Моделювання елементів електроприводів різницевими рівняннями
Аперіодична ланка описується диференціальним рівнянням першого порядку
![]() або
або
![]() ,
,
де T – стала часу ланки;
k – коефіцієнт підсилення ланки;
x – вхідний сигнал.
З використанням для інтегрування явної формули Ейлера першого порядку
![]()
підставляючи значення похідної
![]() у формулу числового методу отримаємо
у формулу числового методу отримаємо
![]() ,
,
звідки ![]() .
.
Аналогічно, з використанням для інтегрування неявної формули Адамса другого порядку, яка є однією з найкращих формул для цієї мети завдяки своїй простоті та числовій стійкості,
![]()
отримаємо
![]() ,
,
звідки після спрощень матимемо
![]() .
.
Потрібно відзначити, що використання неявних числових методів не тільки не ускладнює задачу, а й призводить до отримання рекурентних рівнянь з вищими стійкістю та точністю порівняно з використанням явних методів.
До п. 1.2.
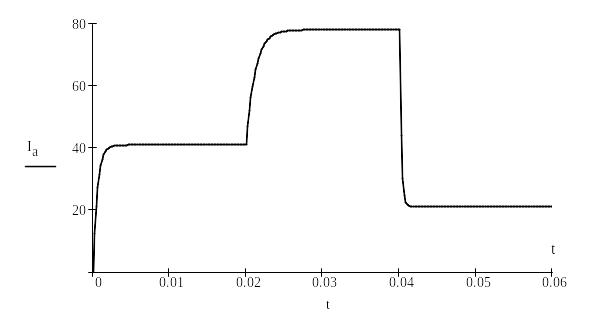
Приклад розв'язування задачі з використанням методу Ейлера для дослідження режимів зміни навантаження генератора постійного струму подано нижче для середовища MathCAD.
MathCAD
Unom : = 230 Номінальна напруга на якорі генератора Ud : = 220 Номінальна напруга збудження генератора KG : = 1.045 Коефіцієнт підсилення генератора Td : = 0.8 Стала часу збудження генератора Ra : = 0.27 Опір якоря генератора La : = 0.0035 Індуктивність якоря генератора Rnom : = 5.1 Опір номінального навантаження La : = 0.0035 Індуктивність якоря генератора h : = 0.001 Крок моделювання Tmax : = 0.06 Тривалість перехідного процесу
i : = 0 .. N ti : = ih Значення часу
Початкові умови: Залежність опору навантаження від часу:
Залежність електромагнітної сталої часу якірного кола від опору навантаження:
Знаходження значень напруги і струму якоря за формулою Ейлера
Виведення графіка струму в навантаженні
|

Модель генератора постійного струму
Опис кола збудження є однаковим як для генератора постійного струму (ГПС), так і для двигуна постійного струму (ДПС), що працює зі змінним потоком.
Очевидним є те, що змоделювати, тобто, відтворити в моделі ті динамічні процеси, які відбуваються в оригіналі, наприклад, генераторі постійного струму, абсолютно точно неможливо. Мову можемо вести тільки про наближення, про отримання результатів моделювання з деякою точністю, яка значною мірою визначається допущеннями, які ми приймаємо, створюючи модель. Так, генератор постійного струму в неробочому режимі, коли якірне коло розімкнене, з достатньою для багатьох застосувань точністю можна розглядати як аперіодичну ланку першого порядку за таких допущень:
не враховуємо нелінійність кривої намагнічування;
нехтуємо вихровими струмами в станині (це цілком справедливо для генераторів зі шихтованою станиною);
потоки розсіювання обмотки збудження генератора (ОЗГ) пропорційні струмові збудження.
|
|
а) електрична схема |
б) структурна модель |


рис. 1.6. Коло збудження ГПС
У випадку врахування навантаження (замкнуте якірне коло) приймаються додаткові допущення:
індуктивність якоря незмінна;
трансформаторною ЕРС у колі якоря нехтуємо;
величина дії реакції якоря в залежності від точності моделі або не враховується, або приймається пропорційною струмові якоря.
Найпростіша математична модель ГПС базується на рівнянні електричної рівноваги кола збудження
![]() та рівнянні
та рівнянні
![]() ,
,
де Ud – напруга збудження генератора;
id – струм кола збудження генератора;
Rd – опір обмотки збудження генератора (ОЗГ);
Ld = L + Ls – індуктивність ОЗГ, яка має дві складові:
L – індуктивність намагнічування;
Ls – індуктивність розсіювання;
eG – електрорушійна сила (ЕРС) якоря генератора;
KG – коефіцієнт підсилення генератора за напругою.
Виконаємо нескладні перетворення
диференціального рівняння, помноживши
його на KG ,
а останній член – на
![]() ,
після чого отримаємо
,
після чого отримаємо
![]() .
.
Позначивши
![]() –
електромагнітна стала часу ОЗГ і
,
отримаємо
–
електромагнітна стала часу ОЗГ і
,
отримаємо
![]() .
.
Це є спрощена математична модель генератора постійного струму, що описує перехідні процеси генератора без навантаження (режими неробочого ходу).
Для активного навантаження (рис. 1 .7)
La +
Lн = 0,
тому струм якоря ia
обчислюється за виразом
![]() ,
,
де Ra = Ra + Rн – сумарний опір якірного кола;
Ra – опір якоря ГПС;
Rн – опір навантаження в якірному колі
|
|
а) електрична схема |
б) структурна модель |

рис. 1.7. Генератор постійного струму
З урахуванням індуктивностей обмотки
якоря La і навантаження Lн
до диференціального рівняння опису
кола ОЗГ додається ще одне:
![]() (див. рис. 1 .7). Поділивши це рівняння на
Ra
і позначивши
(див. рис. 1 .7). Поділивши це рівняння на
Ra
і позначивши
![]() –
електромагнітна стала часу якірного
кола, отримаємо диференціальне рівняння
якірного кола, яке разом з рівнянням
кола збудження є математичною моделлю
ГПС:
–
електромагнітна стала часу якірного
кола, отримаємо диференціальне рівняння
якірного кола, яке разом з рівнянням
кола збудження є математичною моделлю
ГПС:

Значення індуктивності намагнічування ОЗГ L та індуктивності обмотки якоря La машини постійного струму (якщо ці дані відсутні в каталозі) можна розрахувати за формулами:
![]() і
і
![]() ,
,
де pп – число пар полюсів;
Wp – число витків одного полюса ОЗГ;
– магнітний потік одного полюса ОЗГ;
F – ампер-витки ОЗГ;
k – емпіричний коефіцієнт:
k = 0,6 для некомпенсованих машин;
k = 0,15 для компенсованих машин;
н – номінальна частота обертання якоря генератора.
Значення індуктивності розсіювання
обмотки збудження Ls машини
постійного струму можна знайти за
наближеною формулою
![]() ,
де – коефіцієнт
розсіювання, приблизно дорівнює 0,1 ...
0,2 (для потужніших машин – менше значення),
а точніше обчислюється за формулою
,
де – коефіцієнт
розсіювання, приблизно дорівнює 0,1 ...
0,2 (для потужніших машин – менше значення),
а точніше обчислюється за формулою
![]() ,
,
де – повітряний проміжок під полюсом у сантиметрах;
D – діаметр якоря у сантиметрах;
l – довжина якоря у сантиметрах.
Точнішу модель генератора, що враховує нелінійність кривої намагнічування, можна отримати за умови апроксимації характеристики намагнічування функцією арктангенса [2]:
![]()
У цьому випадку для отримання вищої
точності в моделі генератора залежність
eG(id)
апроксимується залежністю
![]() ,
де A, B – коефіцієнти апроксимації.
Коефіцієнти апроксимації для першого
наближення вибираються таким чином: A
= EGн , тоді
,
де A, B – коефіцієнти апроксимації.
Коефіцієнти апроксимації для першого
наближення вибираються таким чином: A
= EGн , тоді
![]() ,
звідки
,
звідки
![]() ,
після чого можливе їх уточнення
ітераційним чи якимось іншим методом
(для цього дуже зручно використовувати
математичний пакет MathCAD).
Така апроксимація є простою і, в той же
час, забезпечує похибку не гірше (1-2)%, а
за плавністю та точністю відтворення
похідної
,
після чого можливе їх уточнення
ітераційним чи якимось іншим методом
(для цього дуже зручно використовувати
математичний пакет MathCAD).
Така апроксимація є простою і, в той же
час, забезпечує похибку не гірше (1-2)%, а
за плавністю та точністю відтворення
похідної
![]() має переваги перед іншими, наприклад,
поліноміальними.
має переваги перед іншими, наприклад,
поліноміальними.
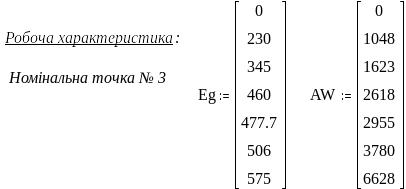
Реалізований в пакеті MathCAD приклад знаходження апроксимаційної залежності для напруги і ампер-витків обмотки збудження генератора подано нижче.
MathCAD
N : = 6 Кількість точок робочої характеристики i : = 0 .. N
Побудова графіка апроксимаційної кривої та експериментальних точок
|



За відсутності даних про криву
намагнічування у технічному паспорті
генератора, можна скористатися
універсальною кривою намагнічування
[3]
(рис. 1 .8), якій відповідають
коефіцієнти апроксимації
A = 0,858
і B = 2,351,
тобто, вихідна напруга генератора
буде апроксимуватися залежністю
![]() .
.
рис. 1.8. Універсальна крива намагнічування
Практичне застосування знайшла також й інтерполяція кривої намагнічування сплайнами [4, 5, 6], що також відповідає вимогам точності та гладкості, але потребує відповідного програмного забезпечення для реалізації цього підходу. Засоби апроксимації сплайнами реалізовані у математичних пакетах MathCAD і MATLAB і можуть доволі просто використовуватися [Error: Reference source not found, 7, 8, 9, 10]. Обидва способи наближення кривої намагнічування практично рівноцінні щодо точності та витрат комп’ютерного часу.
Підвищити точність відтворення реальних процесів у колі збудження генератора постійного струму з масивною станиною можна, якщо врахувати розмагнічувальну дію вихрових струмів у станині [11, 12]. Для цього в електричну схему моделі кола збудження вводиться додатковий контур Rk – L , що імітує дію вихрових струмів (рис. 1 .9, а). Ввівши позначення Tk = L /Rk (стала часу контуру вихрових струмів), T = L /Rd , Ts = Ls /Rd можна побудувати структурну схему, показану на рис. 1 .9, б.
|
або
|
а) електрична схема |
б) структурна модель |

рис. 1.9. Схема і структурна модель генератора постійного струму з врахуванням контуру вихрових струмів
Така модель описується системою диференціальних і алгебричних рівнянь:
![]() або
або ![]()
де i – струм намагнічування;
ik – струм контуру імітації вихрових струмів,
звідки можна отримати вирази в операторній формі для струмів збудження та намагнічування:
![]() ;
;
![]() .
.
Для більшості генераторів постійного струму з масивною станиною стала часу еквівалентного контуру вихрових струмів Tk складає 15% ... 30% від сталої часу обмотки збудження TG . Точніше значення сталої часу Tk знаходиться за емпіричною формулою [Error: Reference source not found]:
 ;
;
де lj – довжина силової лінії у спинці між полюсами у сантиметрах;
a, b – товщина і довжина спинки станини у сантиметрах;
k = 2104 (для сталі).
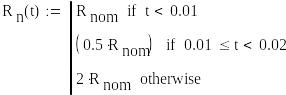
Збільшення швидкодії систем з великими сталими часу, наприклад, обмоткою збудження, досягається шляхом використання форсованого режиму – перевищенням напруги збудження Ud номінальної величини в декілька разів. У цьому разі після досягнення номінального режиму eG = Uном напругу збудження потрібно повернути назад до номінального значення, щоб уникнути аварійних режимів. Приклад найпростішої реалізації з використанням реле напруги для генератора постійного струму показано на рис. 1 .3. Для такої схеми величина додаткового опору Rдод вибирається з умови забезпечення номінального струму збудження після виходу на номінальний режим і обчислюється просто, виходячи із залежностей
 –
для номінального режиму;
–
для номінального режиму;
 –
для режиму форсування;
–
для режиму форсування;
звідси
![]() ,
де Kf
– коефіцієнт форсування напруги
збудження.
,
де Kf
– коефіцієнт форсування напруги
збудження.
До п. 1.3.3.
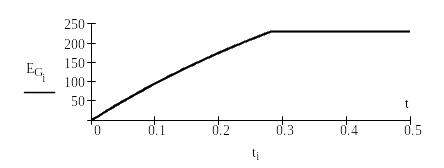
Приклад розв'язування задачі з використанням методу Ейлера (див. стор. 15) для дослідження режиму форсованого пуску генератора постійного струму на неробочому ході (без врахування навантаження в колі якоря) подано нижче для середовища MathCAD.
MathCAD
Unom : = 230 Номінальна напруга на якорі генератора Ud : = 220 Номінальна напруга збудження генератора KG : = 1.045 Коефіцієнт підсилення генератора Ld : = 0.8 Індуктивність обмотки збудження генератора Rd : = 82 Опір обмотки збудження генератора Kf : = 2.5 Коефіцієнт форсування h : = 0.001 Крок моделювання Tmax : = 0.5 Тривалість перехідного процесу Кількість точок перехідного процесу i : = 0 .. N t0 : = 0 Значення часу ti+1 : = h(i + 1) Залежність додаткового опору від ЕРС генератора (імітація реле напруги):
Залежність сталої часу обмотки збудження від додаткового опору:
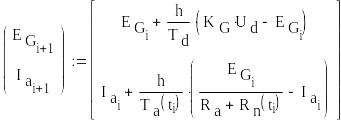
Знаходження ЕРС генератора під час форсованого пуску за формулою Ейлера:
Виведення графіка ЕРС
|