

1.9. Заміна у плоских механізмах вищих пар нижчими
Плоскі механізми можуть мати як нижчі, так і виці кінематичні пари. У плоских механізмах виці пари е парами 2-го роду. Визначити структуру механізму з парами 2-го роду, тобто поділити його на структурні групи, можна лише після заміни пар 2-го роду парами 1-го роду. При цьому мас задовольнятися умова структурної еквівалентності, тобто щоб замінний механізм мав такий самий ступінь вільності, як і вихідний механізм, і щоб характер миттєвого відносного руху всіх Рого ланок не змінився.
На-рйс.І.ЗІ
зображений триланковнР механізм із
двома обертальними кінематичними
парами 0
і С
і
однією парою 2-го роду, яку утворюють'ланки
І і 2. Профилями цих ланок.в кола радіусів
АК
і
ВК;
Тoчка
К
дотику
проіілей під час руху механізму змінне
своє положення як на нерухомі# площині,
так і на профілях ланок. Оанак, при цьому
відстань між точками А
і В
не
змінюється. Тому цей механізм
еквівалентний шарнірному чотцриланковому
(рис.І.ЗІ,б),
у якого довжини ланок ОА
*АВ,
ВС
дорівнюють
довжинам
відповідних
відрізків на рис.І.ЗІ<а.Замінний
иеханіамОАВС
е
еквівалентним даному також і з точки
зору законів руху ланок 1
і 2, 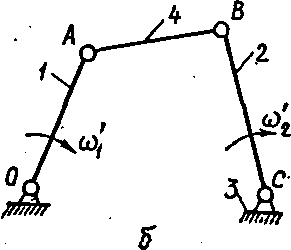 бо.кутові
швидкості цих ланок в обох механізмах
однакові( w’1
= w1
, w’2
= w2)
бо.кутові
швидкості цих ланок в обох механізмах
однакові( w’1
= w1
, w’2
= w2)
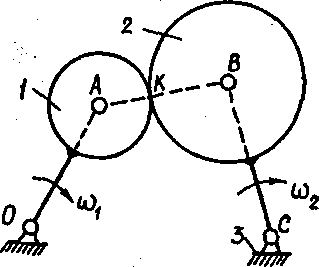
утвореною ланками з криволінійними профілями:
в - схема механізму; б - замінний механізм
Якщо профілями ланок, які утворюють вищу пару, будуть криві змінної кривизни, то кожному положення механізму буде відповідати один "миттєвий" замінний механізм, у якого точки А і В будуть центрами кривизни, а відрізки АКі ВК - відповідними радіусами кривизни криволінійних профілей.
Таким чином, еквівалентом кінематичної пари 2-го роду, утвореної ланхами з криволінійними профілями, є одна ланка, шо входить до складу двох обертальних пар 1-го роду, розташованих в центрах кривизни криволінійних профілей.
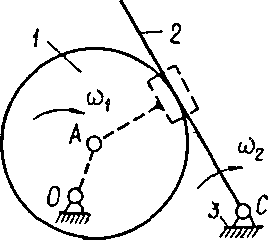
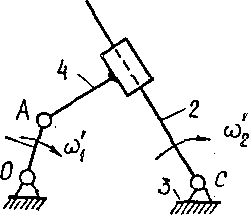
Якщо у плоскому механізмі одна із двох ланок, які утворюють пару 2-го роду, має криволінійний профіль, а друга - прямолінійний (рис.1.32), то центр кривизни другого (прямолінійного) профілю нескінченно віддалений. Тому в замінному еквівалентному механізмі додаткова ланка 4 буде утворювати з ланкою 2 не обертальну, а поступальну кінематичну пару, яку можна розміщувати в будь- якому місці прямолінійного пробіл» (рис.1.32,6).
 а
б
а
б
Рис. 1.32. Триланковий механізм з вищою кінематичною парою,
утвореною ланками а криволінійним та.прямолінійним профілями:
а - схема меланізму; б - замінний механізм
Отже,еквівалентом вищої кінематичної пари, утвореної ланками з криволінійним та прямолінійним профілями, с одна ланка а обертальною та поступальною кінематичними парами. Обертальна пора розміщується у центрі кривизни криволінійного профілю, а поступальна - в будь-якому місці прямолінійного профілю.
2. Кінематичне дослідження плоских важільних механізмів
2.1. Задачі та методи кінематичного дослідження механізмів.
Поняття про масштабний коефіцієнт
При кінематичному'дослідженні механізмів розглядається рух їхніх ланок без урахування діючих сил, тобто рух ланок розглядається з чисто геометричної сторони, з урахуванням тільки фактора часу.
Із теоретичної механіки відомо, що будь-який рух тіла характеризується переміщенням його у просторі, швидкістю та прискоренням руху його точок. Звідси і випливають основні задачі кінематичного дослідження механізмів:
побудова планів механізму і визначення положень його ланок; побудова траєкторій окремих точок і знаходження радіуса кривизни в будь-лкіР точці траєкторії; визначення переміщень окремих ланок і знаходження крайніх положень механізму;
визначення лінійних швидкостей та прискорень окремих точок механізму;
визначення кутових швидкостей та прискорень ланок механізму.
В результаті такого дослідження встановлюють відповідність кінематичних параметрів (переміщень, швидкостей і прискорень; заданим умовам роботи механізму, а також одержують вихідні дані для виконання подальших розрахунків. Знання кінематичних параметрів потрібне для визначення динамічних навантажень: сил інерції, мо- яентів пар сил інерції , кінетичної енергії та потужності механізму. Траєкторії окремих точок і крайні положення механізму допомагають встановити картину взаємного положення ланок під час руху, усунути можливість їхніх співударів, визначити робочий хід ланок тощо.
Існують чотири методи кінематичного дослідження механізмів: графічний, графоаналітичний, аналітичний та експериментальний.
Найбільшого поширення в інженерній практиці набули графічні та графоаналітичні методи дослідження. Вони порівняно прості у виконанні, наочні, мають достатню для інженерних розрахунків точність.
-При використанні графічного методу дослідження будують діаграми лініРних або кутових переміщень точок чи ланок механізму залежно від часу або від кута повороту початкової ланки. Маючи
такі діаграми, методом графічного диференціювання визначають швидкості та прискорення точок чи ланок в будь-якому положенні механізму і будують діаграми швидкостей та прискорень у функції часу чи кута повороту початкової ланки.
При застосуванні графоаналітичного методу будують плани швидкостей та прискорень, які дозволяють визначити не тільки зн чення, але й напрям швидкостей і прискорень заданих точок чи ла нок механізму.
Останнім часом у зв’язку з появою електронних обчислювальн машин (ЕОМ) значного поширення набули більш складні аналітичні методи дослідження. Вони дозволяють одержувати багатоваріантні рішення і тим самим вибирати при проектуванні такі схеми механі мів і розміри їхніх ланок, які забезпечують оптимальні умови рс боти.
Експериивнтвльн і методи використовують при проведенні наук во-дослідних експериментальних робіт.
При використанні графічних методів дослідження побудову пл ні в механізмів, планів швидкостей та прискорень здійснюють у пе ному масштабі. Для цього використовують масштабний коефіцієнт.
Масштабним коефіцієнтом називається відношення фізичної ве личини (довжини, швидкості, прискорення тощо) до довжини відріз ка, який зображав цю величину на рисунку. Масштабний коефіцієнт позначають літерою К з індексом тієї величини, яку зображено графічно. Наприклад, масштабний коефіцієнт довжини позначається Кi . масштабний коефіцієнт швишостей - Ку, масштабний коефіцієнт прискорень Ka Масштабний коефіцієнт має розмірність, у чи сельнику якої - розмірність величини, яка зображується, а у знаменнику - розмірність довжини в міліметрах. Отже, коефіцієнт К1 має розмірність - м/mм, коефіцієнт Ку-мс/мм тошо. Якщо, наприклад, швидкість точки АУа - 5м сек зобразити на рисунку відрізком ра= 100 мм, то масштабний,коефіцієнт швидкостей .