

2.5. Побудова планів швидкостей і прискорень механізму
Розглянемо декілька прикладів побудови планів швидкостей і прискорень механізму.
Кривошипно
– повзунний механізм. Вважаємо заданими
розміри ланок і закон руху кривошипа
![]() .
Будуємо план механізму (рис.2.5., а) у
вибраному масштабі і заданому кутом φ
визначається за формулою (2.1):
.
Будуємо план механізму (рис.2.5., а) у
вибраному масштабі і заданому кутом φ
визначається за формулою (2.1):
![]() .
.
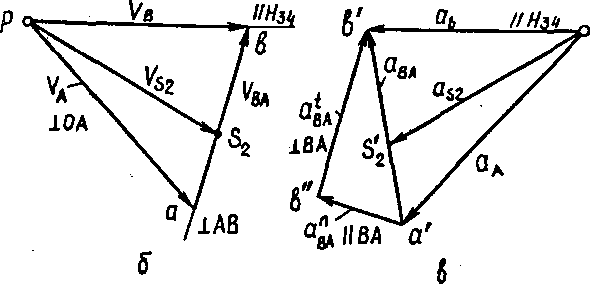
Рис.2.5. Побудова планів швидкостей і прискорень кривошипно – повзунного механізму: а – план механізму; б – план швидкостей; в – план прискорень
Знаючи
кутову швидкість кривошипа ω1
і його довжину
![]() ,
знаходимо швидкість точки А
за формулою
,
знаходимо швидкість точки А
за формулою
![]() .
Вектор
.
Вектор
![]() напрямлений перпендикулярно до кровишипа
ОА
в бік його руху. Вибираємо довжину
відрізка
напрямлений перпендикулярно до кровишипа
ОА
в бік його руху. Вибираємо довжину
відрізка
![]() ,
який зображає на плані (рис.2.5.,б) швидкість
точки А.
Визначамо масштабний коефіцієнт
швидкостей
,
який зображає на плані (рис.2.5.,б) швидкість
точки А.
Визначамо масштабний коефіцієнт
швидкостей
![]() .
.
Поршень (ланка 3), а, отже, і точка В, яка належить ланці 3 здійснює поступальний рух вздовж напрямної Н34. Одночасно точка В, як і точка А, належить ланці 2 (шатуну). Для визначення швидкості точки В напишемо векторне рівняння
![]() ,
,
де
![]() ,
,
![]() .
.
Тут і в подальшому вектор, відомий за значенням і напрямком, будемо підкреслювати двома лініями, а вектор, відомий тільки за напрямком – однією лінією.
Векторне
рівняння має визначене рішення, якщо в
ньому лише два невідомі елемента. Такими
невідомими елементами в останньому
рівнянні є значення швидкостей VB
і VBA.
Для визначення цих невідомих елементів
у відповідності з векторним рівнянням
проводимо через точку а
(рис.2.5,б) лінію, яка показує напрямок
відносної швидкості
![]() ,
а з полюса р
– лінію, яка паралельна напрямку руху
повзуна (ǁН34).
Точка перетину цих ліній визначає точку
b
– кінець векторів
,
а з полюса р
– лінію, яка паралельна напрямку руху
повзуна (ǁН34).
Точка перетину цих ліній визначає точку
b
– кінець векторів
![]() і
і
![]() .
Відрізок
.
Відрізок
![]() визначає швидкість VB,
а відрізок
визначає швидкість VB,
а відрізок
![]() - швидкість VBA.
Знаходимо величини цих швидкостей з
формул
- швидкість VBA.
Знаходимо величини цих швидкостей з
формул
![]() та
та
![]() .
.
Відрізок є планом швидкостей шатуна АВ. А тому точка S2 яка лежить на ньому, на плані швидкостей, згідно з теоремою подібності, буде лежати на відрізку . Склавши пропорцію
![]() ,
,
Знаходимо довжину відрізка
![]() .
.