

6.2.1. Управление триммером руля высоты
Триммер руля высоты предназначен для аэродинамической балансировки рулевой поверхности, а так же он увеличивает эффективность руля высоты при его отклонении вверх или в низ, если ручка управления триммером находится в неподвижном положении.

Рис. 6.1.. Схема управления триммером руля высоты.
В систему управления триммером входят: (Рис. 6.1.) Ручка управления триммером (В), которая находится на центральном пульте в кабине пилотов. Тросовая проводка, которая проложена от ручки управления до качалки между шпангоутами 6 – 7. Тяги управления, которая находится между качалкой и качалкой, расположенной на кронштейне РВ. Тяги управления, которая находится между качалкой и кронштейном управления триммером.

Рис. 6.2. Схема соединения тяг управления триммера и руля высоты
Управление триммером осуществляется ручкой (В) на центральном пульте, которая перемещает тросовую проводку (А), поворачивает качалку (3) (рис.6.2.), далее движение передается на тягу (11), поворачивая качалку (4), после чего тяга (12) воздействует на кронштейн триммера (6) и отклоняет триммер (С).
6.2.2. Управление щитками
Управление щитками закрылками жёсткое состоит из: ручки выпуска и уборки щитков Е, кронштейн фиксации ручки, тяги С, D, кронштейны с поворотными тягами А, В (Рис. 5.11.).
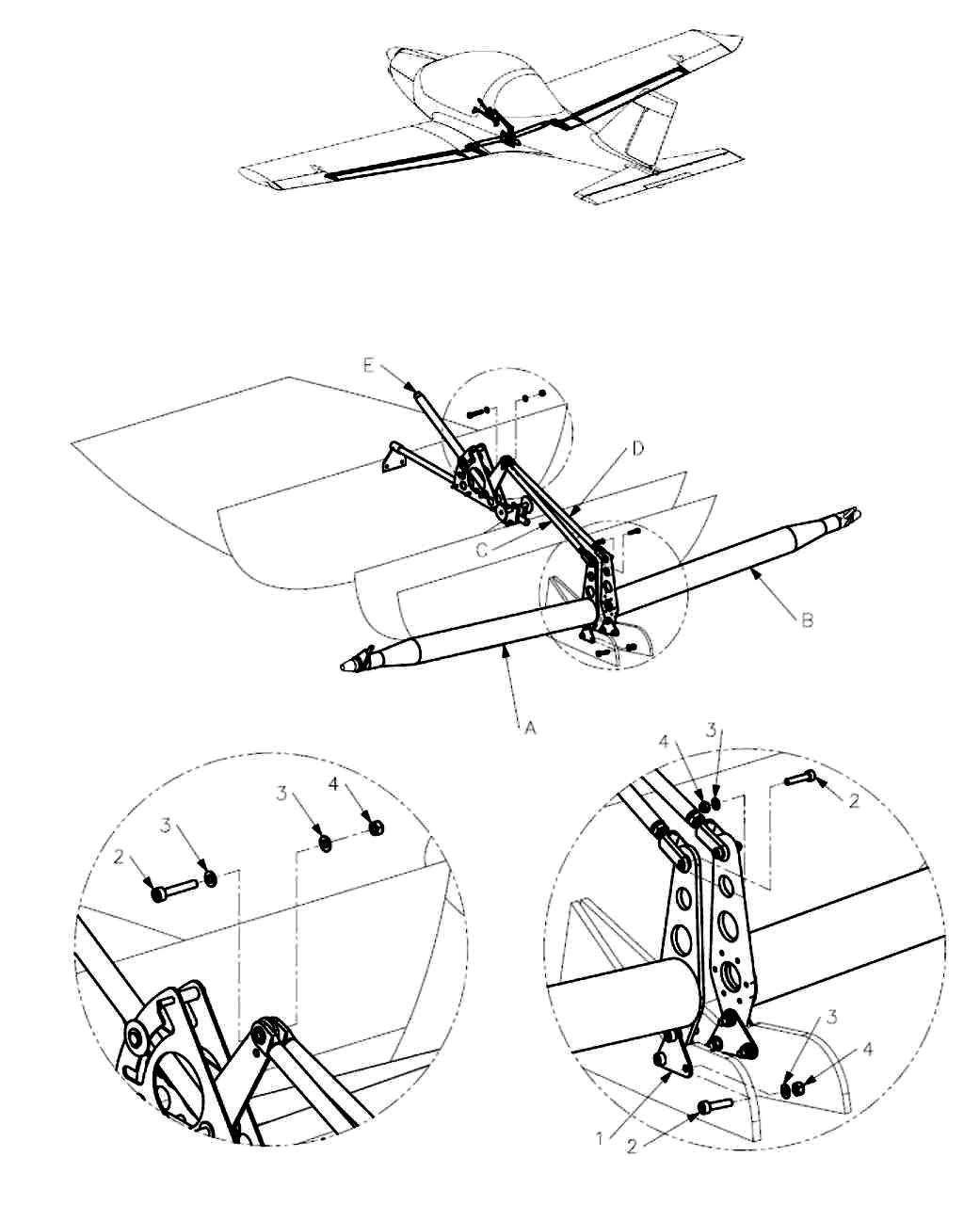
Рис. 6.3. Схема управления щитками
Кронштейн
фиксации ручки
Для того чтобы выпустить щитки необходимо: нажать кнопку на ручке Е управления щитками и потянуть её вверх до нужного положения 15° или 35° отпустить кнопку тем самым, фиксируя положение ручки и щитка. Движение передаётся от ручки Е на тяги С, D, и кронштейн поворотных тяг А, В, которые выпускают щитки (закрылки). Уборка щитков (закрылков) производится в той же последовательности, только ручка опускается вниз до нулевого положения и фиксируется в нём.
Максимальная скорость выпуска щитков на 15° - 1 категории Vfe |
140 км/ч. |
Максимальная скорость выпуска щитков на 35° - 2 категории Vfe
|
120 км/ч. |
Vfe – максимальная скорость выпуска закрылков. Предусмотрены такие же ограничения по скорости для полета с выпущенными закрылками.
6.3. Классификация систем управления самолётом (12 мин.).
Управление самолетом – это процесс изменения сил и моментов, необходимых для полета по заданной траектории..
Система управления самолетом может быть неавтоматической, полуавтоматической или автоматической.
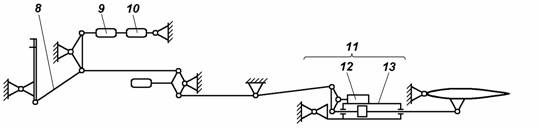
Если процесс управления осуществляется непосредственно пилотом, т.е. пилот посредством мускульной силы приводит в действие органы управления, обеспечивающие управление самолетом, то система управления называется неавтоматической (прямое управление самолетом). Неавтоматические системы могут быть механическими и гидромеханическими (рис. 6.4.). Механические системы – это первые самолётные системы, на базе которых созданы все современные комплексные системы основного управления. Балансировка и управление здесь осуществляются непосредственно мускульной силой экипажа в течение всего полёта.
 а
а
 б
Рис.
6.4. Неавтоматизированные механическая
(а) и гидромеханическая (б) системы
основного управления самолетом:
б
Рис.
6.4. Неавтоматизированные механическая
(а) и гидромеханическая (б) системы
основного управления самолетом:
1 – командный рычаг; 2 – тяга проводки управления; 3 – качалка или роликовая направляющая; 4 – балансир массы проводки управления; 5 – двуплечная качалка, компенсирующая температурные изменения длины гермоотсека фюзеляжа; 6 – кронштейн навески руля; 7 – рычаг управления руля; 8 – двуплечий рычаг; 9 – пружинный загружатель командного рычага; 10 – механизм триммирования (снятия нагрузки); 11 – рулевой привод; 12 – гидравлический золотник; 13 – гидроцилиндр.
Если процесс управления осуществляется пилотом через механизмы и устройства, обеспечивающие и улучшающие качество процесса управления, то система управления называется полуавтоматической. Если создание и изменение управляющих сил и моментов осуществляется комплексом автоматических устройств, а роль пилота сводится к контролю за ними, то система управления называется автоматической.
По источнику энергии, затрачиваемой на отклонение рулей, управление бывает:
Ручное – за счёт мускульной силы пилота;
Бустерное – за счёт использования энергии посторонних источников (как правило, гидроусилителей).
6.4. Заключительная часть занятия. (3 мин.).
1. подвести итоги;
2. задание на самоподготовку: изучить материал данного занятия;
3. ответить на вопросы.
Занятие 7. Управление передней опорой шасси. Управление тормозами колёс. Управление двигателем.
7.1. Организационная часть занятия (5 мин.).
7.2. Назначение и конструкция систем управления передней опорой шасси, управление тормозами колёс, управление двигателем (25 мин.)
7.3. Роль пилота в системе управления (12 мин.)
7.4. Заключительная часть (3 мин.)
7.1. Организационная часть занятия (5 мин.).
Порядок изучения занятия №7.
7.2. Назначение и конструкция систем управления передней опорой шасси, управление тормозами колёс, управление двигателем (25 мин.)