

1.6. Пасивні в’язі. Раціональні механізми
У механізмі можуть бути пасивні (зайві) в’язі, які не впливають на кінематику механізму, але визивають статичну невизначеність. Суть пасивної в'язі можна пояснити на прикладі вала турбіни авіаційного двигуна, який встановлений в точках А та В на радіально-упорні підшипники (рис.1.20)- Ці підшипники в осьовому напрямку накладають на вал тотожні в’язі. З точки зору кінематики одна з них непотрібна. При цьому має місце статична невизначеність, тому що методами статики неможливо визначити осьові складові їх реакцій ( можна знайти їхню суму). При визначенні числа ступенів вільності механізму пасивні в’язі повинні бути виключені із загальної кількості вязів.
Механізм з пасивними в'язями (q >0) при неточному їхньому виготовлені не-
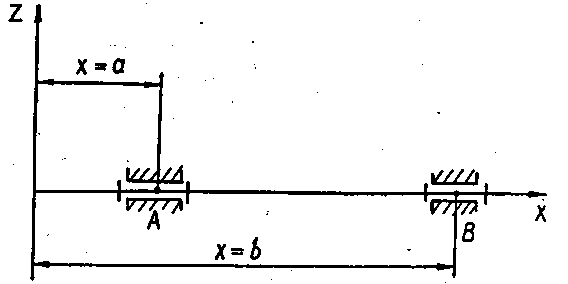
Рис.1.20. Вал турбіни авіаційного двигуна з пасивними в’язами
можливо зібрати без деформації ланок. Тому такі механізми потребують підвищено: точності виготовлення. У противному разі в процесі складання ланки механізму будуть деформуватись, що викличе навантаження кінематичних пар та ланок значними додатковими силами подна тих що визиваються зовнішніми силами . У наведеному вище прикладі це здійсниться тоді, коли відстань (b-а) між підшипниками буде більшою чи меншою, ніж відстань між спеціальними виступами на валу (буртиками), призначеними для фіксації вала. Крім того, при недостатній точності виготовлення механізму з пасивними в’язями тертя в кінематичних парах маже значно збільшитись та привести до заклинювання ланок або ж до зменшення ресурсу механізму. З цієї точки зору пасивні в'язі в механізмах не бажані.
Однак у багатьох випадках доводиться свідомо проектувати та виготовляти статично невизначені механізми з пасивними в’язями для забезпечення потрібної міцності та жорсткості.
Механізми, в яких відсутні пасивні в’язі, називаються раціональними. В подальшому, розглядаючи різні види пасивних в’язів, будемо вказувати можливі способи їхнього усунення, тобто проектування раціональних механізмів.
Слід відрізнити пасивні в’язі у кінематичних парах і у кінематичних ланцюгах механізму. Так, наприклад, стійка шасі літака Ан-24 (рис.1.21) створює з фюзеляжем однорукому обертальну пару А, по цілком достатньо з точки зору кінематики. Однак, враховуючи наявність великих бокових сил, а також зазорів, жорсткість
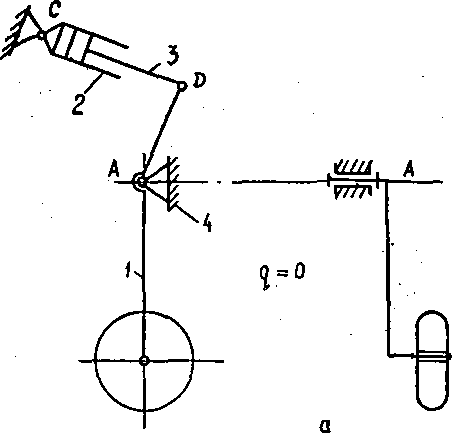
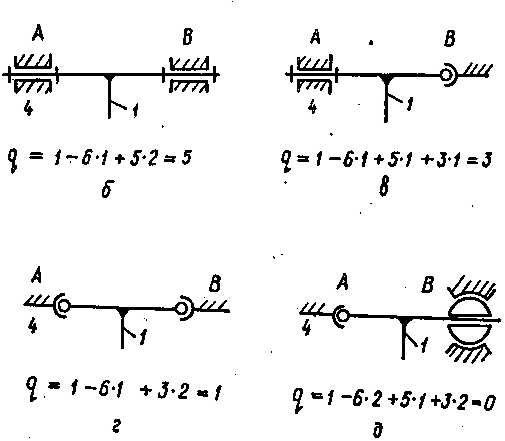
Рис.1.21. Схема стійки шасі літака (а) та варіанти виконання опор А і В
з пасивними в’язами (б, в, г) і без пасивних в’язів (д)
стійки в бовокому напрямку буде явно недостатньою. У зв’язку а цим для стійки необхідно передбачити другу рухому опору В. Якщо обидві опори (А.В) будуть однорухомими парами (рис.1.21,б), то система буде явно статично невизначеною. Число пасивних в'язів визначається за формулою
![]()
Оскільки в цьому випадку W = 1, n - 1 =1, р1 = 2, то q=1-61+52=5, тобто таке рухоме з'єднання стійки та фюзеляжу буде мати п'ять пасивних в’язів. Це вимагає високої точності виготовлення та монтажу опор. Якщо прийняти до уваги ще той факт, що деформації фюзеляжу в точках А і В будуть не ідентичними, то це це в більшій мірі збільшить негативний вплив пасивних в’язів. Щоб побудувати більш раціональну опору стійки за рахунок зменшення числа пасивних в'язів, необхідно підвищити рухомість кінематичних пар. Це загальне правило.
Структурну оптимізацію опори можливо прослідити за рис.1.21 де наведені різні варіанти використання тих чи інших кінематичних пар та визначено для кожного варіанта число пасивних в’язів. Аналізуючи наведені на рис.1.21 варіанти рішень, приходимо до висновку, що найбільш раціональним рішенням з’єднання стійки ш, шасі з фюзеляжем с рішення, зображене на рис.1.21 ,д при якому число пасивних в’язів q = 0.
Відносно пасивних в'язів у кінематичних ланцюгів механізму можна вказати два інших вида:
пасивні в'язі, викликані наявністю у кінематичних ланцюгах надмірних (зайвих )ланок;
пасивні в'язі, викликані не ідеальністю плоских механізмів.
Загальних методик визначення та усунення пасивних в'язів у кінематичних ланцюгах механізму поки йо не існує, тому розглянемо це питання на конкретних прикладах. Як механізм з надмірними ланками можна розглядати механізм підйому та випуску закрилка літака (рис.1.22).
Оскільки довжина закрилка 3 в напрямку, перпендикулярному площині рисунка, значна, то приведення його в рух за допомогою одного шатуна 2 і двох повзунів 4 та 5 буде важким. Можливий перекіс закрилка в направляючих і як наслідок - його заклинювання. Щоб уникнути цього, введемо у кінематичний ланцюг три додаткові ланки (2', 4', 5'). Встановлення додаткової ланки 2'

Рис. 1.22. Схема механізму підйому та випуску
закрилка літака
можливе тільки при умові рівності її довжини - довжині ланки 2, цо потребує підвищеної точності виготовлення. Проаналізуємо цю схему механізму з точки зору наявності пасивних в’язів. І оскільки робиться спроба з’ясувати вплив надмірних ланок на наявність пасивних в’язів, то будемо вважати, що механізм ідеально плоский і в кінематичній парі пасивні в’язі відсутні. У цьому випадку W=1,n-1=8 i p1=13. Отже, за формулою Чебишева одержимо:
![]()
Тобто, механізм є статично невизначеним, так як має три павивних в’язі. Щоб уникнути пасивних в’язів, необхідно збільшити рухомість деяких кінематичних пар. Наприклад, зробимо кінематичні пари В, С, Д не однорухомимми, а дворухомими. Дійсно, у цьому випадку число пасивних в’язів буде дорівнювати:
![]()
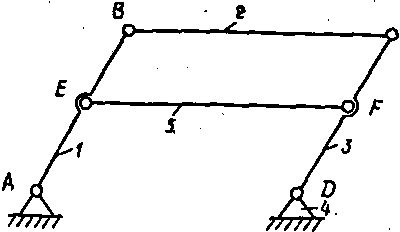
Пасивні в’язі такого виду інколи навмисно вводять до складу механізму для підвищення жорсткості чи для усунення невизначеності руху ланок в деяких положеннях. Так, наприклад, механізм подвоєного паралелограма (рис.1.23) не може в мертвому положенні , коли всі ланки витягуються в одну лінію , перетворитися в механізм антипаралелограма, тобто механізм, у якого ланка СД із цього положення починає обертатися в протилежний бік. Така можливість привела б до поломки механізму.
Розглянемо пасивні в’язі, які виникають в зв’язку з неідеальністю плоского механізму. Суть цього виду пасивних в'язів продемонструємо, розглянувши механізм авіаційного повітряного компресора (рис.1.24,а). Якщо вважати цей механізм ідеально
що вносить додаткові пасивні в’язі
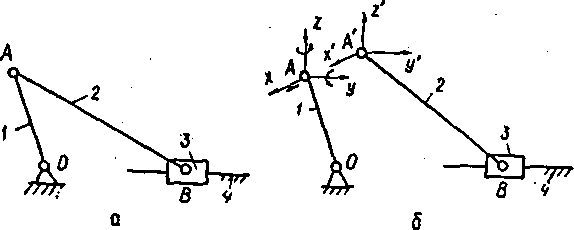
його складання при наявності пасивних в’язів (б) та варіанти
усунення пасивних в’язів (в,г)
плоским і врахувати, що W= 1, n - 1 = 3, р1= 4, то число пасивних в’язів буде дорівнювати q = 1-3·3+2·4, тобто пасивні в’язі відсутні. Це однак можливо тільки при ідеальному виготовленні, що практично не можливо. В результаті неточності виготовлення та монтажу цей .механізм з чотирма однорухомими парами стає просторовим. Для визначення числа пасивних в'язів необхідно використати формулу Малишева, що дасть q = 1-6·3+ 5·4 =3, тобто в механізмі реально мають місце три пасивних в'язі. Зібрати такий механізм без деформації ланок неможливо. Дійсно, складання кінематичних ланцюгів з ланок 2, 3, 4 і окремо з ланок 1, 4 (рис.1.24,б) не викличе складнощів. Однак, зібрати обертальну пару А, яка утворюється ланками 1 та 2, буде можливим лише при умові суміщення системи координат A X Y Z і A' X' Y' Z'. Для цього необхідно здійснити кутові деформації ланки 2 навколо осей Y і Z, (показані стрілками) та лінійне переміщення точки А вздовж осі X до суміщення з точкою А. Сказане підтверджує, що в цьому механізмі реально існує три пасивні в'язі.
Для
того, щоб цей просторовий механізм був
статично визначеним (
q=0
),
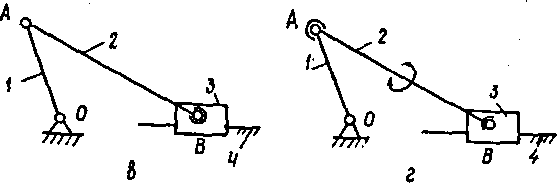
потрібна інша структурна сxема,
наприклад, така, що
зображена на рис.1.24,в,
де W=1,
p1=2,
p2=1,
p3=1
![]() .
.
Можливий
варіант механізму (рис.1.24,г)
з двома сферичними парами А та В. У цьому
випадку р1
= 1,
р3
=
2, а
![]() .
Одержаний
результат q
=
-1
свідчить про те, що пасивні в’язі
відсутні,
і
більше того,
ма’
місце зайвий ступінь вільності місцевий,
локальний , який викликаний можливістю
обертання шатуна 2 навколо своєї осі
АB.
Ця рухомість не впливає на закон руху
механізму і може бути навіть корисною
з точки зору вирівнювання зносу шарнірів
А і В, оскільки шатун може самовільно
обертатися навколо своєї осі за рахунок
змінних динамічних навантажень і
вібрацій.
.
Одержаний
результат q
=
-1
свідчить про те, що пасивні в’язі
відсутні,
і
більше того,
ма’
місце зайвий ступінь вільності місцевий,
локальний , який викликаний можливістю
обертання шатуна 2 навколо своєї осі
АB.
Ця рухомість не впливає на закон руху
механізму і може бути навіть корисною
з точки зору вирівнювання зносу шарнірів
А і В, оскільки шатун може самовільно
обертатися навколо своєї осі за рахунок
змінних динамічних навантажень і
вібрацій.
Слід відмітити ще ту обставину, що цей аналіз провадився без урахування зазорів в кінематичних парах, які підвищують рухомість кінематичних пар, в результаті чого вплив пасивних в'язів дещо зм’якшується.