

1.8. Синтез чотириланкових важільних механізмів
Будь-який важільний механізм можна утворити шляхом послідовного або паралельного приєднання групи початкових ланок кінематичних ланцюгів з нульовим ступенем вільності, тобто груп Ассура. Чотириланкові механізми утворюються шляхом приєднання до групи початкових ланок різних діад (груп Ассура 1 класу). Одним із найпростіших таких механізмів в шарнірний чотириланковий механізм (рис.1.30.а). який утворений приєднанням діади N1 (ланки 2 і 3) до групи початкових ланок (ланки І і 4). Цей механізм може бути кривошипн-коромисловим, двокривошипним та двокоромисловим.
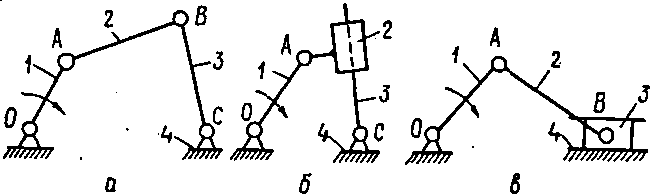
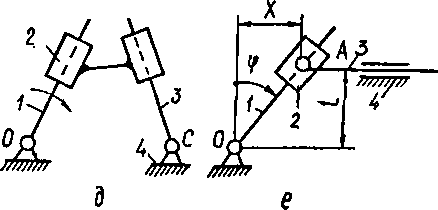
Рис.1.30. Чотириланкові механізми: а - чотирьохшарнірний; б - кулісний; в - кривошипно- гювзуииии; г - подвійного повзуна (синусний); д - двокулісний; е - кулісно-повзуниий (тангенсний)
У кривошипно-коромисловому механізмі кривошипом може бути найкоротша ланка за умови, що сума довжини найкоротшяї та най- довшої ланок менша за суму довжин двох інших ланок (правило Грас гофа). При цьому байдуже, де розміщена найдовша ланка: вона може бути стояком ОС, шатуном АВ або коромислом ВС.
Кривошипно-коромисловий
механізм зустрічається у металорізальних
верстатах, пресах, ковальських,
текстильних, поліграфічних,
сільськогосподарських та інших машинах,
у багатьох приладах Якщо стояком
шарнірного чотириланкового механізму
зробити найкоротшу ланку або якщо ланки
І та 3, а також ланки 2 та 4 мають однакову
довжину і утворюють паралелограм
(див.рис.І.1 7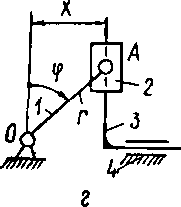 механізм
буде
двокривошипним,
оскільки ланки І. і 3 матимуть можливість
обертатися
на повний оберт. Двокривошипні
паралелаграмні механізми використовуються,
наприклад» в локомотивах
механізм
спарника
для передачі
обертального руху веденим колесам або
в приладах для креслення.
механізм
буде
двокривошипним,
оскільки ланки І. і 3 матимуть можливість
обертатися
на повний оберт. Двокривошипні
паралелаграмні механізми використовуються,
наприклад» в локомотивах
механізм
спарника
для передачі
обертального руху веденим колесам або
в приладах для креслення.
Якщо найкоротшою ланкою шарнірного чотириланковика є шатун АВ, то механізм буде двокоромисловим. Цей механізм використовується, наприклад, у портальних кранах.
При приєднанні до групи початкових ланок діади № 2 одержуємо кулісний механізм (рис,30,б), у якого ланка 3 с кулісою. Залежно від довжини кривошипа ОА та міжосьової відстані ОС куліса може здійснювати або зворотно-коливальний рух (якщо ОА < ОС ), або обертальний (якщо ОА>ОС) Огже, кулісний механізм може бути однокривовипним або двокривошипним, Використовуються кулісні механізми в металорізальних верстатах, гідравлічних і пневматичних приводах, у Літаках для управління створками люків та підйому і випуску стоск шасі тощо.
Якщо до групи початкових ланок приєднати діаду № 3, то одержимо широко розповсюджений кривошипно-повзунний механізм (рис1.30,а,в), який використовується в двигунах внутрішнього згоряння, поршневих компресорах, пресах, поршневих насосах, різноманітних приладах тошо.
Приєднуючи до групи початкових ланок діаду Р 4, можна одержати або двокулісний механізм (рис.І.30,г,д), або механізм подвійного повзуна (синусний механізм, рис.І.30,д). У двокулісному механізмі кутової швидкості ланок І і 3 однакові, а тому цей механізм може передавати рух між двома ексцентрично розташованими валами і використовується в муфтах Ольдгейма.
У синусному механізмі обертальний рух кривошипа 4 перетворюється у зворотно-поступальний рух повзуна 3. При цьому переміщення повзуна пропорційне - синусу кута повороту кривошипа( Х = rsinf )
механізму, утвореного шляхом приєднання до групи початкових ланок діади Р 5 зображена на рис.І.ЗО,е. У цьому механізмі переміяення порзуна 3 пропорційне тангенсу кута повороту куліси І (X=t tgf) , а тому він називається тангенсним механізмом. Використовується порівняно рідко, оскільки ланка І може обертатися на кут, менший 180