

2.2. Линеаризация нелинейных уравнений
Рис. 2.3. Искажения выходного
сигнала,
вызванные
нелинейностью характеристики
“вход-выход” усилителя
Ситуация изменится, если входной сигнал подать на вход усилителя на фоне постоянного пьедестала - напряжения смещения Есм (рис. 2.4) так, чтобы размах сигнала не выходил за пределы практически линейного участка а-в.
Рис.
2.4. Подача входного сигнала на
постоянном
пьедестале – напряжении
смещения
В принципе для любого нелинейного элемента с характеристикой “вход-выход”
y=F(x)
для малых приращений относительно некоторого начального значения функции
y0=F(x0)
связь “вход=выход” может быть заменена линейной (рис. 2.5) связью для приращения
y=kx, (2.3)
Рис.
2.5. Замена нелинейной зависи-
мости
y=F(x)
линейной для малых
приращений y=kx
относительно
исходного значения
y0
,
x0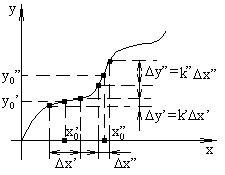
Хотя уравнение (2.3.) выглядит как линейное, оно называется линеаризованным, так как коэффициент уравнения k не является постоянной величиной, а зависит от начального значения y0 функции
k=f (y0 ).
Замена нелинейной связи y=F(x) линейной для приращений
y=kx
относительно некоторого исходного значения функции y0=F(x0) называется линеаризацией.
Значения y0, x0 называются режимом покоя нелинейного элемента. Поскольку коэффициенты линеаризованного уравнения (в том числе и дифференциального), а следовательно, и параметры устройства зависят от режима покоя - это понятие очень важно для электроники, а оптимальный выбор режима покоя является достаточно сложной оптимизационной многопараметровой задачей, поскольку характер зависимости отдельных параметров элемента от режима покоя может быть диаметрально противоположным.
Математически переход от нелинейного уравнения к линеаризованному осуществляется путем разложения нелинейной функции в ряд Тейлора в окрестности режима покоя с удержанием в этом разложении только приращения первого порядка.
Для электронного двухполюсника, описываемого на постоянном токе нелинейным уравнением
U=F(i), (2.4)
линеаризованное уравнение примет вид
![]() (2.5)
(2.5)
Очевидно, что коэффициент k уравнения (2.5) имеет размерность сопротивления, которое принято называть дифференциальным сопротивлением или сопротивлением для приращений
U=ri. (2.6)
Переход от нелинейного уравнения (2.4) к линеаризованному (2.6) позволяет при анализе цепи для приращений заменить нелинейный двухполюсный элемент резистором, сопротивление r которого должно быть определено из статического режима.
Рассмотрим пример использования линеаризации для решения конкретной задачи.
На рис. 2.6 изображена схема, содержащая нелинейный элемент НЭ с характеристикой
Рис. 2.6. Нелинейная
цепь
В схеме действуют два источника - постоянная ЭДС Е и переменный сигнал Uc(t) произвольной формы. Необходимо определить значение тока ic(t), потребляемого от источника переменного сигнала.
Допустим, что графоаналитическим методом определено значение постоянного тока I0.