

2.2. Побудова планів механізму і траєкторій окремих точок
Кінематичне дослідження будь-якого механізму графічним або графоаналітичним.методом починають з побудови ряду послідовних можливих його положень, тобто з будови -планів механізму. Планом механізму називається графічне зображення взаємного положення ланок, яке відповідає вибраному моменту часу. Зображення планів механізму дає можливість прослідкувати за рухом як усього механізму, будь-якої його ланки, побудувати траєкторії точок, розташованих на будь-якій ланці, знайти крайні положення механізму.
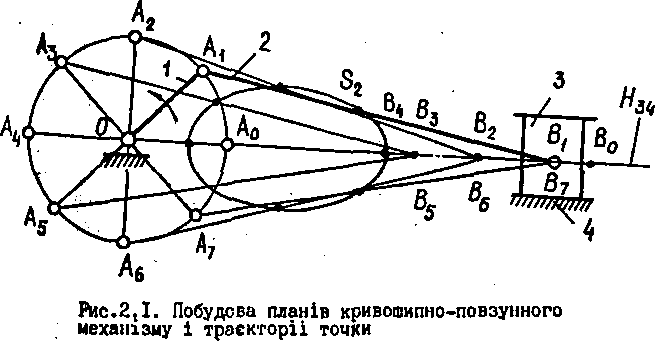
Рис. 2.1. Побудова планів кривошипно-повзунного
механізму і траєкторії точки
Для побудови планів механізму задаємо довжину відрізка ОА в міліметрах, яким будемо зображати на рисунку кривошип ОА Визначаємо масштабний коефіцієнт
Знаходимо довжини відрізків (в міліметрах) на рисунку:
Підкреслимо, що значення величин Loa,Lab,Las2 є дійсні розміри ланок в метрах, а відстані ОА , AВ , AS2- довжини відрізків, на рисунку в міліметрах. В подальшому відрізки на рисунках будемо позначати двома літерами з лінією над ними.
За початкове положення механізму, як правило, вибирають ог. не з його крайніх положень. Нехай таким с положення, коли криве шип і шатун витягуються в одну ліній ОА0 В0 . При цьому повзуь З знаходиться в верхній мертвій точці, яка віддалена від точки 0 на відстань І оa + 1АВ . Траєкторією точки А поділимо на довільно вибране число рівних частин, наприклад, на 8, як це показано на рис.2.1. Точки поділу позначаємо А0, А1, А2 і т.д у напрямі обертання кривошипа. Перехід механізму з одного положення в інше здійснюється за час Т/8, де Т - період обертання кривошипа ( Т = 60 / n ,С ; п - частота обертання кривошип хв. _), Під періодом Т (або циклом) руху розуміють проміжок ча су, після закінчення якого механізм повертається у початкове положення, а Рого кінематичні параметри набувають початкового зна чення.
Положення точки В знаходимо методом дугових засічок. Для цього з одержаних точно Ао , 'Аі ,- А2 і т.д. радіусом АВ робим: дугові засічки на траєкторії точки- В , у результаті чого знахо димо точки Во ,В1 , Вг і т.д. З'єднавши відповідні точки А і В відрізками АВ , одержимо положення шатуна та повзуна. Точна В4 , яка віддалена від точки 0 на відстань Lab-Loa , називається нижньою мертвою точкою. Відстань S/max між верхньою і нижньою мертвими точками е максимальним ходом повзуна (точки В }
Таким самим способом будуємо траєкторією точки S2, яка лежить на шатуні 2. Дня цього з точок А0 А1 , Аг і т д радіусом А5з робимо дугові засічки на відповідних положеннях шатуна- які визначають точки 5г . Послідовно з’єднавши точки 52 плавної кривою, одержуємо траєкторію цієї точки. Через те, що точха лежить на татуні, її траєкторію називають шатунною кривою.