

6.3. Виброакустическая (ва) диагностика процесса резания и
режущего инструмента
Одно из главных преимуществ ВА контроля заключается в том, что установить акселерометр на станке даже в производственных условиях значительно проще, чем встроить динамометрические устройства в уже изготовленный станок.
ВА сигнал и сила резания имеют свои преимущества и недостатки. Наилучшие результаты достигатются в системах мониторинга, контролирующих и ВА сигнал, и силы резания, где в зависимости от ситуации правильно делается акцент на тот или иной диагностический признак.
Особенности распространения акустического излучения из
зоны резания к месту установки акселерометров
Акселерометр устанавливается в удобном и безопасном месте на упругой системе станка.
Информация в виде упругих волн распространяется от зоны резания к точке установки акселерометра. В этом случае упругая среда выполняет функции канала наблюдения.
Поскольку по такому каналу идет не только полезный сигнал, но и помехи от работы других механизмов, то при выборе места установки акселерометра кроме соображений удобства и безопасности необходимо стремиться к тому, чтобы отношение амплитуды полезного сигнала (сигнала из зоны резания) к амплитуде помех было наибольшим.
Движение трехмерной среды при распространении по ней упругих волн описывается в общем случае линейным относительно вторых производных гиперболическим дифференциальным уравнением:
![]() ,
(6.15)
,
(6.15)
где U – характеризует амплитуду отклонения среды в точке с координатами x, y, z в момент времени t, F(t, x, y, z) – характеризует возмущающую силу, действующую на исследуемую среду, а – скорость распространения волны. Для решения уравнение должно быть дополнено начальными и граничными условиями.
Получить аналитическое решение этого уравнения возможно только для ограниченного количества простейших вариантов подобных задач, решаемых с помощью методов, описываемых в дисциплине «Уравнения математической физики». В подавляющем большинстве случаев для деталей станков аналитическое решение уравнения 6.15 невозможно из-за сложной формы упругой среды, по которой распространяются упругие волны, сложности моделирования граничных условий и условий прохождения волн через подвижные и неподвижные стыки. К этим сложностям добавляется то, что длина волн ВА сигнала соизмерима или больше размеров конструктивных элементов станка, что вызывает очень сложную интерференционную картину в объеме упругой среды. Сюда можно добавить и то, что прохождение и отражение ВА энергии в местах стыков деталей зависит от давления в стыках, формы контактных поверхностей и целого ряда факторов, которые просто невозможно учесть, из-за их случайного характера. Ситуацию спасает то, что для практических целей можно обойтись без аналитических решений. Достаточно знать основные закономерности прохождения ВА сигнала по упругим средам и провести несколько коротких экспериментов на подготовительном этапе.
Основные закономерности:
- Каждый конструктивный элемент имеет набор собственных частот, т.е. таких частот, на которых амплитуда отклика на соответствующее гармоническое воздействие наибольшая.
- Форма колебаний элемента (форма его крайних положений в пространстве при колебаниях на собственных частотах) в первом приближении постоянна, но ее размах зависит от амплитуды внешнего воздействия.
- В аналитических решениях помимо амплитудных максимумов присутствуют узловые точки, в которых амплитуда колебаний на собственной частоте может быть нулевой. На практике такого не бывает, но амплитуда ВА сигнала может значительно меняться при установке акселерометра в разные точки детали, имеющей сложную пространственную форму и свойственный ей характер крепления.

Формы колебаний балки, заделанной на левом конце
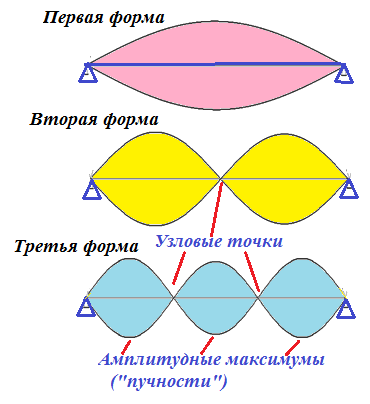
Формы колебаний балки, закрепленной на концах
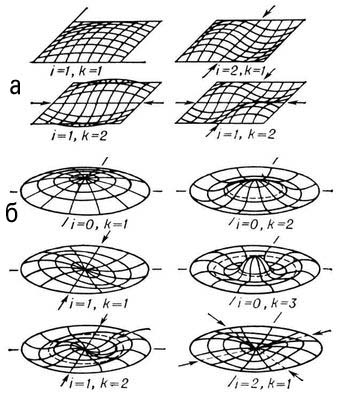
Формы колебаний прямоугольной мембраны (а) и круглой мембраны (б)
Изображение трехмерных форм колебаний сложного тела
Сигнал, приходящий к акселерометру, является суммой сигналов возмущений от разных источников помех и самого процесса резания, преобразованных динамической системой станка, являющейся каналом наблюдений.
Чаще приходится иметь дело с частотным представлением динамических систем, где основной характеристикой канала наблюдения является его АЧХ (амплитудно-частотная характеристика) H(ω). Формула для вычисления оценки частотной характеристики канала наблюдения:
![]() ,
,
где Y(ω) и X(ω) – текущий спектр ВА сигналов соответственно на выходе и входе. Здесь ω = 2πf – круговая частота.

Частотное представление динамической системы станка
Частотные характеристики канала наблюдений различают по перемещению, скорости и ускорению. Если в упругой среде распространяется волна с круговой частотой ω и амплитудой А, то достигаемая кинетическая энергия w единицы объема среды с плотностью ρ определяется выражением:
![]() .
.
Если энергия волны постоянна, но меняется только ее круговая частота ω, то ее амплитуда должна быть обратно пропорциональной частоте:
![]() .
(6.16)
.
(6.16)
Т.о.,
это выражение задает тенденцию изменения
амплитудно-частотной характеристики
(АЧХ) по перемещению
![]() (податливость)
канала наблюдения.
(податливость)
канала наблюдения.
│H(ω)│~ 1/ω (А)
Если
при тех же условиях на выходе регистрировать
амплитуду
виброскорости,
то получится АЧХ по виброскорости
![]() (подвижность),
которая связана с H(ω)
сомножителем, равным круговой частоте
(подвижность),
которая связана с H(ω)
сомножителем, равным круговой частоте
![]() .
(6.17)
.
(6.17)
При регистрации амплитуды виброускорения получится АЧХ по виброускорению Hа(ω) (ускоряемость):
![]() .
(6.18)
.
(6.18)
Можно написать, что │Hа(ω)│ ~ ω (В)
Из (А) и (В) следует, что при регистрации виброперемещения будут ослабляться сигналы на высокой частоте, а при регистрации виброускорения сигналы на высокой частоте будут наоборот усиливаться.
Выражения 6.16 – 6.18 показывают, что в зависимости от частотного диапазона, в котором находится информационный сигнал или где соотношение полезный сигнал – шум наибольшее, можно выбирать, какой частотной характеристикой целесообразно пользоваться.
Надо учитывать, что акселерометры регистрируют виброускорение. Для получения сигнала виброскорости или виброперемещения необходимо исходный сигнал проинтегрировать один или два раза, соответственно.
На рис. 6.38 показан пример АЧХ по перемещению и по ускорению. Линии 1 и 2 показывают тенденции изменения этих АЧХ в соответствии с выражениями А и В. Жирные линии показывают реальный вид соответствующих АЧХ, где экстремумы располагаются в районе собственных частот упругой системы.

Рис. 6.38. Пример амплитудно-частотных характеристик канала наблюдения: 1 – по вибросмещению; 2 – по виброускорению
Экспериментально было установлено, что помехи, идущие от источников ВА сигнала, расположенных вне зоны резания, находятся в диапазоне частот ниже 2 - 3 кГц, а сигналы от процесса резания охватывают гораздо более высокочастотный диапазон. В связи с этим в большинстве практических случаев приходится регистрировать виброускорение, иногда виброскорость, что делает канал наблюдений более чувствительным к высокочастотным составляющим.
Первоначальный ВА сигнал, имевший широкий спектр частот, при прохождении через упругую среду затухает и фильтруется. Особенно сильно сигнал искажается при прохождении через стыки между отдельными деталями станка. Особенно опасны подвижные стыки.
На рис. 6.39 показаны графики, где по
вертикальной оси откладывалось отношение
![]() амплитуд ускорения ВА сигнала, прошедшего
через стык, к амплитудам ВА сигнала,
поступающего в упругую систему, а по
горизонтали откладывалась частота
исследуемого сигнала.
амплитуд ускорения ВА сигнала, прошедшего
через стык, к амплитудам ВА сигнала,
поступающего в упругую систему, а по
горизонтали откладывалась частота
исследуемого сигнала.
Видно, что с ростом частоты f и понижением давления в стыке р функция уменьшается. При этом на низких частотах при уменьшении р изменяется меньше чем на высоких в процентном отношении. Так, например, при увеличении давления в стыке от 0,3 до 2,4 МПа функция в диапазоне f = 1 кГц увеличивается только на 20%, а в диапазоне f = 16 кГц практически в два раза.
Т.о., сглаживающее и фильтрующее действие упругой системы проявляется в том, что по мере удаления позиции акселерометра от зоны резания ВА сигнал теряет высокочастотные составляющие.
![]() При
выборе места установки датчика на станке
важно кроме удобства эксплуатации
учесть, в какой части
спектра содержится диагностическая
информация, и пропускает ли
упругая система станка сигналы этих
частот к датчику.
При
выборе места установки датчика на станке
важно кроме удобства эксплуатации
учесть, в какой части
спектра содержится диагностическая
информация, и пропускает ли
упругая система станка сигналы этих
частот к датчику.

Рис. 6.39. Изменение отношения амплитудных спектров ВА сигналов при прохождении единичного стыка при разных давлениях в контакте
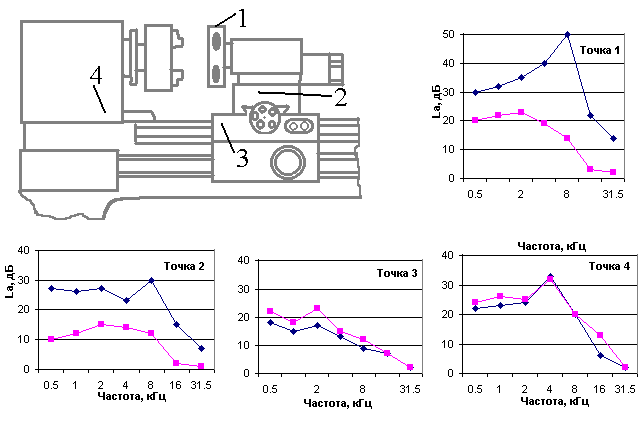
Рис. 6.40. Изменение спектров ВА сигнала при распространении по упругой системе токарного станка с револьверной головкой : светлые линии – амплитуда на холостом ходу; темные линии – амплитуда при резании
Количество ВА энергии, достигающей точки установки акселерометра, зависит не только от частотной характеристики канала наблюдения, но и от мощности ВА сигнала, генерируемого самим процессом резания. Из спектров на рис. 6.40 видно, что акселерометр на шпиндельной бабке не позволяет вести наблюдения за процессом резания.
Однако для практических целей на всех операциях, где во время резания инструмент или деталь не имеют вращательного движения, акселерометр предпочтительнее располагать со стороны неподвижного элемента. На токарных станках – со стороны инструмента, при сверлении, фрезеровании, растачивании – со стороны заготовки.
Но существуют операции, где одновременно вращаются и инструмент и заготовка, например, при круглом шлифовании. При круглом шлифовании скорость резания, определяемая диаметром шлифовального круга и частотой его вращения, значительно выше скоростей трения в шпиндельных подшипниках, обеспечивающих вращение заготовки. Этот фактор позволяет на круглошлифовальных и шлицешлифовальных станках устанавливать акселерометр в удобном месте шпиндельной бабки и надежно регистрировать сигнал от процесса резания. Другой путь решения этих проблем опирается на применение более сложных технических решений, т.е. различного вида токосъемников, включая и каналы с телеметрической связью.
На практике пригодность различных каналов наблюдения на предварительном этапе может быть оценена достаточно просто с помощью предварительных экспериментов.