

1.14. Приведение силы к точке
В начале Х1Х века Л. Пуансо доказал теорему о параллельном переносе силы в любую заданную или выбранную точку.
Пусть
дана сила
,
приложенная к точке А
твердого
тела, и ее требуется перенести в точку
О
(рис.
16, а).
Приложим к телу в точке 0
(рис.
16,6)
уравновешенную систему сил
![]() ,′
′′,
параллельных
и равных ей по модулю (т. е. P'
= P"
= P).
Теперь
кроме силы
′′,
приложенной к точке
О,
образовалась
пара сил (
,
′)
с моментом М=P
h.
но
так как и момент данной силы
относительно точки
О
равен
М0(
)=P
h,
то
М=
Мо(
).
,′
′′,
параллельных
и равных ей по модулю (т. е. P'
= P"
= P).
Теперь
кроме силы
′′,
приложенной к точке
О,
образовалась
пара сил (
,
′)
с моментом М=P
h.
но
так как и момент данной силы
относительно точки
О
равен
М0(
)=P
h,
то
М=
Мо(
).
Таким образом, всякую силу , приложенную к телу в точке А, можно переносить параллельно линии действия в любую точку О, присоединив пару сил, момент которой равен моменту данной силы относительно новой точки ее приложения.
Операция такого переноса силы называется приведением силы к точке, а появляющаяся при этом пара ( , ′) с моментом М= Мо( ) называется присоединенной парой (рис. 16, в).
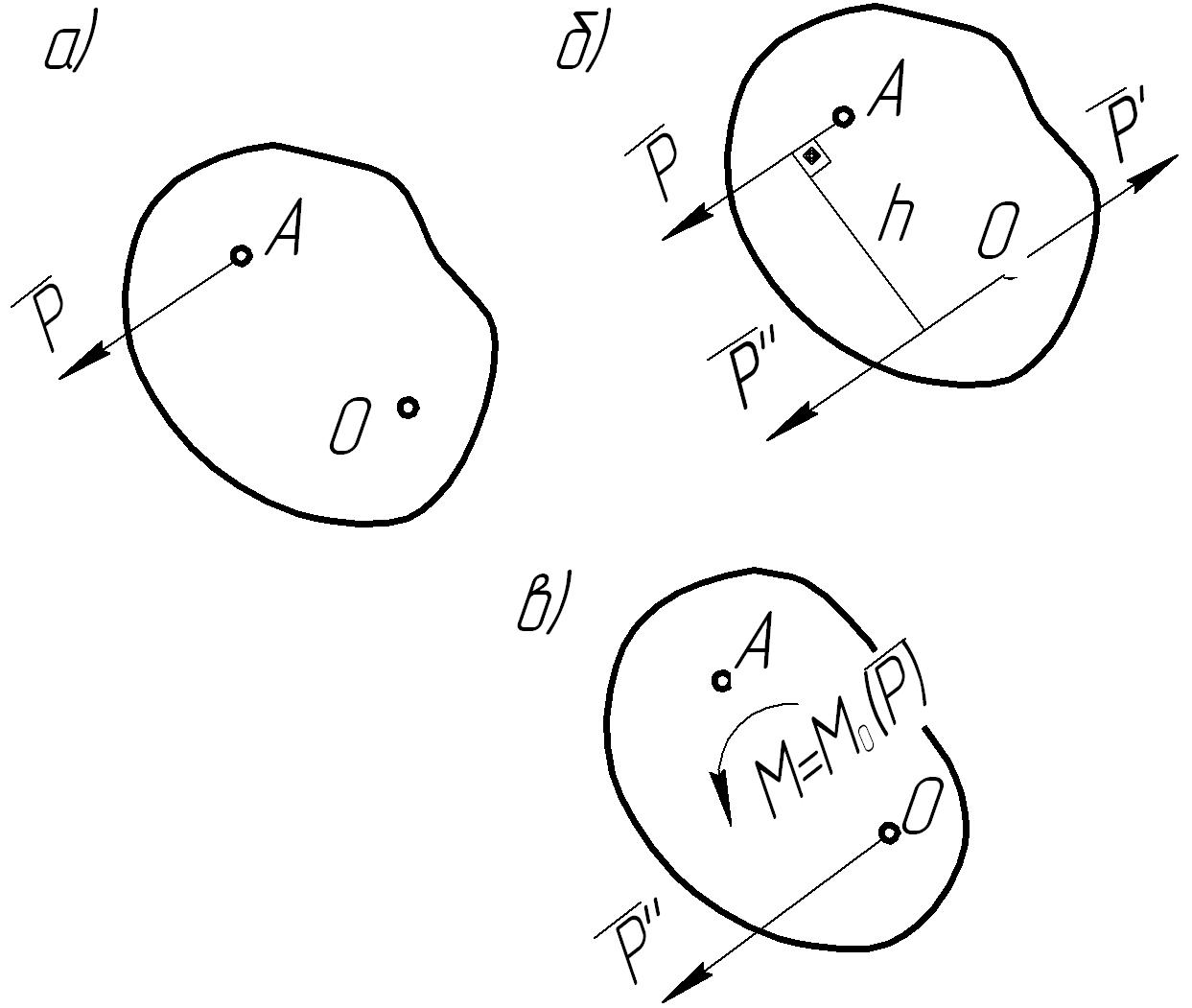
Рис. 16. Приведение силы в точку О.
Изложенный метод приведения одной силы к данной точке можно применить к какому угодно числу сил, которые приводятся в одну точку. Сходящиеся в этой точке силы заменяем одной силой ( ), которая является геометрической суммой этих сил и называется главным вектором системы сил. По аналогии с главным вектором получаем главный момент системы (Мг) относительно точки приведения, складывая алгебраически моменты присоединенных пар.
Таким образом, плоская система сил может быть заменена эквивалентной ей системой, состоящей из одной силы и одной пары сил. Очевиден факт, что система сил находится в равновесии, когда главный вектор системы сил ( )и главный момент системы (Мг) равны нулю. Это условие называется условием равновесия плоской системы сил.
Глава 2. Основы сопротивления материалов
2.1. Деформация тел под действием внешних сил
На все детали машин и сооружений во время их работы действуют различные внешние силы. При определении величины и направления таких сил, приложенных к телам, находящимся в равновесии, обычно делается допущение, что все тела абсолютно твердые, т. е. недеформируемые. Об этом говорилось выше в разделе «СТАТИКА».
В действительности тела под действием приложенных к ним сил в той или иной степени меняют свою форму и размеры, т. е. деформируются. Различают упругую и остаточную деформации. Деформация, полностью исчезающая после прекращения действия внешних сил, называется упругой. Если после снятия нагрузки тело не восстанавливает прежней формы, то говорят об остаточной (пластической деформации).
Характер деформации (упругая или остаточная) зависит от величины силы, действующей на тело, размеров тела и механических свойств его материала Мы будем знакомиться с деформацией тел наиболее простой формы. Таким телом является прямолинейный брус — тело с прямой осью, у которого длина больше поперечных размеров. Для упрощения расчетов мы будем считать, что сам брус не имеет массы. . В зависимости от направления действия сил, приложенных к телу, могут возникать различные виды деформаций: растяжение, сжатие, сдвиг, кручение, изгиб.
Деформация растяжения или сжатия возникает в том случае, когда внешние силы направлены по одной прямой (вдоль оси бруса) в разные стороны (рис. 17, а, б). Если на брус действуют внешние силы, стремящиеся сдвинуть одну
часть его относительно другой, то возникает деформация сдвига (рис. 17, в).
Если брус находится под действием нагрузок, создающих противоположные пары сил в плоскостях, перпендикулярных продольной оси бруса, то появляется деформация кручения (рис. 17, г). И, наконец, две равные пары сил разного знака создают деформацию изгиба (рис. 17, д).

Рис. 17. Виды деформаций:
а — растяжение ; б—сжатие; в — сдвиг; г —кручение; д — изгиб.
Чтобы любая деталь машины была работоспособна, т. е. могла работать безопасно и быть достаточно долговечной, она не только не должна разрушаться от действия на нее рабочих усилий, но и деформации, возникающие в ней при этом, должны быть весьма малыми и обязательно упругими. Определить минимальные размеры детали, необходимые для обеспечения ее работоспособности в соответствии с действующими на нее нагрузками и свойствами материала, из которого эта деталь изготовлена, можно методами, изучаемыми в разделе технической механики– «Сопротивление материалов».