

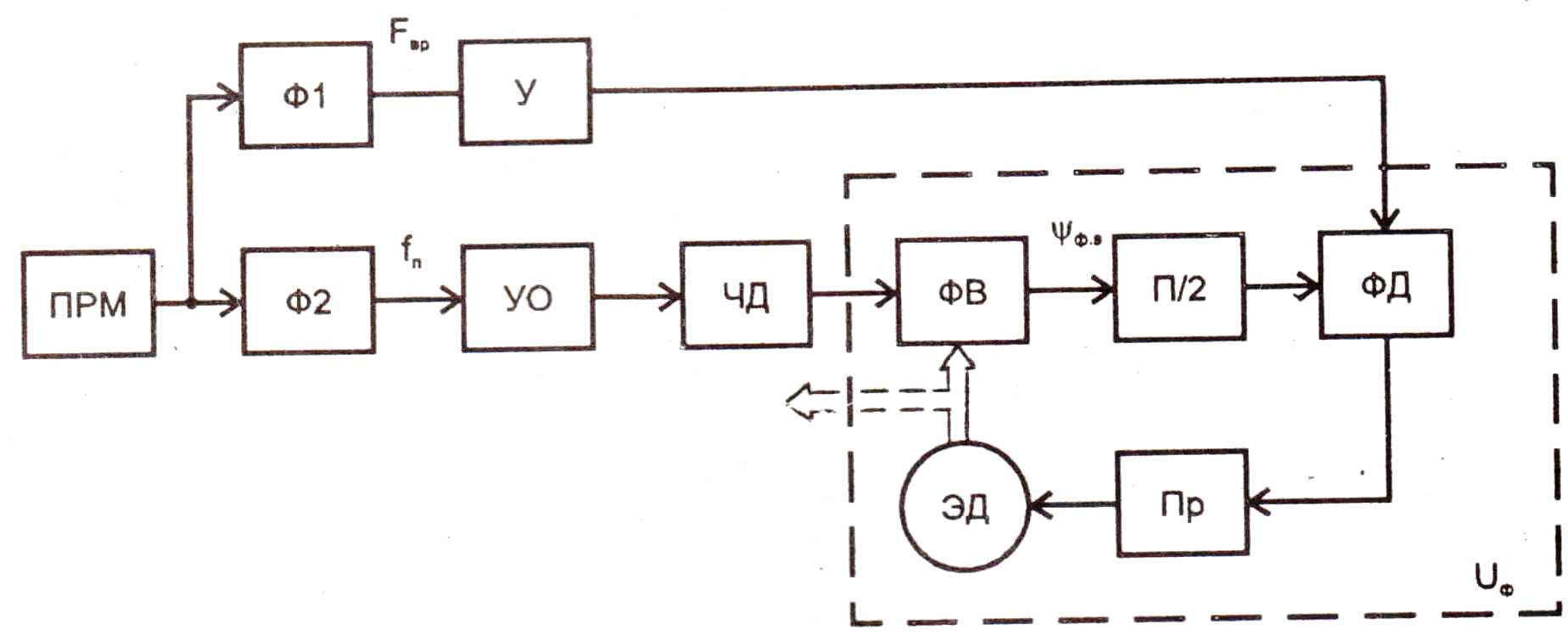
Структурная схема канала азимута
Структурная
схема бортового оборудования содержит
два фильтра включенных после приемника
ПРМ. Фильтр Ф1 выделяет сигнал переменной
фазы с
Гц, который затем после усилителя У
подается на фазовый детектор ФД. ФД
является чувствительным элементом
следящего измерителя фазы ИФ. Фильтр
Ф2 выделяет опорный сигнал ЧМ поднесущей
9960 Гц. Выделенный сигнал через
усилитель-ограничитель УО, срезающий
паразитную AM подается на частотный
детектор ЧД, где выделяется сигнал
опорной фазы. В фазовращателе ФВ фаза
сигнала изменяется на
 ,
а затем сдвигается на 90°. Если
,
а затем сдвигается на 90°. Если
 ,
то под действием сигнала электродвигатель
ЭД поворачивает ротор ФВ до тех пор,
пока
,
то под действием сигнала электродвигатель
ЭД поворачивает ротор ФВ до тех пор,
пока
 По углу поворота ротора ФВ можно
определить фазу
По углу поворота ротора ФВ можно
определить фазу .
.
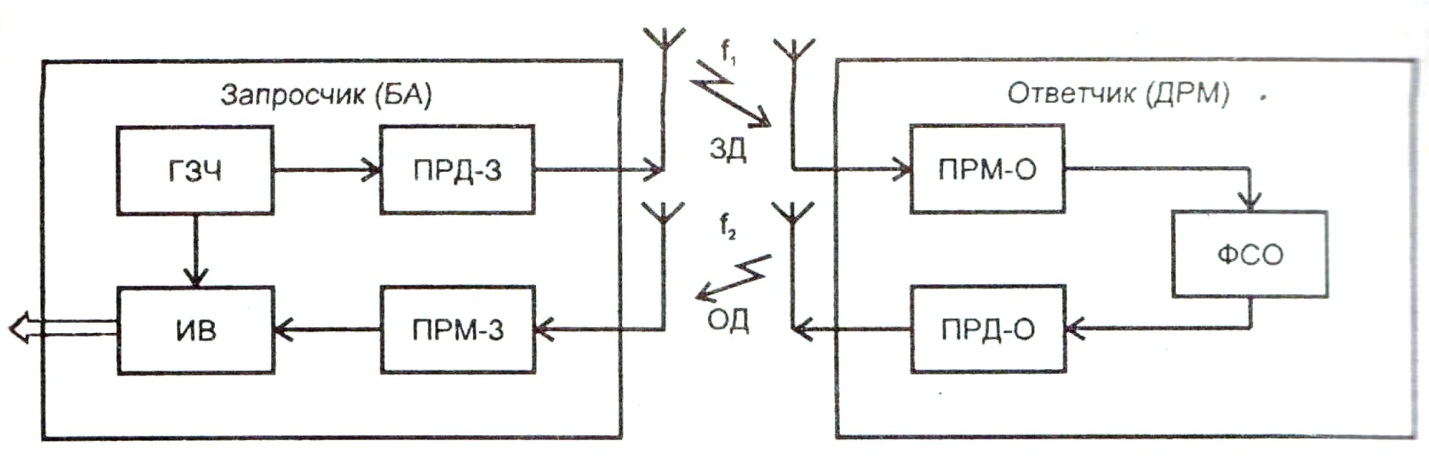
Канал дальности основан на временном методе. Информация о дальности заключена в интервале времени между моментом излучения с ВС сигнала запроса дальности (ЗД) и моментом приема сигнала ответа дальности (ОД) с наземного ДРМ.
Состав
канала дальности определяется принятым
в СБН принципом «запрос – ответ».
Генератор запросных импульсов ГЗИ
запросчика формирует кодированные
сигналы ЗД. Импульсы ЗД модулируют ПРД-3
и излучаются на несущей частоте
 .
В ПРМ-О ответчика эти сигналы усиливаются,
детектируются и декодируются. Формирователь
сигнала ответа ФСО задерживает полученный
с ПРМ-0 импульс на определенное время и
вырабатывает кол ответа дальности (ОД).
Сформированный сигнал ОД поступает на
ПРД-0 и излучается ненаправленной
антенной на несущей частоте
.
В ПРМ-О ответчика эти сигналы усиливаются,
детектируются и декодируются. Формирователь
сигнала ответа ФСО задерживает полученный
с ПРМ-0 импульс на определенное время и
вырабатывает кол ответа дальности (ОД).
Сформированный сигнал ОД поступает на
ПРД-0 и излучается ненаправленной
антенной на несущей частоте
 .
Сигнал ОД усиливается, детектируется
и декодируется в ПРМ-3. Измеритель времени
ИВ измеряет интервал между моментом
начала формирования ЗД и моментом приема
ОД.
.
Сигнал ОД усиливается, детектируется
и декодируется в ПРМ-3. Измеритель времени
ИВ измеряет интервал между моментом
начала формирования ЗД и моментом приема
ОД.
Измеритель дальности основан на цифровом методе и определяет число счетных импульсов за интервал времени между импульсом ЗД и импульсом ОД.
Структурная схема канала дальности
Автоматический радиопеленгатор арп-75
Назначение
Аэродромный многоканальный автоматический УКВ радиопеленгатор повышенной точности АРП-75 предназначен для определения пеленгов воздушных судов, оборудованных УКВ радиостанциями и находящихся на связи у диспетчера управления воздушным движением.
АРП-75 включается в состав оборудования аэропортов большой и средней интенсивности воздушного движения и работает одновременно частотнонезависимо на четырех (восьми) пеленгаторных каналах с отображением информации на стрелочных индикаторах.
Предусмотрена возможность сопряжения АРП-75 с ВИКО РЛС и с индикаторами аппаратуры, предназначенной для опознавания воздушных судов.
Эксплуатационные характеристики
АРП-75 обеспечивает пеленгование воздушных судов с точностью, характеризуемой следующими ошибками:
максимальной инструментальной ошибкой, град не более ±1
вероятной ошибкой, град не более 1
Зона пеленгования по азимуту, град 360
Зона пеленгования по углу места, град 38
Дальность пеленгования при мощности бортовой УКВ радиостанции 5 Вт и высоте полета, км
1000 м не менее 100
3000 м не менее 180
10000 м не менее 300
Диапазон рабочих частот 118... 135,975 МГц с сеткой через 25 кГц.
Число одновременно пеленгуемых воздушных судов, работающих
на разных частотных каналах связи от 1 до 4(8)
Время излучения бортового передатчика для получения
пеленга с заданной точностью, с не менее 1
Технический ресурс составляет 50 000 часов (временной параметр в течение 10 лет. В это время допускаются ремонты с заменой отработавших свой срок деталей.
Время непрерывной работы, ч ....; 24
Условия эксплуатации:
температура окружающего воздуха от -50 до +50°С (для аппаратуры)
КДП - от 5 до +40°С;
относительная влажность окружающего воздуха до 98% при температуре 35°С (для антенно-мачтового устройства).
В аппаратной имеются автоматические системы обогрева и вентиляции, но нормальная работа АРП сохраняется при отключении или выходе из строя этих систем.
АРП обеспечивается местным и дистанционным включением каналов. При этом групповая аппаратура включается при включении одного канала, а отключается при отключении всех каналов. Дистанционное управление аппаратурой, установленной в аппаратной, дистанционный контроль, дистанционный выбор частоты резервных каналов, трансляция пеленгов всех каналов осуществляется по линии связи длиной до 10 км.
АРП может сопрягаться с ВИКО РЛС "Скала", ОПРЛ-4, "Экран-М2", "Экран-Д" и индикаторами аппаратуры "Знак", "Строка-Б".
Потребляемая мощность АРП, Вт:
от сети 380 В 50 Гц не более 2000
с обогревом ....не более 8000
от сети 220 В 50 Гц не более 700
Месторасположение АРП
Выбор места установки АРП производится с целью обеспечения требуемой точности пеленгования (вероятной ошибки) 1°.
Наличие местных предметов приводится к тому, что отраженные от них (с направлений, отличающихся от истинного) изменяют амплитудуифазу полезного сигнала, что приводит к ошибкам в измерении пеленга на источник излучения.
При выборе места установки АРП необходимо учитывать требования по обеспечению электромагнитной современности при одновременной работе АРП с другими радиотехническими средствами: УКВ радиостанциями, курсовыми радиомаяками и бортовыми УКВ передатчиками при посадке воздушных судов.
Задачи по обеспечению электромагнитной совместимости на местах эксплуатации АРП решаются путем маневрирования в определенных пределах частотными и пространственными ресурсами.
В аэропортах гражданской авиации принимается следующее расположение АРП:
в районе OPJI-Aрасстояние до OPJ1-Aпри высоте объекта 6...20 м должно быть 60 м, до ПРЛ при высоте объекта 5 м 60 м, до каменных и деревянных строений при высоте 3...5 м - 60 м;
в районе OPJ1-Tрасстояние до OPJ1-Tпри высоте объекта 13...15 м - 30...40 м: до УКВ радиостанций при высоте объекта 20...30 м должно быть 100 м;
допустимые расстояния от АРП до курсового радиомаяка для КРМ 1-й категории - 500 м, для КРМ 2-й категории - 300 м.
Допустимое расстояние от АРП до УКВ радиостанций различной мощности:
Мощность, Вт 6 6 6 6 10 12 12 87 250 250
Высота пе-
редающей ан- 6 7 8 15 8 15 32 8 8
тенны, м
Допустимое
расстояние, м 950 1000 1100 1400 1300 1700 2100 2100 3000 5000
Площадка для установки АРП должна быть ровной в радиусе 100 м (уклон не более 0,02).
Лес высотой 10 м и выше должен быть на расстоянии не менее 300 м.
Антенно-мачтовое устройство должно быть установлено от кузова ПАУ-1 на расстоянии не менее 10 м.
Принцип работы
Принцип работы радиопеленгатора заключается в приеме сигнала пеленгуемого передатчика на вращающуюся (коммутирующую) по окружности в горизонтальной плоскости антенну (симметричный полуволновой вибратор). Схематично антенна показана на рис, где R - радиус окружности, D - частота вращения.
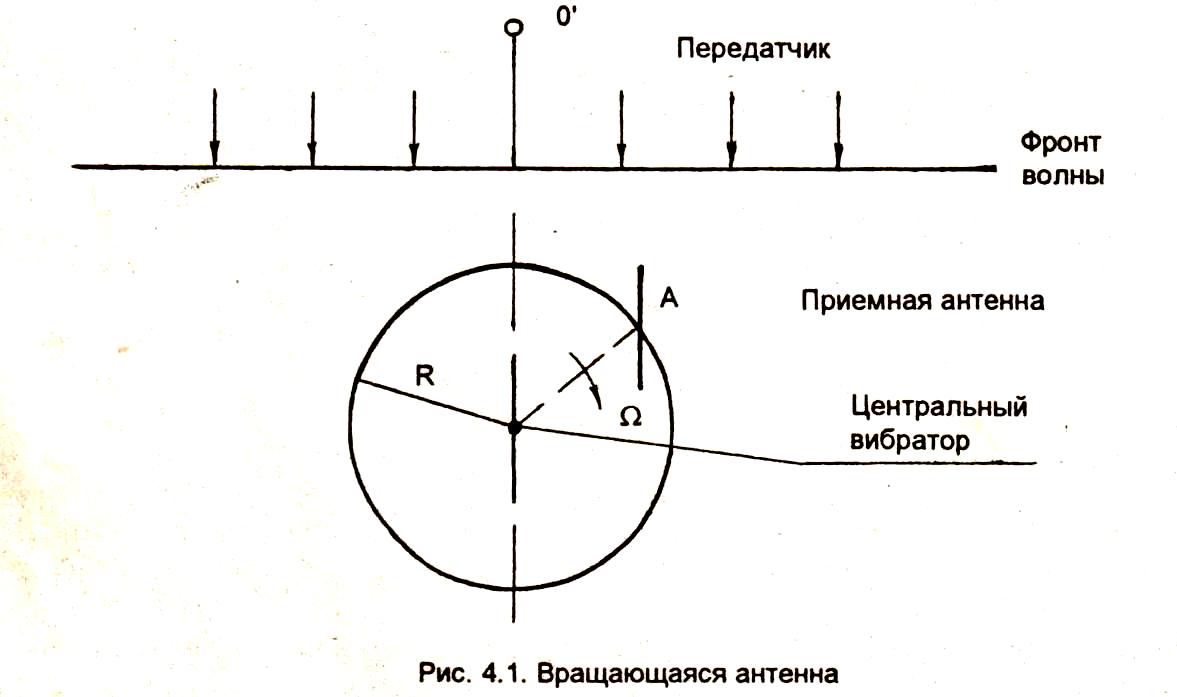
В результате вращения антенны возникает эффект Доплера и на принимаемый сигнал налагается фазовая (частотная) модуляция. Эффект Доплера состоит в том, что относительное перемещение приемника и передатчика приводит к изменению частоты (а следовательно, и фазы) принимаемого сигнала. В устройстве преобразования информации АРП происходит последовательное выделение налагаемого вращающейся антенной закона фазовой модуляции и определение начальной фазы первой гармоники этого закона, так как начальная фаза соответствует пеленгу на радиопередатчик.
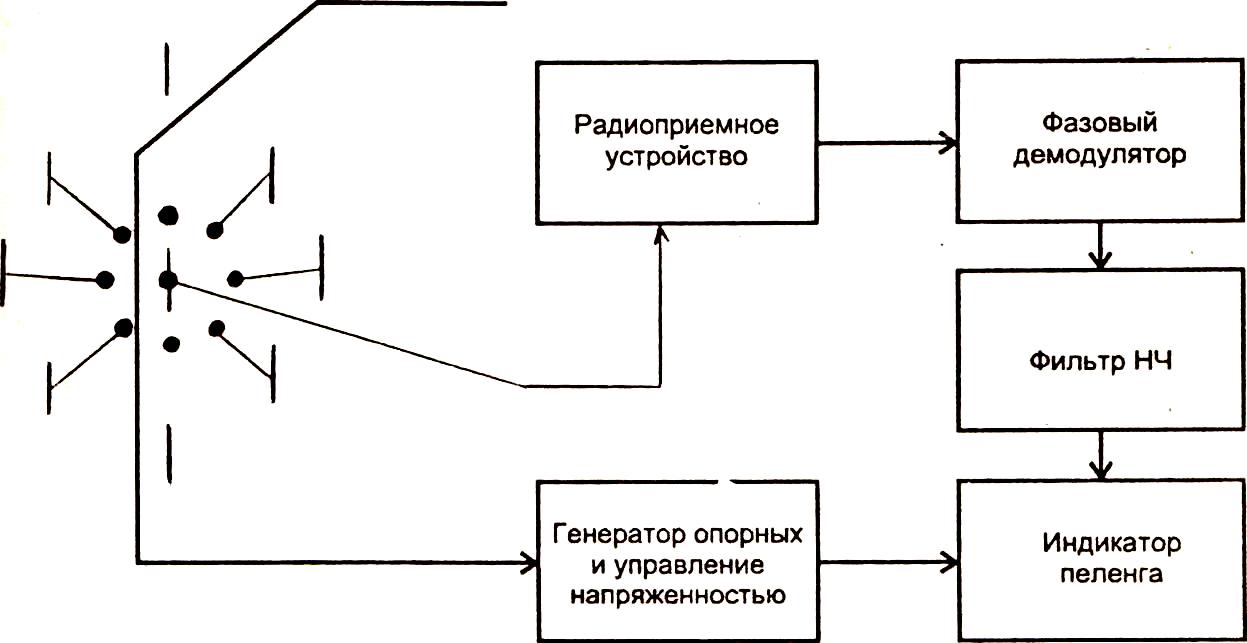
На практике вместо вращающейся антенны применяются системы расположенных по окружности неподвижных вибраторов, которые с помощью коммутатора последовательно подключаются ко входу приемника. Такой радиопеленгатор называют квазидоплеровским. Упрощенная структурная схема представлена на рис. 4.2.
Сигнал, принимаемый антенной системой, модулируется в кольцевой антенной решетке, представляющей собой 16 вертикальных симметричных вибраторов.
Вращение одного вибратора по окружности имитируется последовательным переключением 16 вибраторов с частотой переключения F = 525 Гц.
При этом частота "вращения" антенны равна Ω =F/16=32,8 Гц.
Переключение вибраторов осуществляется с помощью электронного коммутатора и выключателей, управляемых прямоугольными импульсами, которые формируются в аппаратуре управления и контроля, фазомодулированный сигнал подается на модулятор, где смешивается с опорным гармоническим колебанием стабильной частоты fоп = 4200 Гц и гармоническим сигналом, принятым центральным вибратором.
Коммутатор
Структурная схема АРП-75
Описание функциональной схемы:
Опорное напряжение формируется в аппаратуре управления и контроля. На выходе модулятора присутствуют два сигнала: сигнал с центрального вибратора частоты fи фазомодулированный сигнал с кольцевой антенной решетки частоты f + fоп . С выхода модулятора суммарный сигнал подается на усилитель-распределитель с помощью которого осуществляется подключение входного сигнала одновременно к радиоприемным устройствам всех каналов.
Каналы работают идентично. В радиоприемном устройстве происходит усиление и переключение сигналов, слагаемых на амплитудном детекторе. При этом выделяется фазомодулированный сигнал частоты 4200 Гц.
Дальнейшая обработка сигнала происходит в аппаратуре преобразования информации, на выходе которой формируются постоянные напряжения, пропорциональные синусу и косинусу пеленга передатчика. При появлении на входе индикатора этих напряжений его стрелка поворачивается на угол, соответствующий пеленгу.
Сигнал, принимаемый антенной системой, модулируется в кольцевой антенной решетке, представляющей собой 16 вертикальных симметричных вибраторов.
Вращение одного вибратора по окружности имитируется последовательным переключением 16 вибраторов с частотой переключения F = 525 Гц.
При этом частота "вращения" антенны равна Ω =F/16=32,8 Гц.
Переключение вибраторов осуществляется с помощью электронного коммутатора и выключателей, управляемых прямоугольными импульсами, которые формируются в аппаратуре управления и контроля, фазомодулированный сигнал подается на модулятор, где смешивается с опорным гармоническим колебанием стабильной частоты fоп = 4200 Гц и гармоническим сигналом, принятым центральным вибратором.
Опорное напряжение формируется в аппаратуре управления и контроля. На выходе модулятора присутствуют два сигнала: сигнал с центрального вибратора частоты fи фазомодулированный сигнал с кольцевой антенной решетки частоты f + fоп . С выхода модулятора суммарный сигнал подается на усилитель-распределитель с помощью которого осуществляется подключение входного сигнала одновременно к радиоприемным устройствам всех каналов.
Каналы работают идентично. В радиоприемном устройстве происходит усиление и переключение сигналов, слагаемых на амплитудном детекторе. При этом выделяется фазомодулированный сигнал частоты 4200 Гц.
Дальнейшая обработка сигнала происходит в аппаратуре преобразования информации, на выходе которой формируются постоянные напряжения, пропорциональные синусу и косинусу пеленга передатчика. При появлении на входе индикатора этих напряжений его стрелка поворачивается на угол, соответствующий пеленгу.
АРП может работать в местном и дистанционном режиме. При работе в дистанционном режиме пеленгованные сигналы и сигналы управления и контроля, вырабатываемые системой управления и контроля, по линии связи длиной до 10 км передаются, на КДП. Через аппаратуру дистанционного управления и контроля шкафа КДП пеленгационные сигналы подаются на индикаторы пеленга, установленные на рабочих местах операторов и на аппаратуру сопряжения с PJ1C.
Транслируемые сигналы управления и контроля индицируются на световом табло. Для работы по настройке и проверке аппаратуры аппаратной АРП предусмотрен местный режим работы. В этом случае управление АРП осуществляется только из аппаратной, а контроль ведется с помощью индикатора пеленга, который может подключаться к любому каналу. Для проверки работоспособности АРП при отсутствии основных пеленгуемых объектов служит антенна с контрольно-испытательныл генератором (КИГ).
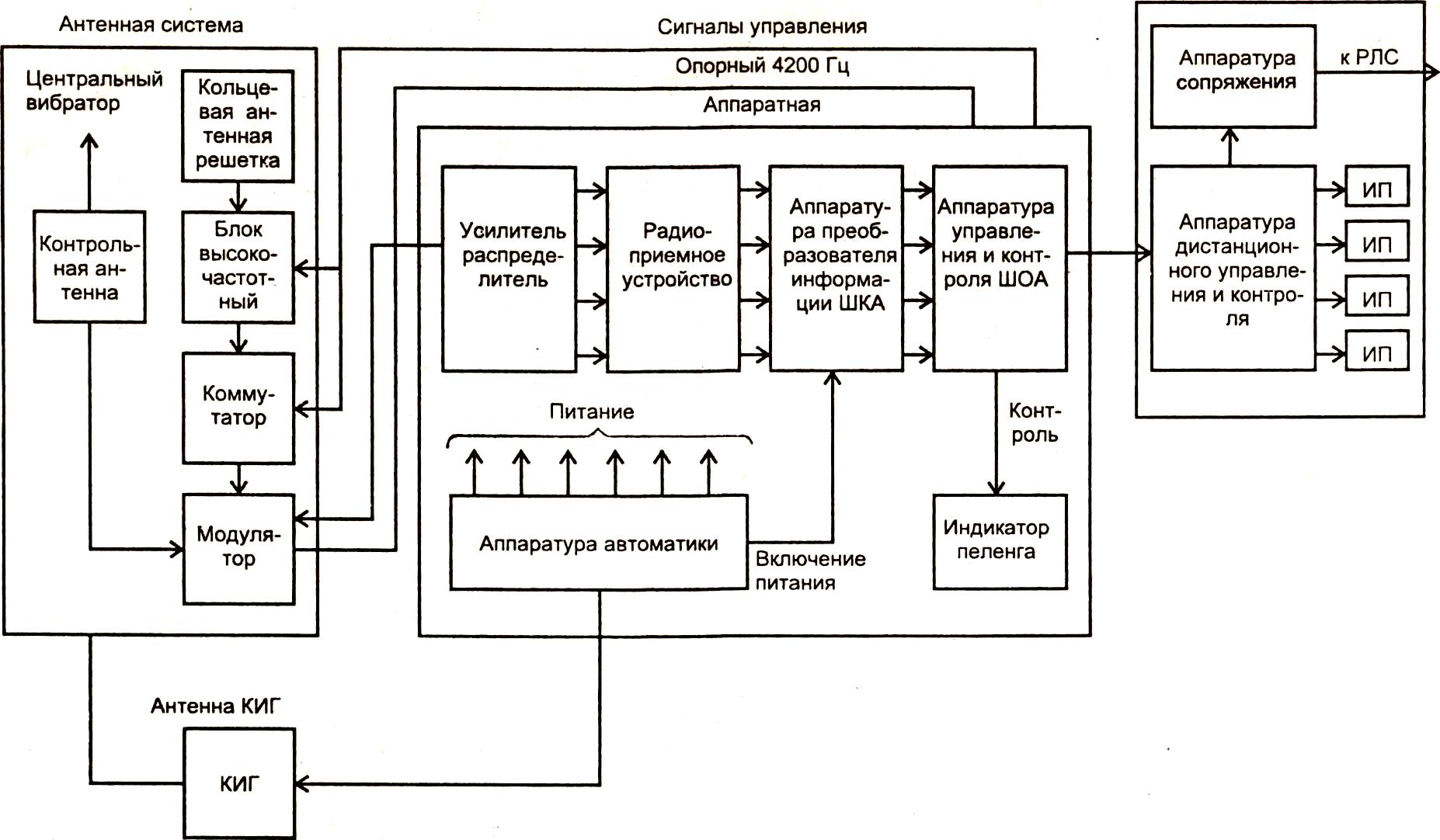
Функциональная схема