

Приклади побудови нейромережевих систем керування динамічними об'єктами
Нейромережева модель системи керування ГТД
Будемо думати, що за результатами спостереження в реальних умовах польоту за функціонуванням авіаційного двувального газотурбінного двигуна (ГТД) потрібно побудувати нелінійну динамічну модель САК ГТД на основі рекурентної НМ. У якості вихідних даних використовуються оцифровані показання бортового самописа (пристрою реєстрації даних), що відповідають деякій ділянці польоту (рис. 5.4.21) тривалістю T = 5 хв 20 с.
При періоді дискретизації, рівному T0 = 1 c, це означає, що навчальна вибірка містить 320 крапок (часових відліків). Необхідна точність побудови моделі – не гірше (3...4) % в усьому діапазоні часу спостереження. Помітимо, що всі наведені на рис. 5.4.21 змінні є відносними (безрозмірними) і отримані шляхом розподілу вихідних фізичних параметрів ГТД на їх максимальні (гранично можливі) значення. т.т. належать інтервалу [0, 1].
Для рішення завдання ідентифікації за допомогою НМ (див. рис. 5.4.15, а) скористаємося розглянутим у розд. 5.4.6 методом «часового вікна». Відповідно до цього методу, на вхід НМ послідовно подаються L дискретних відліків сигналу u(k -L),u( k - L+1),..., u(k -1), що перебувають у межах часового вікна. У нашім випадку, під входом u(k) розуміється значення сигналу αВУД(k), тобто задавального впливу на вході САК в k-й, момент часу (t = kT0). У якості бажані значень виходів НМ розглядаються значення виходів об'єкта yі, (і = 1,2,..., m) у моменти часу k - L+1, k - L+2, ..., k. У розглянутому прикладі – це значення вихідних параметрів двигуна TT*, n1 і n2. Таким чином, таблиця, у якій зберігається L «четвірок» – дані навчальної вибірки НМ у межах зазначеного часового вікна, приймає наступний вид (табл. 5.4.1).
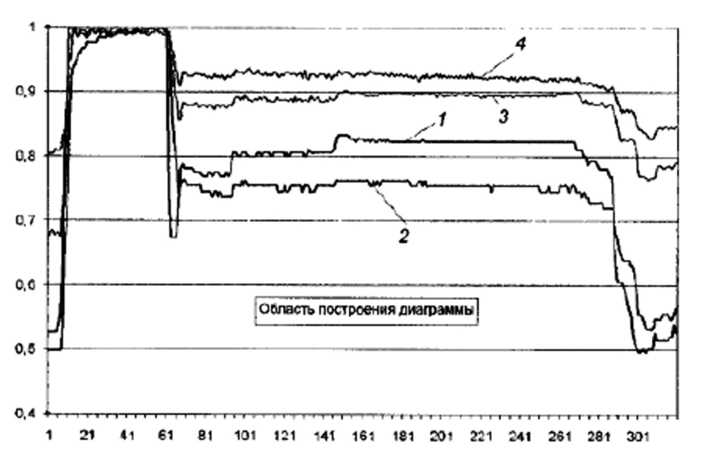
Рис. 5.4.21. Графіки зміни контрольованих параметрів ГТД:
1 – положення важеля управління двигуном ВУД (αВУД); 2 – температура загальмованого потоку газів за турбіною TT*; 3 – частота обертання ротора компресора низького тиску п1; 4 – частота обертання ротора компресора високого тиску п2
Таблиця 5.4.1.
Навчальна вибірка |
||||
Час |
αВУД |
TT* |
п1 |
п2 |
k - L |
………... |
|
|
|
k - L + 1 |
|
…………. |
………….. |
………….. |
… |
… |
… |
|
|
к |
|
|
|
|
![]()
Вхід НМ Виходи НМ
Базова структура нейромережевої моделі системи, побудованої на основі рекурентної мережі Елмана, представлена на рис. 5.4.22. Тут вхідний шар НМ складається з (σ + 1) нейронів, на входи яких подаються значення сигналів αВУД (k) і із затриманих (на один такт) виходів нейронів схованого шару хi(k + 1),..., хσ(k + 1); виходами НМ є значення спостережуваних параметрів двигуна TT*, п1, п2 в (k + 1) -й момент часу.
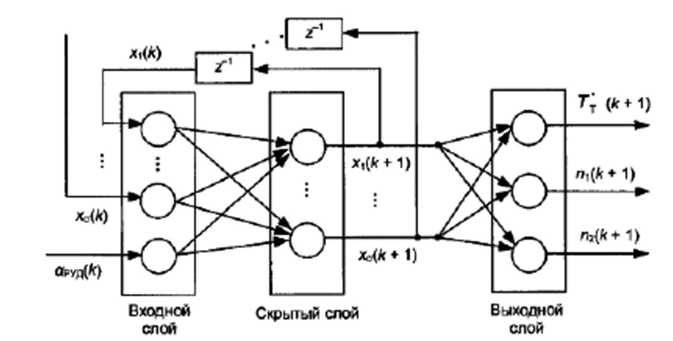
Рис. 5.4.22. Структура нейромережевої моделі