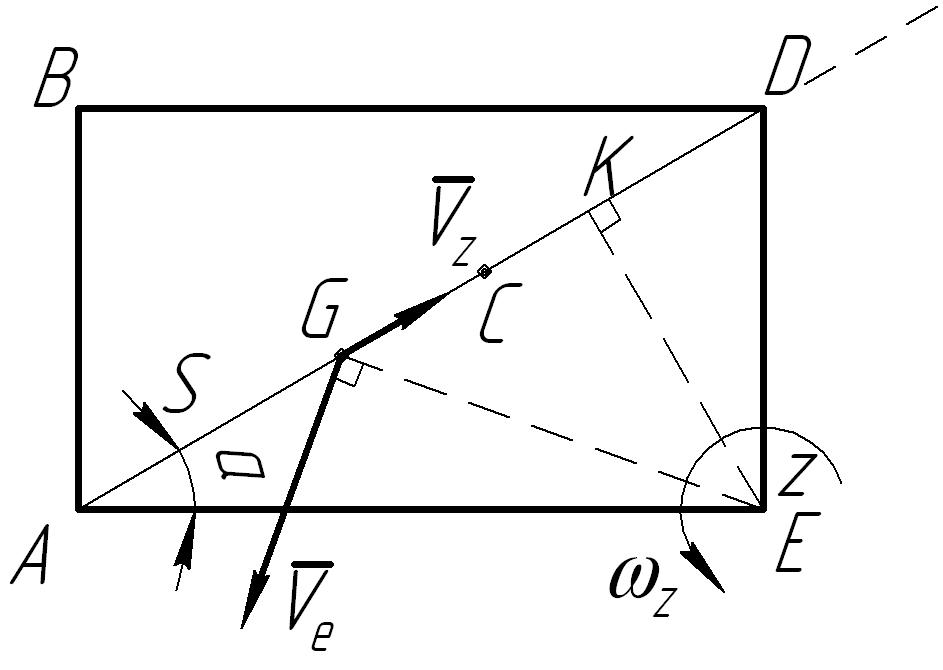
![]() направлен в положительную сторону оси
направлен в положительную сторону оси
![]() ,
что соответствует случаю, когда:
,
что соответствует случаю, когда:
![]() .
.
В
этом случае
![]() отрицателен (точка движется по отношению
к оси
по часовой стрелке). Если будет
отрицателен (точка движется по отношению
к оси
по часовой стрелке). Если будет
![]() (проекция
на ось
отрицательно), то направление
(проекция
на ось
отрицательно), то направление
![]() будет противоположным и
должен быть положительным. В обоих
случаях справедливо равенство
будет противоположным и
должен быть положительным. В обоих
случаях справедливо равенство
![]() .
.
Аналогично
направление вращения пластины и
переносной скорости
показаны на рис. 4 для случая, когда
![]() .
В этом случае
.
В этом случае
![]() и
и
![]() .
Если же будет
.
Если же будет
![]() ,
то вектор
будет направлен в противоположную
сторону и равен по модулю
,
то вектор
будет направлен в противоположную
сторону и равен по модулю
![]() ;
момент количества движения будет равен:
;
момент количества движения будет равен:
![]() .
.
Таким
образом, и для момента вектора
![]() в обоих случаях (
и
)
получили одинаковое выражение
в обоих случаях (
и
)
получили одинаковое выражение
![]() .
Следовательно, при любых знаках величин
.
Следовательно, при любых знаках величин
![]() и
момент количества движения груза:
и
момент количества движения груза:
![]() .
.
Вычислим
![]() и
и
![]() .
Из
.
Из
![]()
![]() .
Из
.
Из
![]()
![]() .
Следовательно,
.
Следовательно,
![]() .
Из
.
Из
![]() по теореме косинусов
по теореме косинусов
![]() .
Из
.
Из
![]() .
Поэтому
.
Поэтому
![]() .
.
Подставляя и в выражение для и прибавив к нему кинетический момент пластины, получим выражение для кинетического момента системы, который по доказанному ранее равен нулю:
![]() .
.
После подстановки числовых значений получаем:
![]() ,
,
откуда
![]() ,
,
или
![]() .
.
Чтобы
определить значение
в момент прихода груза в точку
![]() ,
замечаем, что в этот момент
,
замечаем, что в этот момент
![]() ,
или
,
или
![]() ;
откуда
;
откуда
![]() с.
При
с.
При
![]() с
получаем
с
получаем
![]() .
.
ПРИМЕР 4.
Рис. 5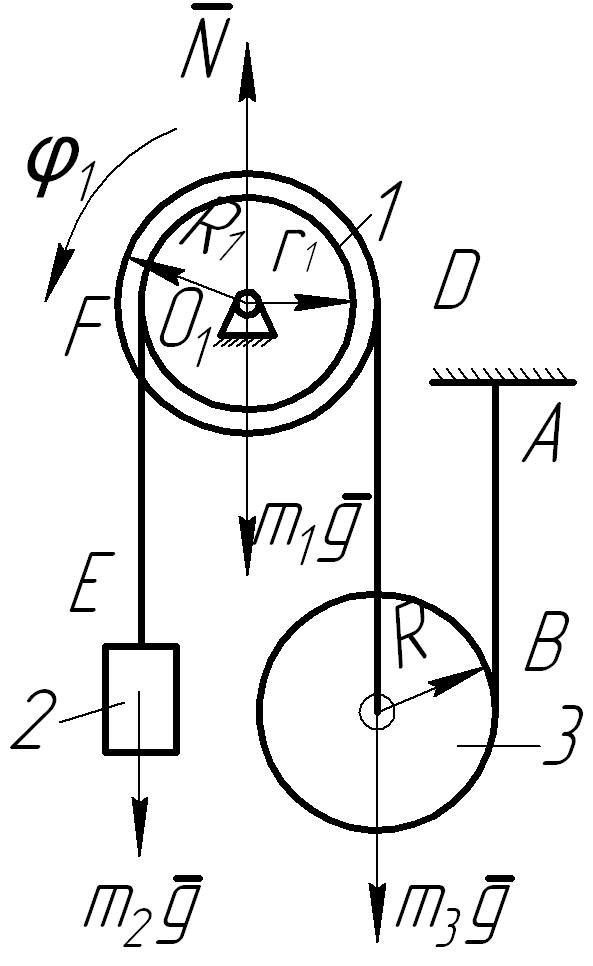
Ступенчатый
шкив 1, имеющий массу
и радиус инерции относительно оси
вращения
![]() ,
обмотан гибкими нерастяжимыми нитями.
К нити, сходящей со ступени радиуса
,
обмотан гибкими нерастяжимыми нитями.
К нити, сходящей со ступени радиуса
![]() прикреплен груз 2 массы
.
К нити, сходящей со ступени радиуса
прикреплен груз 2 массы
.
К нити, сходящей со ступени радиуса
![]() ,
шарнирно прикреплен цилиндр 3 в точке
,
шарнирно прикреплен цилиндр 3 в точке
![]() ,
лежащей на его оси. Этот цилиндр также
обмотан нитью, конец которой закреплен
в точке А.
Участки
,
лежащей на его оси. Этот цилиндр также
обмотан нитью, конец которой закреплен
в точке А.
Участки
![]() и
и
![]() параллельны. Радиус цилиндра равен
параллельны. Радиус цилиндра равен
![]() ,
а его масса -
и равномерно распределена по его объему.
Массы и радиусы удовлетворяют условию
,
а его масса -
и равномерно распределена по его объему.
Массы и радиусы удовлетворяют условию
![]() .
Пренебрегая трением в шарнирах, определить
угловую скорость
.
Пренебрегая трением в шарнирах, определить
угловую скорость
![]() ступенчатого шкива в функции угла
ступенчатого шкива в функции угла
![]() его поворота, его угловое ускорение
его поворота, его угловое ускорение
![]() ,
натяжения нитей
,
натяжения нитей
![]() ,
,
и реакцию оси
.
В начальный момент система неподвижна.
,
,
и реакцию оси
.
В начальный момент система неподвижна.
Решение.
Кинетическая энергия ступенчатого вала, вращающегося вокруг неподвижной оси:
![]() .
.
Кинетическая энергия груза 2, совершающего поступательное движение:
![]() .
.
Кинетическая энергия цилиндра, совершающего плоскопараллельное движение:
![]() .
.
Мгновенный центр скоростей сечения цилиндра плоскостью чертежа находится в точке В (так как скорость участка нити АВ равна нулю).
Поэтому
![]() .
Момент инерции цилиндра
.
Момент инерции цилиндра
![]() .
Подставив эти выражения в формулу для
.
Подставив эти выражения в формулу для
![]() ,
получим:
,
получим:
![]() .
.
Учитывая,
что
![]() ,
окончательно
,
окончательно
![]() .
.
Кинетическая энергия системы
![]() .
.
При
повороте ступенчатого шкива на угол
груз
опускается на величину
![]() ,
а ось цилиндра поднимается на
,
а ось цилиндра поднимается на
![]() .
Сумма работ сил тяжести:
.
Сумма работ сил тяжести:
![]() .
.
Другие силы, приложенные в данной системе, работы не совершают.
Так как в начальный момент система неподвижна, то по теореме об изменении кинетической энергии:
![]() .
.
Это равенство и определяет зависимость от .
Чтобы найти угловое ускорение шкива 1, дифференцируем левую и правую части этого равенства по времени:
![]() .
.
Так
как
![]() ,
,
![]() ,
то отсюда получаем:
,
то отсюда получаем:
 .
.
Ч
Рис. 6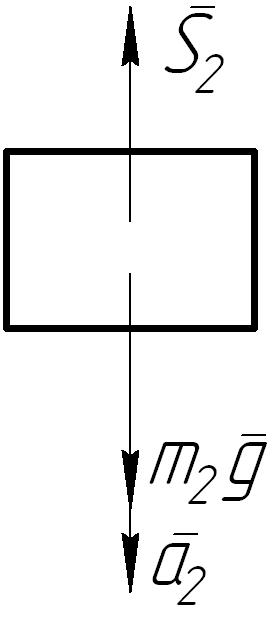
![]() нити
,
напишем уравнение второго закона Ньютона
для груза 2, к которому приложены силы
нити
,
напишем уравнение второго закона Ньютона
для груза 2, к которому приложены силы
![]() и
и
![]() (рис. 6):
(рис. 6):
![]() ,
,
где
![]() - ускорение груза.
- ускорение груза.
Отсюда
Рис. 7![]()
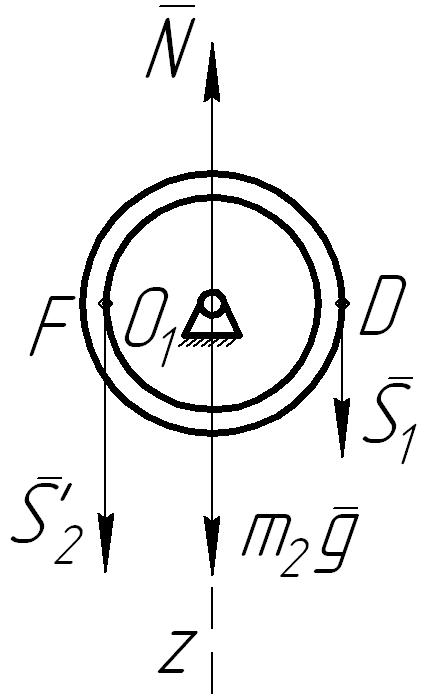
Для
определения натяжения
![]() нити
применим к ступенчатому шкиву
дифференциальное уравнение вращения
твердого тела вокруг неподвижной оси.
К шкиву приложены силы
нити
применим к ступенчатому шкиву
дифференциальное уравнение вращения
твердого тела вокруг неподвижной оси.
К шкиву приложены силы
![]() ,
,
,
,
![]() ,
,
![]() (рис. 7). Поэтому
(рис. 7). Поэтому
![]() .
.
Так
как
![]() ,
то отсюда
,
то отсюда
![]() .
.
Для
определения реакции
![]() применим к шкиву теорему о движении
центра масс:
применим к шкиву теорему о движении
центра масс:
![]() .
.
Так
как
![]() ,
то
,
то
Рис. 8![]()
Наконец,
для определения натяжения
![]() нити АВ
применим теорему о движении центра масс
к цилиндру 3, на который действуют внешние
силы
нити АВ
применим теорему о движении центра масс
к цилиндру 3, на который действуют внешние
силы
![]() ,
,
![]() ,
,
![]() (рис. 8):
(рис. 8):
![]() .
.
Так
как
![]() ,
то отсюда
,
то отсюда

Подставив
сюда выражение
,
получим
![]() .
.
ПРИМЕР 5.
П
Рис. 9
Рис. 10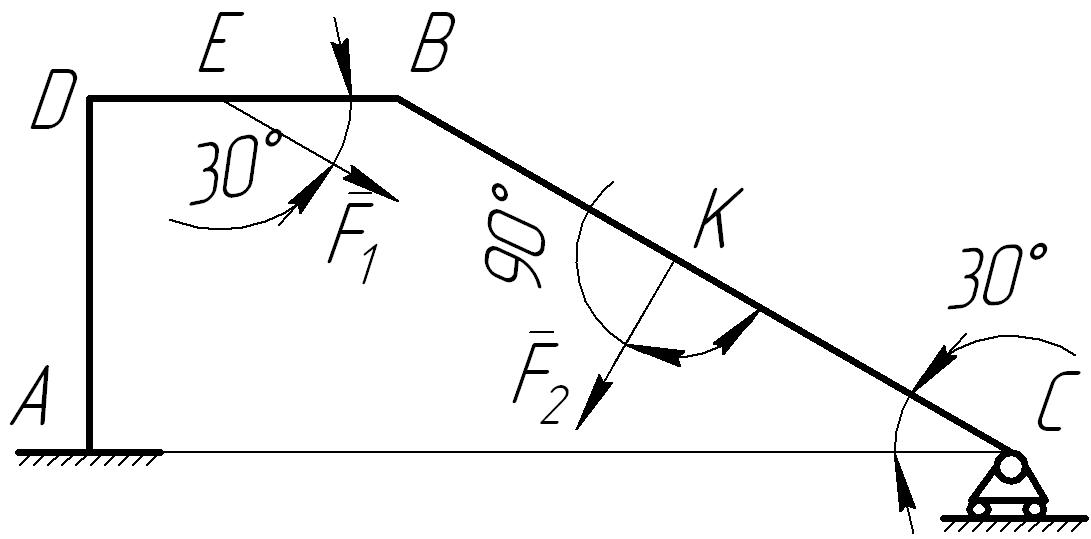
![]() .
.
![]() ,
,
![]() ,
,
![]() м,
м,
![]() кН,
кН,
![]() кН.
кН.
Решение.
Для
определения реактивного момента
![]() заменим заделку в точке А
шарнирно-неподвижной опорой, компенсировав
отброшенную связь ее реакцией –
реактивной парой сил с неизвестным
моментом
(рис. 10).
заменим заделку в точке А
шарнирно-неподвижной опорой, компенсировав
отброшенную связь ее реакцией –
реактивной парой сил с неизвестным
моментом
(рис. 10).
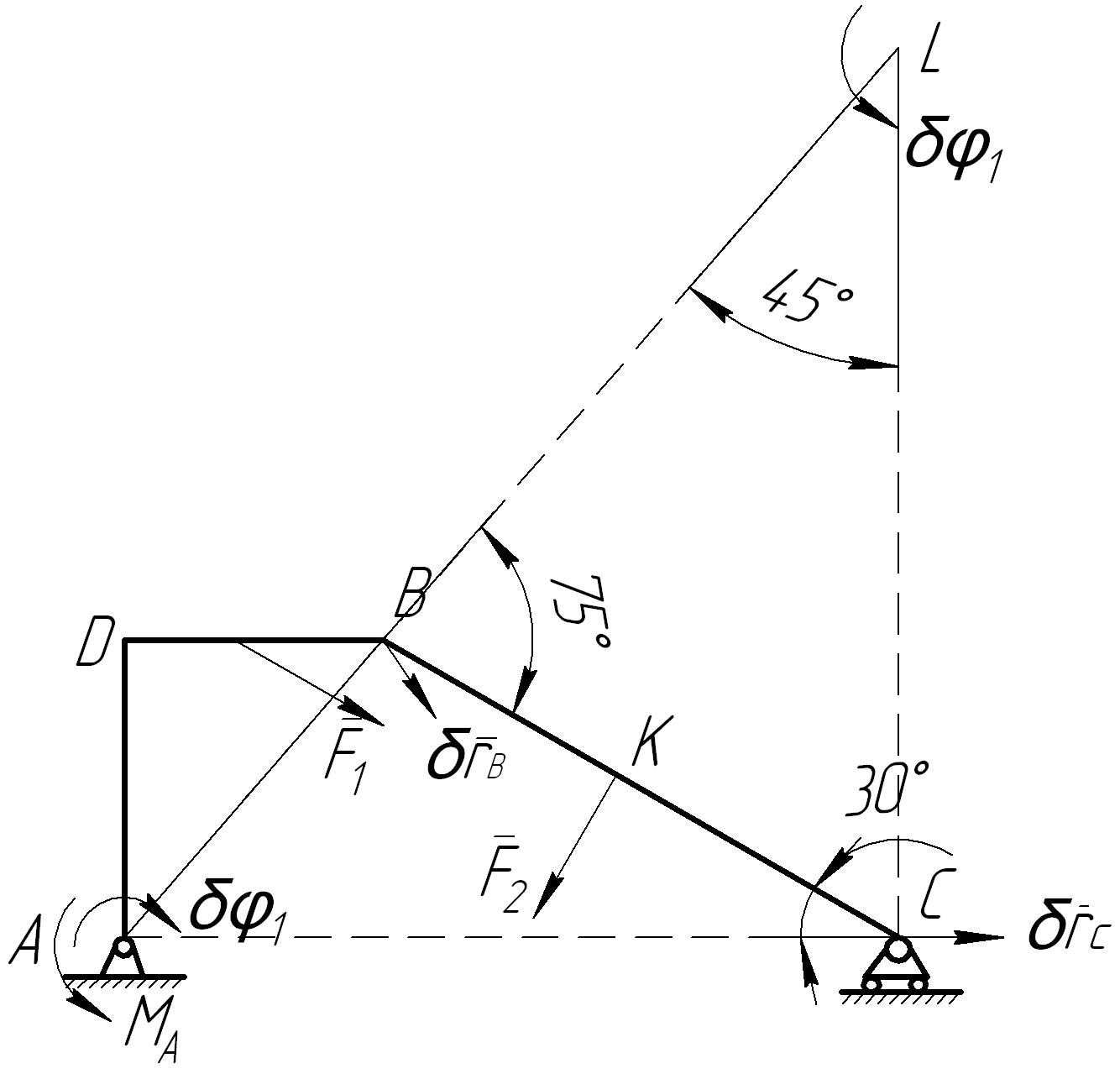
Получившейся
механической системе с одной степенью
свободы даем возможное перемещение,
повернув мысленно уголок АДВ
на бесконечно малый угол
![]() ,
например по часовой стрелке. Точка В
получит при этом возможное перемещение
,
например по часовой стрелке. Точка В
получит при этом возможное перемещение
![]() ,
направленное перпендикулярно АВ
и равное по модулю
,
направленное перпендикулярно АВ
и равное по модулю
![]() ;
точка С
получит возможное перемещение
;
точка С
получит возможное перемещение
![]() ,
параллельное опорной плоскости
шарнирно-неподвижной опоры С;
стержень ВС
повернется вокруг точки L
– центра поворота, определенного как
и МЦС в кинематике, как точка пересечения
перпендикуляров, проведенных через
точки В
и С
к направлениям их возможных перемещений.
Угол
,
параллельное опорной плоскости
шарнирно-неподвижной опоры С;
стержень ВС
повернется вокруг точки L
– центра поворота, определенного как
и МЦС в кинематике, как точка пересечения
перпендикуляров, проведенных через
точки В
и С
к направлениям их возможных перемещений.
Угол
![]() ,
на который стержень ВС
повернется вокруг точки L,
определяется равенством:
,
на который стержень ВС
повернется вокруг точки L,
определяется равенством:
![]() ,
откуда
,
откуда
![]() .
.
Для
нахождения
![]() воспользуемся теоремой синусов. Из
воспользуемся теоремой синусов. Из
![]() (см. рис. 10):
(см. рис. 10):
![]() .
.
Отсюда:
![]() .
.
Следовательно,
![]() .
.
Теперь
подсчитаем и приравняем к нулю сумму
работ сил
![]() ,
,
![]() и пары с моментом
при возможном перемещении системы.
и пары с моментом
при возможном перемещении системы.
Используя правило: работа сил, приложенных к вращающемуся телу, равна взятому с соответствующим знаком произведению момента сил относительно оси вращения на угол поворота. Поэтому:
![]() .
.
З
Рис. 11
Заменяя
в предыдущем равенстве
его выражением через
и учитывая, что
![]() ,
,
![]() ,
можем переписать его в виде:
,
можем переписать его в виде:
![]() .
.
Так
как
![]() ,
то отсюда:
,
то отсюда:
![]() кНм.
кНм.
Для
нахождения вертикальной составляющей
реакции заделки А
заменим в исходной схеме заделку
ползуном, который может перемещаться
в вертикальном направлении и к которому
жестко прикреплен угол АДВ,
а отброшенную связь компенсируем
вертикальной реакцией
![]() (рис. 11).
(рис. 11).
Даем
получившейся механической системе
возможное перемещение, мысленно
переместив угол АДВ
поступательно вверх (![]() ).
Стержень ВС
повернется вокруг центра поворота G
на угол
).
Стержень ВС
повернется вокруг центра поворота G
на угол
![]() .
Уравнение принципа возможных перемещений
запишется в виде:
.
Уравнение принципа возможных перемещений
запишется в виде:
![]() ,
,
откуда,
учитывая, что
![]() ,
,
![]() ,
,
![]() ,
получаем
,
получаем
![]() кН.
кН.
ПРИМЕР 6.
Сплошной
однородный цилиндр 1 массой
Рис. 12![]() кг
и радиусом
кг
и радиусом
![]() м
может вращаться без трения вокруг
неподвижной горизонтальной оси
.
С цилиндром жестко скреплены тонкие
однородны стержни 3 и 4 массой
м
может вращаться без трения вокруг
неподвижной горизонтальной оси
.
С цилиндром жестко скреплены тонкие
однородны стержни 3 и 4 массой
![]() и длиной
и длиной
![]()

![]() цилиндра 5 перемещается по вертикали.
В точке Д к
стержню 3 прикреплена пружина жесткостью
цилиндра 5 перемещается по вертикали.
В точке Д к
стержню 3 прикреплена пружина жесткостью
![]() кН/м.
В начальном положении системы стержень
3 и участок нити между стержнем и блоком
расположены горизонтально, а стержень
4 и ось пружины – вертикально; пружина
растянута на величину
кН/м.
В начальном положении системы стержень
3 и участок нити между стержнем и блоком
расположены горизонтально, а стержень
4 и ось пружины – вертикально; пружина
растянута на величину
![]() .
.
Начальные
значения обобщенных координат
![]() и
и
![]() равны нулю, а обобщенных скоростей -
равны нулю, а обобщенных скоростей -
![]() ,
,
![]() .
Трением в осях
,
,
массой пружины и нити пренебрегаем.
.
Трением в осях
,
,
массой пружины и нити пренебрегаем.
Используя уравнение Лагранжа II рода, найти кинематические уравнения движения системы при малых отклонениях цилиндра 1 от начального положения и определить круговую частоту и период колебания системы.
Решение.
Кинетическая энергия системы равна сумме кинетических энергий вращающегося цилиндра 1 с жестко присоединенными к нему стержнями и цилиндра 5, совершающего плоскопараллельное движение:
 .
.
В
этом выражении
![]() - момент инерции цилиндра относительно
его оси;
- момент инерции цилиндра относительно
его оси;
 - момент инерции стержня; в квадратных
скобках – момент инерции цилиндра 1 с
жестко присоединенными к нему стержнями.
- момент инерции стержня; в квадратных
скобках – момент инерции цилиндра 1 с
жестко присоединенными к нему стержнями.
Скорость
![]() центра цилиндра 5 равна сумме скорости
точки
центра цилиндра 5 равна сумме скорости
точки
![]() нити и скорости
нити и скорости
![]() точки
во вращательном движении вокруг полюса
.
точки
во вращательном движении вокруг полюса
.
Д
Рис. 13
![]() рассмотрим положение системы, при
котором цилиндр 1 и стержни 3 и 4 отклонены
от начального положения на угол
(рис. 13). Скорость точки
нити равна скорости точки Е,
в которой участок нити ВЕ
касается блока 2. Так как нить нерастяжима,
то проекция скоростей точек В
и Е на
направление нити равны. Поэтому:
рассмотрим положение системы, при
котором цилиндр 1 и стержни 3 и 4 отклонены
от начального положения на угол
(рис. 13). Скорость точки
нити равна скорости точки Е,
в которой участок нити ВЕ
касается блока 2. Так как нить нерастяжима,
то проекция скоростей точек В
и Е на
направление нити равны. Поэтому:
![]() .
.
Теперь
воспользуемся малостью отклонений
стержней от начального положения. Как
известно, функция
![]() и
и
![]() можно разложить в ряды Маклорена:
можно разложить в ряды Маклорена:
![]() ;
;
![]() .
.
При
«малых»
(до 0,1 радиана) значения
и
отличаются от первых членов соответствующих
разложений менее чем на 0,5%. Поэтому
можно принять
![]() ,
,
![]() .
Так как при «малом»
угол
.
Так как при «малом»
угол
![]() также является «малым», то
также является «малым», то
![]() .
Поэтому в этом случае
.
Поэтому в этом случае
![]() ,
тогда
,
тогда
![]() .
.
Подставляя в ранее написанное выражение для Т, после простых преобразований приводим его к виду:
![]() .
.
Для
нахождения обобщенных сил
![]() и
и
![]() ,
соответствующих обобщенным координатам
и
,
вновь обратимся к рис. 13. Чтобы определить
,
дадим мысленно системе возможное
перемещение, при котором обобщенная
координата
изменяется на бесконечно малую величину
,
соответствующих обобщенным координатам
и
,
вновь обратимся к рис. 13. Чтобы определить
,
дадим мысленно системе возможное
перемещение, при котором обобщенная
координата
изменяется на бесконечно малую величину
![]() ,
а обобщенная координата
не изменяется. В этом случае точка В
получит возможное перемещение
,
а обобщенная координата
не изменяется. В этом случае точка В
получит возможное перемещение
![]() ,
направленное по вектору
,
направленное по вектору
![]() .
Такие же по абсолютному значению
перемещения при «малых»
получат точки Е,
G,
К
и
.
Поэтому сила тяжести цилиндра 5 совершит
работу
.
Такие же по абсолютному значению
перемещения при «малых»
получат точки Е,
G,
К
и
.
Поэтому сила тяжести цилиндра 5 совершит
работу
![]() .
Работа сил тяжести стержней и силы
упругости
.
Работа сил тяжести стержней и силы
упругости
![]() пружины равна произведению их момента
относительно оси вращения
на угол поворота
,
т.е.
пружины равна произведению их момента
относительно оси вращения
на угол поворота
,
т.е.
![]() .
.
Из
рис. 13 видно (см.
![]() ),
что
),
что
![]() .
.
При
![]() .
Этот результат означает, что угол
.
Этот результат означает, что угол
![]() является малым более высокого порядка,
чем
(имеет порядок квадрата
),
и по сравнению с
им можно пренебречь. Тогда сумма работ
всех задаваемых сил при повороте цилиндра
1 на угол
будет:
является малым более высокого порядка,
чем
(имеет порядок квадрата
),
и по сравнению с
им можно пренебречь. Тогда сумма работ
всех задаваемых сил при повороте цилиндра
1 на угол
будет:
![]() .
.
Укорочение
пружины, соответствующее положению
цилиндра 1, повернутому из начального
положения на угол
,
равно разности
![]() .
Длина
.
Длина
![]() укоротившейся пружины равна
укоротившейся пружины равна
![]() ,
,
или при «малых» :
![]() .
.
Следовательно, укорочение пружины
![]() .
.
Так
как в начальный момент пружина была
растянута на величину
,
то ее растяжение уменьшается и станет
![]() ,
а упругая сила будет
,
а упругая сила будет
![]() .
.
Обобщенна сила, соответствующая углу :
![]() ,
,
или окончательно
![]() .
.
Для
нахождения обобщенной силы
,
соответствующей обобщенной координате
,
нужно сообщить системе возможное
перемещение, при котором
останется неизменным, а
увеличивается на бесконечно малую
величину
![]() .
В этом случае работу совершает только
сила тяжести цилиндра 5:
.
В этом случае работу совершает только
сила тяжести цилиндра 5:
![]() .
.
Обобщенная сила:
![]() .
.
Теперь составим уравнение Лагранжа:
![]() ,
,
![]() .
.
Частные производные:
![]() ;
;
![]() .
.
![]() ,
,
![]() .
.
Уравнение Лагранжа будет иметь вид:
![]() ;
;
![]() .
.
Из
второго уравнения после сокращения его
на
![]() :
:
![]() .
.
Подставив это выражение в первое уравнение, после простых преобразований получим:
![]() .
.
Обозначим:
![]() .
.
Величина:
![]() 1/с
1/с
и представляет искомую круговую частоту колебаний.
Период колебаний:
![]() с.
с.
Общее решение дифференциального уравнения малых колебаний цилиндра:
![]()
есть функция:
![]() .
.
Для
нахождения постоянных интегрирования
![]() и
и
![]() используем начальные условия: при
,
используем начальные условия: при
,
![]() ,
,
![]() (1/с).
(1/с).
Из
первого условия следует
![]() ;
из второго условия, учитывая, что:
;
из второго условия, учитывая, что:
![]() ,
,
получаем
![]() ;
;
![]() .
Поэтому окончательно:
.
Поэтому окончательно:
![]() .
.
Для нахождения интегрируем ранее полученное уравнение:
![]() .
.
Имеем:
![]() .
.
Из
начальных условий: при
,
![]() ,
,
![]() следует
следует
![]() ;
;
![]() .
Тогда:
.
Тогда:
![]() .
.
Интегрируя еще раз, получаем:
![]() .
.
Из
начальных условий: при
,
,
![]() следует
следует
![]() .
Поэтому:
.
Поэтому:
![]() .
.
После подстановки числовых значений:
![]() .
.
ПРИМЕР 7.
В
Рис. 14
![]() м
и массой
м
и массой
![]() кг,
равномерно распределенной по их объему.
Жесткость пружины
кг,
равномерно распределенной по их объему.
Жесткость пружины
![]() Н/м.
Н/м.
Начальные
значения обобщенных координат
и
равны нулю; начальное удлинение пружины
![]() ;
начальные значения обобщенных скоростей
;
начальные значения обобщенных скоростей
![]() м/с,
м/с,
![]() .
.
Решение.
Кинетическая энергия системы:
![]() .
.
Обобщенные силы:
![]() ,
,
![]() ,
,
где
![]() - сила упругости пружины.
- сила упругости пружины.
Уравнение Лагранжа для рассмотренной системы:
![]() ;
;
![]() .
.
Сила
упругости
зависит от деформации
![]() пружины, которая равна
пружины, которая равна
![]() ,
где
,
где
![]() - начальное значение деформации. Обозначим
- начальное значение деформации. Обозначим
![]() .
Тогда
.
Тогда
![]() ;
;
![]() .
С другой стороны, дифференциальные
уравнения движения системы можно
представить в виде:
.
С другой стороны, дифференциальные
уравнения движения системы можно
представить в виде:
![]() ;
;
![]() .
.
Вычитая из первого уравнение второе, получаем
![]() ,
,
или
![]() .
.
Подставляя заданное значение , получим:
![]() ,
где
,
где
![]() .
.
Решением
этого дифференциального уравнения при
начальных условиях: при
,
![]() ,
,
![]() является функция:
является функция:
![]() .
Тогда
.
Тогда
![]() .
.
Дифференциальные уравнения движения системы принимают вид:
![]() ;
;
![]() .
.
Интегрируя
эти уравнения при начальных условиях:
,
![]() ,
,
![]() ,
,
,
,
![]() ,
получим:
,
получим:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
После подстановки численных значений получим:
![]() ;
;
![]() .
.