

УДК 531.8 042.4
БЕК К 412 Я 73-2
В 753
Рецензенти: завідуючий кафедрою Національного аграрного університету, канд.техн.наук, доцент В.Ф.Ярошенко; ст.науковий співробітник Інституту механіки НАН України, канд.техн.наук С.Я.Антонюк
Затверджено на засіданні секції механічного факультету редради КМУЦА 12 грудая 1996 року.
Воронкін М.4., Цимбалюк А. А.
В 753 Основи теорії механізмів і машин: Конспект лекцій,- К.; КМУДА, 2000. - 208 с.
Розглянуті питання структури, кінематики та динаміки механізмів і машин, викладені принципи структурного аналізу та синтезу механізмів, методи кінематичного дослідження важільних, зубчастих та кулачкових механізмів, розглянуті питання силового розрахунку та методи зрівноваження механізмів і машин. Використані як графічні, так і аналітичні методи аналізу і синтезу.
Призначений для студентів технічних спеціальностей Київського міжнародного університету цивільної авіації очної та заочної форм навчання.
ББК К 412 Я 73-2
М.Ф.Воронкін, А.А.Цимбалюк, 2000
ВСТУП
Механіка - це наука, яка вивчає рух та напружений стан різних фізичних об’єктів. Вона ділиться на теоретичну та прикладну, які діалектично зв’язані між собою. В теоретичній механіці встановлюються загальні закономірності механіки без зв’язку їх з конкретним застосуванням.
В прикладній механіці вивчається рух та напружений стан реальних технічних об'єктів - машин, конструкцій, приладів.
Складовою частиною прикладної механіки є теорія механізмів та машин (ТММ) - наука про загальні методи дослідження властивостей механізмів та машин і проектування їхніх схем.
В теорії механізмів та машин вказані дослідження проводяться незалежно від конкретного призначення механізму: буде це механізм літального аппарату, автомобіля чи іншої машини. При цьому розглядаються найбільш загальні та суттєві признаки механізму.
Однією з найбільш важливих наукових абстракцій в ТТМ є розрахункова схема механізму, яка, якщо вона складена вірно, відображає загальні властивості механізму ліпше, вірніше та повніше ніж креслення конкретного механізму.
В процесі розвитку техніки зміст понять машини та механізму змінювались. Сучасне їхне визначення таке.
Машина - це технічний пристрій, в якому виконується механічні рухи для перетворення енергії, матеріалів та інформації з метою заміни, чи облегшення фізичної та розумової праці людей.
Машини бувають енергетичні, технологічні, транспортні та інформаційні.
В енергетичних машинах має місце перетворення енергії з одного виду в другий (двигун, генератори тощо).
В технологічних машинах змінюється форма, розміри, властивості початкових матеріалів (металообробні станки, прокатний стан тощо).
За допомогою транспортних машин здійснюється переміщання вантажів, людей та інших об'єктів у просторі з потрібнеє швидкістю (літаки, електровози, ліфти).
Перетворення вхідної інформації для контролю, регулювання та управління рухом здійснюється в інформаційних машинах.
Виконання робочого процесу в машинах зв’язане з виконанням механічних рухів. Носіями механічних рухів, як правило, в різні механізми. Ще зовсім недавно вважали, що механізм може складатися тільки із твердих тіл. Сучасне визначення цього поняття передбачає, що в механізм можуть входити також рідини та гази.
Механізм - це є система зв’язаних тіл, яка служить для перетворення рухів одного чи декількох твердих тіл в необхідні рухи інших твердих тіл. Якщо у склад механізму крім твердих тіл входять рідини чи газ, то такі механізми називаються відповідно гідравлічними чи пневматичними. Отже, неможливо вважати механізмом технічні пристрої, в яких немає перетворення рухів. Наприклад, ротор електродвигуна, що обертається в підшипниках. Механізми складають важливішу, хоча і не єдину частину більшості машик. Існує ряд машин, в які не входять механізми. Наприклад, турбіни реактивних двигунів, або технологічні машини, в яких виконуючий орган приводиться в рух від індивідуального електродвигуна чи гідродвигуна без перетворення рухів. Ототожнювати поняття "машина” та "механізм" неможливо ще й тому, що до складу машини завжди входять допоміжні технічні пристрої, які зв'язані з керуванням механізмів (пуск, зупинка тощо).
Задачі теорії механізмів та машин дуже різноманітні. Найбільш важливими з них є аналіз механізмів та синтез механізмів.
Аналіз механізмів заключається в дослідженні властивостей механізму (кінематичних, дінамічних, структурних) за заданою його схемою.
Синтез механізмів - це проектування схеми механізму і визначення його параметрів за заданими властивостями.
У курсі ТММ виділяють такі основні розділи: структура, кінематика та динаміка механізмів, причому в кожному з наведених розділів вирішуються як задачі аналізу, так і синтезу.
Значення курсу ТММ для підготовки інженерів, які проектують нові машини і механізми, очевидне, оскільки загальні методи дослідження властивостей механізмів, що розглядаяться в цьому курсі, дають можливість конструкторам визначити параметри будь-яких проектувальних машин з необхідними властивостями. Трохи інше значення має цей курс дяя технологічних і експлуатаційних спеціальностей у тому числі і спеціальностей, пов’язаних з експлуатацією та ремонтом аьіаційної техніки. Інженери цього профілю також повинні знати основні види механізмів, які використовуються в машинобудуванні, та їх властивості.
Ці знання необхідні для ясного розуміння принципів роботи окремих механізмів і їх взаємодії в машинах. У'процесі експлуатації будь-якої машини завади можливе виникнення неполадок та відказів у роботі. Ліквідувати ці несправності, дати завдання на модернізацію механізму чи проектуванню: нового може тільки інженер, який добре знає властивості різних механізмів.
1. Структурний аналіз механізмів
1.1. Основні поняття та визначення
Будь-який механізм або машина складається з твердих тіл, рухомо з’єднаних між собою.
Тверде тіло, що входить до складу механізму і рухомо з’єднане з іншими тілами, називається ланкою. Так, механізм двигуна внутрішнього сгорання (рис.1.1) складається з таких ланок, як колінчастий вал 1, шатун 2, поршень 3, циліндр 4. У цьому механізмі обернено-постулальний рух ланки 3 (поршня) перетворюється в обертальний рух ланки 1 (колінчастого вала).З таких же ланок складається і механізм авіаційного повітряного компресора, призначеного для стискання повітря та подачі його в повітряну систему літака. Але в компресорові обертальний рух колінчастого вала перетворюється у обернено-постулальний рух поршня.
Ланка може складатись з однієї або кількох деталей. Деталлю називається тверде тіло, що входить до складу ланки. Деталь виготовляють без скадальних операцій. Наприклад, ланка 2 (шатун двигуна) складається із тіла шатуна, запресованої в нього втулки, кришки шатуна, болтів із шайбами та шплінтами. Але всі ці деталі жорстко з’єднані між собою І рухаються ж одне тверде тіло. Точно так циліндр І, картер і інші деталі, що жорстко з’єднані з циліндром або картером, утворюють одну ланку (ланку І).
Ланки бувають рухомі та нерухомі. У стаціонарних машинах корпус двигуна разом а циліндром і і поний деталями є дійсно нерухомою ланкою. У рухомих машинах, наприклад, у двигуна автомобіля або літака, нерухомою ланкою вважається картер І Інші деталі, що постійно зв'язані з корпусом автомобіля або літака. Нерухома ланка механізму називається стояком. Огже, корпус двигуна та інші деталі, що жорстко зв’язані з ним, утворюють одну нерухому ланку, або стояк. Всі ншіі ланки, по рухаються відносні стояк*, або одна відносно іншої, називаються рухомими. У двигуна внутрішнього згоряння рухомими ланками е колінчастий вал І, шатун 2, поршень 3; нерухома ланка - корпус двигуна (ланка 4).
Таким чином у будь-якому механізмі або машині завжди маємо одну нерухому ланку та сущу або кілька рухомих ланок.
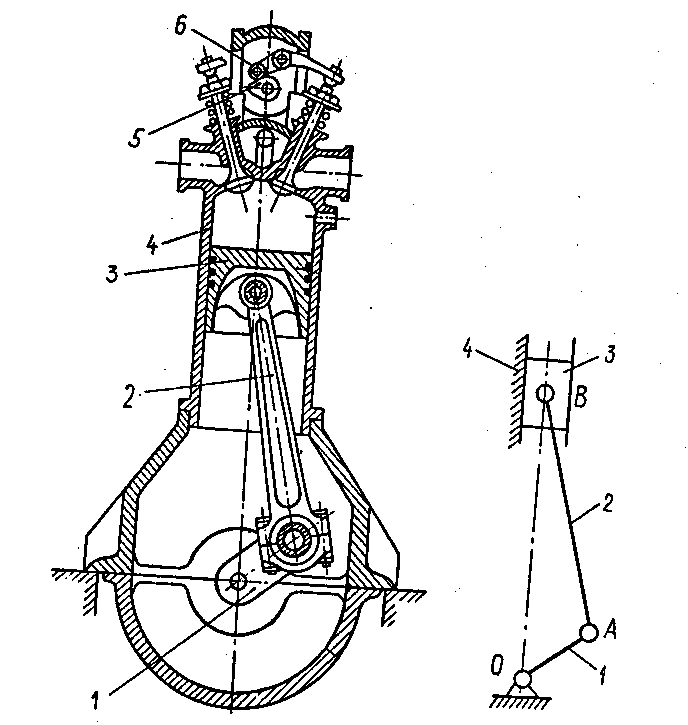
а б
Рис. 1.1. Механізм двигуна внутрішнього згорання (а) та його схема (б)
1 – колінчастий вал; 2 – шатун; 3 – поршень; 4 – циліндр; 5 – кулачок;
6 - клапан
Із рухомих ланок виділяють вхідні та вихідні ланки.
Вхідною (входом) називають ланку, якій надається рух, що перетворюється механізмом у потрібний рух інших ланок.
Вихідною (виходом) називають ланку, яка здійснює рух, для виконання якого призначений механізм Решту рухомих ланок механізму називають з’єднуючими, або проміжними.
Як правило, у механізмі є один вхід та один вихід. Вхідна ланка отримує рух від двигуна, а вихідна ланка зв’язана з робочим виконавчим органом машини. Але є механізми, в яких с декілька вхідних і вихідних ланок. Наприклад, в автомобільному диференціалі один вхід, який отримує рух від двигуна, та два виходи, які з’єднані із задніми колесами.
У динаміці механізмів і машин рухомі ланки ще ділять на ведучі та ведені.
Ведучою називають таку ланку, для якої елементарна робота зовнішніх сил, що прикладаються до неї, додатна.
Веденою називають ланку, для якої елементарна робота зовнішніх сил, що прикладені до неї, від'ємна.
У деяких механізмів вхідна ланка на окремих ділянках руху може бути то ведучою, то веденою. Так само і вихідна ланка на окремих ділянках руху в залежності від співвідношення сил, що діють на ланку механізму, може бути то веденою, то ведучою.
У механізмах і машинах ланки з’єднуються одна з одною так, що завади забезпечується можливість їхнього відносного руху. Рухоме з’єднання двох ланок, які стикаються, називаються кінематичною парою.
У механізмі двигуна внутрішнього згорання (рис.1.1) колінчастий вал 1 і стояк 4 утворюють кінематичну пару. Ця пара допускає лише один обертальний рух ланки 1 відносно ланки 4. Така кінематична пара називається обертальною. Колінчастий вал І і шатун 2 також утворюють обертальну кінематичну пару, бо вона допускає лише один обертальний рух однієї ланки (наприклад, шатуна) відносно іншої ланки (колінчастого вала). Так само шатун 2 та поршень 3 утворюють обертальну кінематичну пару, бо вона допускає лише один обертальний рух, наприклад, шатуна відносно поршня. Але поршень 3 та циліндр 4. утворюють поступальну кінематиичну пару, бо вона допускає лише один поступальний рух поршня відносно стояка.
Характер відносного руху ланок визначається формою елементів ланок, якими вони стикаються. Сукупність поверхонь, ліній або точок, які належать ланкам і які стикаються при відносному русі ланок, називають елементами кінематичних пар.