

1.2. Класифікація кінематичних пар
Кінематичні пари класифікують за такими ознаками:
за числом незалежних між собою можливих рухів однієї ланки відносно іншої, тобто за числом ступенів вільності у відносному русі ланок, які утворюють кінематичну пару;
за числом умов зв’язку, які накладаються кінематичною парою на відносний рух ланок, тобто за числом втрачених ланкою рухів при її входженні в кінематичну пару;
за формою елементів ланок, що утворюють кінематичну пару.
За класифікацією В.В.Добровольского (1880-1957) залежно від числа можливих незалежних між собою рухів однієї ланки відносно іншої кінематичні пари діляться на п’ять родів: 1-го роду (однорухомі), 2-го роду(дворухомі), 3-го роду (трирухомі), 4-го роду (чотирирухомі), 5-го роду (п’ятирухомі).
Таким чином, рід кінематичної пари визначається числом можливих незалежних рухів однієї ланки відносно іншої, тобто числом ступенів вільності у відносному русі ланок.
З курсу теоретичної механіки відомо, що вільне абсолютно тверде тіло, що рухається у просторі, має шість ступенів вільності (рис.1.2). Таке тіло (ланка 1) може виконувати три обертальні рухи навколо осей Х,Y,Z, та три поступальні рухи вздовж цих самих осей. Входження ланок у кінематичну пару накладає на їхній відносний рух певні умови зв’язку, тобто обмеження у русі однієї ланки відносно другої. Число таких умов зв'язку, тобто число втрачаємих ланкою рухів, може змінюватись у межах від 1 до 5. При цьому число можливих рухів ланки зменшується на відповідне число умов зв’язку і також може змінюватись у межах від 1 до 5. А тому і рід кінематичної пари змінюється в таких же межах.
Розглянемо приклади кінематичних пар. На рис.1.3 показана кінематична пара "куля-площина", Зона є парою 5-го роду, оскільки куля (ланка 1) відносно площини (ланка 2) може виконувати п’ять незалежних рухів: три обертальні рухи навколо осей Х,Y, Z та два поступальні рухи вздовж осей X і Z
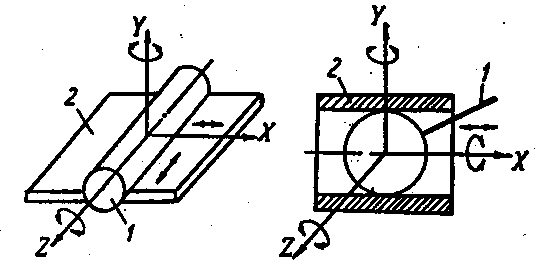
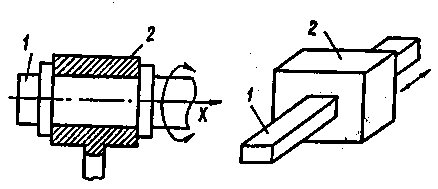
На рис.1.4 зображені кінематичні пари "циліндр-площина" (рис.І.4,а) та "куля-циліндр" (рис.І.4,б) . Вони є парами 4-го роду, оскільки в них ланка 1 відносно ланки 2 має чотири ступені вільності. В парі "циліндр-площина" ланка 1 (циліндр) відносно ланки 2 (площини) може обертатись навколо осей Y і Z та рватись поступально вздовж осей X і Z. .В парі "куля-циліндр" ланка 1 (куля) відносно ланки 2 (циліндра) може виконувати три обертальні рухи навколо осей Х,Y,Z та один поступальний рух вздопж всі Z.

Рис. 1.2 Можливі рухи вільної ланки у просторі
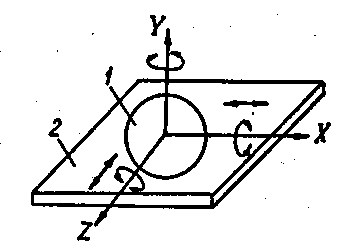
Рис. 1.3. Кінематична пара 5-го роду (куля - площина)
а б
Рис. 1.4. Кінематични пари 4-го роду:
а – циліндр – площина; б – куля – циліндр
а б
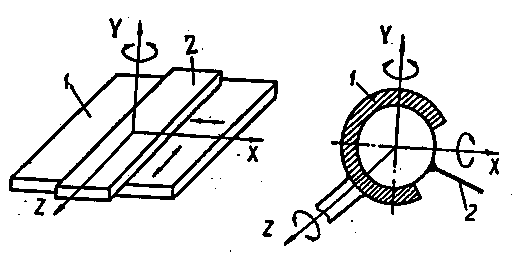
Рис.1.5. Кінематичні пари 3-го роду:
а – площина; б – сферична
а б
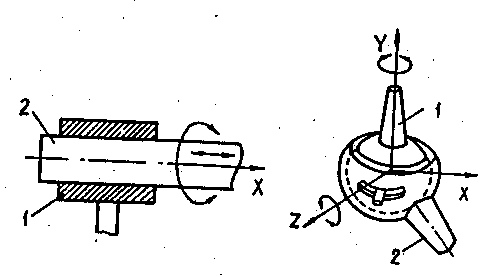
Рис. 1.6. Кінематичні пари 2-го роду:
а – циліндрична; б – сферична с пальцем
а б
Рис. 1.7. Кінематичні пари 1-го роду:
а – обертальна; б – поступальна
Приклали кінематичних пар 3-го роду показані на рис.1.5, 2-го роду - на рис.1.6. та 1-гo рoду на рис.1.7. Можливі рухи однієї ланки відносно-другої вказані стрілками.
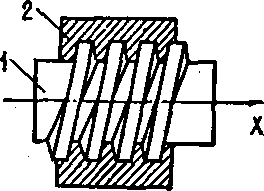
Слід зазначити, oо можливі рухи однієї ланки відносно другої можуть бути або незалежними один від одного, або зв’язаними один з одним будь-якими додатковими геометричними умовами. Наприклад, у гвинтовій парі (рис.1.8) поворот гвинта (ланка 1) відносно гайки (ланка 2), або, навпаки, ланки 2 відносно ланки І на певний кут викликає переміщання цієї самої ланки вздовж осі X на певну відстань. Але це переміщення ланки є залежним від кута 11 повороту. А числа ступенів кількості ланок кінематичної пари у їхньому відносному русі визначається числом можливих незалежних рухів. Тому гвинтову пару слід віднести до пар 1-го роду, бо е лише один параметр, що визначав положення гвинта в гайці (кут повороту ланки).
 За
класифікацією І.І.Артоболевського (
1905-
1977
) залежно від числа умов зв'язку, тобто
числа обмежень, які накладаються
кінематичною парою на відносний рух
ланок, пари діляться на п'ять
класів;
За
класифікацією І.І.Артоболевського (
1905-
1977
) залежно від числа умов зв'язку, тобто
числа обмежень, які накладаються
кінематичною парою на відносний рух
ланок, пари діляться на п'ять
класів;
Рис.1.8.
Гвинтова кінематична пара (1-го роду)
Із визначення роду та класу кінематичних пар випливає, що кінематична пара 1-го роду за В.В.Добровольским є парою У класу за І І.Артоболевським; кінематична пара 2-го роду - парою ІУ класу тощо.
За класифікацією Ф.Рело (1829-1905 ) залежно від форми елементів ланок кінематичні пари діляться на нижчі та вищі.
Нижчими називаються кінематичні пари, у яких ланки стикаються між собою поверхнями (наприклад, обертальна, поступальна, гвинтова, циліндрична, сферична, сферична з пальцем, площинна).
Вищими називаються кінематичні пари, у яких ланки стикаються по лінії або в точці ( наприклад, куля-площина, циліндр-площина, куля-цилівдр).
Нижчі кінематичні пари можуть передавати більші зусилля, ніж вищі, завдяки більшій площі контакту міх ланками. Проте втрати на тертя у таких парах більші ніж у вищих. Наприклад, втрати на тертя у підшипниках ковзання значно більші, ній у підшипниках кочення.
Розглянуті кінематичні пари можуть бути утворені ланками просторових механізмів, тобто таких механізмів, точки ланок яких рухаються різних непаралельних площинах. У курсі "Теорія механізмів .І машин" будуть розглядатися переважно плоскі механізми, у яких точки всіх ланок рухаються паралельно одній нерухомій площині. У плоских-механізмах кінематичні пари можуть бути тільки 1-го та 2-го родів. Це пояснюється тим, що вільне тверде тіло у плоскому русі мав тільки три ступені вільності: воно може рухатися поступально вздовж осей X і Z та обертатися навколо осі Y При входженні тіла (ланки) у кінематичну пару воно буде втрачати один або два стулені вільності. Тому кінематична пара буде одно- рухомо або дворухомою.
У плоских механізмах пари 1-го роду зпвкди никчі ( обертальні, поступальні, а пари 2-го роду - завжди вищі, причому можливими рухами однієї ланки відносно другої е поступальний та обертальний.
1.3. Умовні зображення кінематичних пар і ланок плоских механізмів
При структурному, кінематичному та динамічному дослідженнях механізми прийнято зображати у вигляді схем.
Схемою механізму називають Його графічне зображення, виконане без масштабу за допомогою умовних позначень ланок та кінематичних пар.
Розрізняють також поняття кінематична схема механізму, на якій розміри ланок наводять у масштабі. На схемах механізмів ланки та кінематичні пари зображають умовно згідно з ГОСТ 2.770-68.
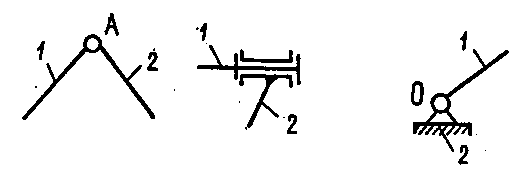
На рис.1.9 показані умовні зображення обертальної кінематичної пари. Центри обертальних пар позначаються великими літерами латинського алфавіту: А, В, С тощо. Ланки позначаються порядковими арабськими цифрами: 1, 2, 3 тощо. Нерухомість ланки показують на схемах штриховкою.
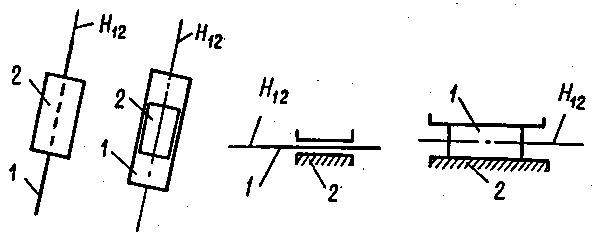
Умовне зображення поступальної кінематичної пари показано на рис.1.10. Напрямну поступальної пари позначають літерами Н з подвійним індексом у відповідності з номерами тих ланок, які утворюють кінематичну пару.
а б
Рис.1.9. Умовні зображення обертальної кінематичної пари:
а – ланки 1 і 2 – рухомі; б – ланка 2 – нерухома
а б
Рис.1.10. Умовні зображення поступальної кінематичної пари:
а – ланки 1 і 2 – рухомі; б – ланка 2 – нерухома
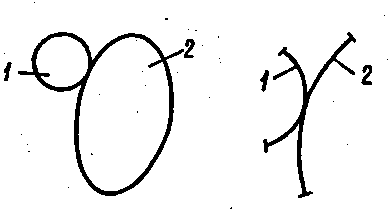
Умовні зображення. плоскої кінематичної пари 2-го роду наведені на рис.I .II. Рис а відповідає тому випадку, коли ланки яри роботі механізму послідовно отикаються одна одної всіма своїми точками (наприклад кулачок і ролик у кулачковому механізмі). ,.кцо ланки стикаються лише на деякій ділянці профілей (наприклад, зуб*я зубчестих коліс), то використовується аображення, показане на рис.1 11,б.
Приклади умовного зображення ланок плоских механізмів наведені на рис.1.12. Ланка, яка входить до складу двох чи трьох кінематичних пар, незалежно від конструктивної форми, зображається у вигляді прямої лінії або трикутника, який може заштриховуватися.
Назви та умовні зображення ланок залежно від їхнього характеру руху та конструктивної форми наведені у табл.1.1 Ці ланки
а б
Рис.1.11. Умовні зображення кінематичної пари 2-го роду:
а – ланки стикаються одна одної всіма точками профілей;
б – ланки стикаються на деякій ділянці профілей
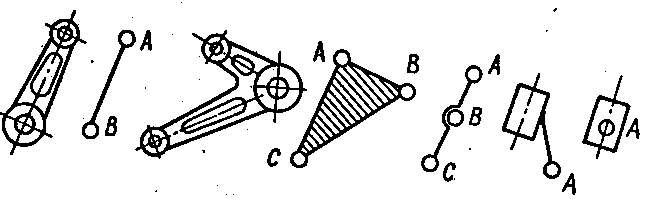
а б в г
Рис.1.12. Умовні зображення ланки:
а – ланка входить у дві обертальні пари; б – ланка входить у три обертальні пари, які не лежать на одній прямій лінії; в – ланка входить у три обертальні пари, які лежать на одній прямій лінії; г – ланка входить до складу обертальної і поступально і кінематичних пар
називають: кривошипом - ланка важільного механізму, яка здійснює повний оберт навколо осі, зв'язаної із стояком; коромислом - ланка важільного механізму, яка здійснює неповний оберт навколо осі, зв'язаної із стояком; шатуном - ланка важільного механізму, яка здійснив плоскопаралельний рух; повзуном - ланка важільного механізму, яка здійсню поступальний рух відносно стояка або іншої ланки; кулісою - рухома ланка ванільного механізму, яка с напрямною для повзуна; кулачком - ланка з криволінійним профілем; зубчастим колесом - ланка із замкненою системою зуб’їв, яка
Таблиця 1.1
Основні типи ланок механізмів
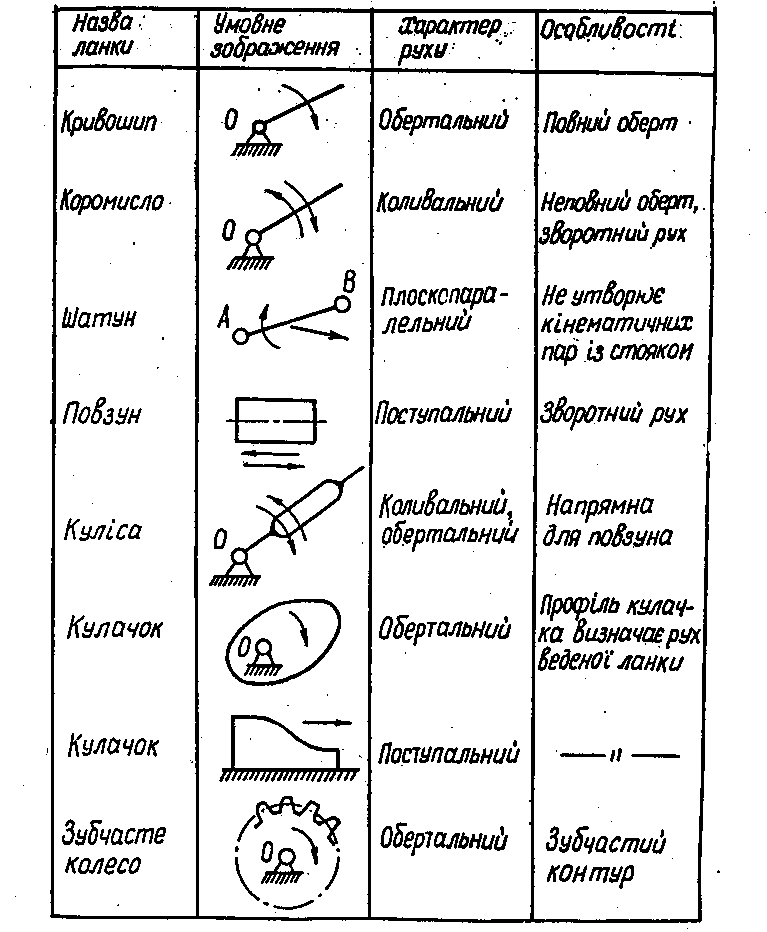
забезпечує за свій повний оберт безперервний рух парного зубчастого колеса.