

Глава 3 .
ОСНОВЫ КИНЕМАТИКИ И ДИНАМИКИ.
3.1. Поступательное движение твердого тела.
К простейшим движениям тела относятся поступательное движение и вращение вокруг неподвижной оси.
Поступательным называется такое движение твердого тела, при котором всякая прямая, проведенная в этом теле, остается параллельной своему начальному положению.
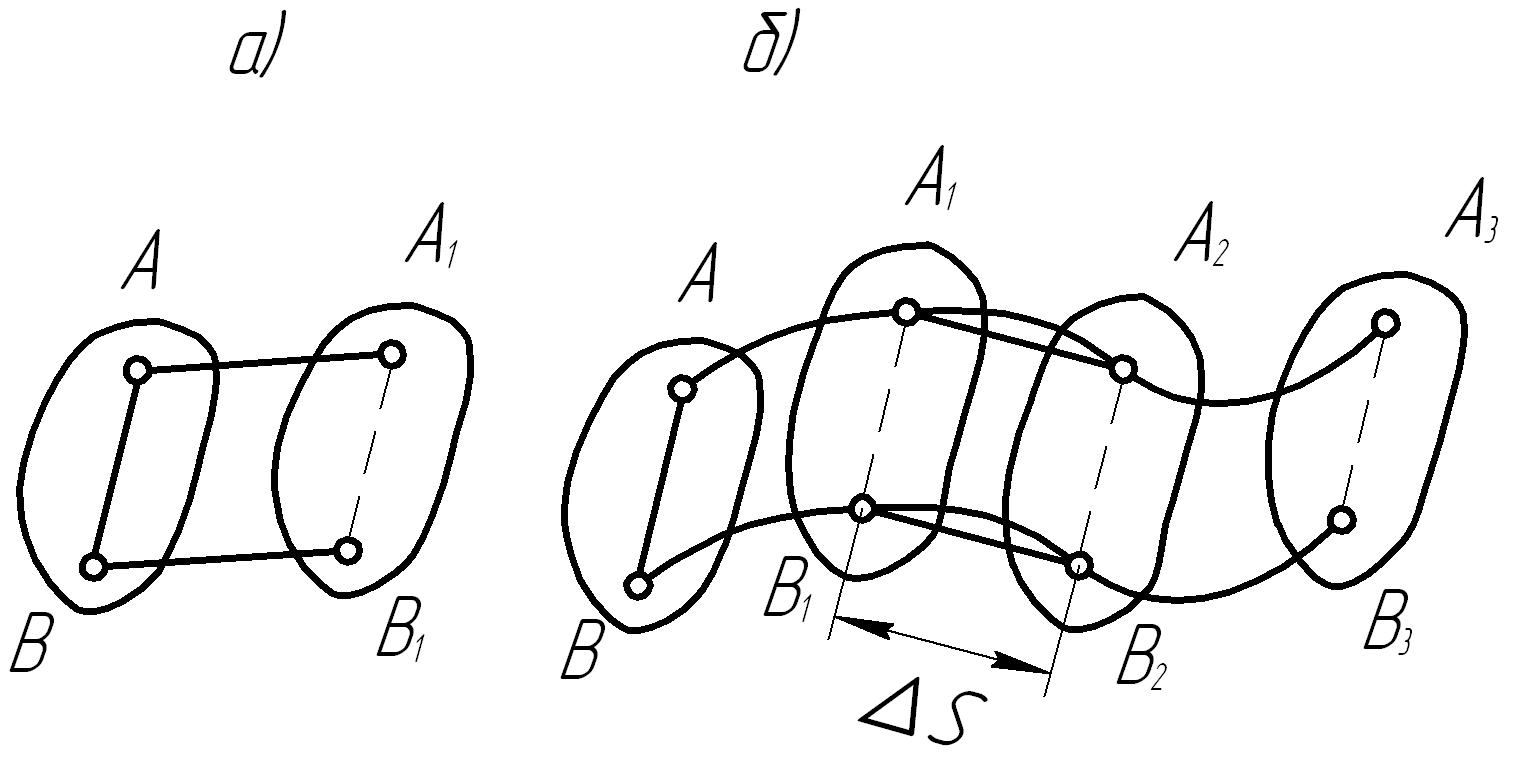
Рис. 29. Поступательное движение тела.
Рассмотрим тело (рис. 29), которое совершает поступательное движение. Проведенная в теле прямая АВ во время движения перемещается параллельно своему начальному положению. Рассмотрим перемещение тела за малый промежуток времени Δt.
При этом можно считать, что точки А и В перемещаются по прямолинейным и параллельным прямым. За время Δt они пройдут одинаковые пути Δs. Следовательно, скорости этих точек будут одинаковы по величине
VA = VB = V
и направлены в одну сторону, т. е.
![]() =
=
![]() =
=
![]() .
.
Аналогично доказывается равенство ускорений точек тела при поступательном движении:
![]() =
=
![]() =
.
=
.
Итак, при поступательном движении тела все его точки описывают одинаковые траектории и в любой момент времени имеют равные по величине и одинаково направленные скорости и ускорения.
Поэтому поступательное движение тела вполне характеризуется движением одной его точки. Однако поступательное движение может совершать только твердое тело, а не отдельная точка.
Примером поступательного движения служит движение поршня паровой машины, движение вагона на прямом участке пути и т. п.
Поступательное движение может быть прямолинейным и криволинейным. При прямолинейном поступательном движении все точки тела описывают равные и параллельные прямые линии (рис. 29, а). При криволинейном поступательном движении все точки тела описывают одинаковые кривые (рис. 29, b).
3.2. Скорости и ускорения точек вращающегося тела.
Точки тела, вращающегося вокруг оси, перемещаются по окружностям (рис. 30, а), радиусы которых r равны расстояниям точек от оси вращения.
Линейная скорость V точки А и угловая скорость ω тела cвязаны между собою линейной зависимостью
VА= ω r.
Подставив в формулу для линейной скорости точек тела, вращающегося вокруг неподвижной оси, значение n угловой скорости в оборотах в минуту, получим
VА= r.
Направлена по перпендикуляру к радиусу r в сторону ω (рис.30, а).
В
общем случае вектор скорости точки А,
вращаясь вокруг точки О, изменяется по
величине и направлению. Поэтому у этой
точки будет иметь место нормальное
ускорение
![]() (характеризует
изменение
по
направлению) и тангенциальное ускорение
(характеризует
изменение
по
направлению) и тангенциальное ускорение
![]() (характеризует изменение
по
величине).
Величина нормального ускорения
точки А
определится как
(характеризует изменение
по
величине).
Величина нормального ускорения
точки А
определится как
![]() =
=
![]() .
.
Подставляя в это выражение значение скорости VА= ω r, получаем
= ω2 r.
Направлено по радиусу r к центру О вращения.
Касательное ускорение точки определяется из выражения
![]() =ε
r,
=ε
r,
где ε – угловое ускорение вращающегося тела.
Направлено перпендикулярно r в сторону ε.
Полное ускорение точки при неравномерном вращении вокруг оси (рис. 30, б) геометрически складывается из касательного и нормального ускорений
А = + .

Рис. 30. Скорости и ускорения точки вращающегося тела.