

14. Метод Рунге-Кутта решения дифференциальных уравнений
Ме́тоды Ру́нге — Ку́тты (распространено неправильное название Ме́тоды Ру́нге — Ку́тта или даже Ме́тоды Ру́нге — Кутта́) — важное семейство численных алгоритмов решения обыкновенных дифференциальных уравнений и их систем. Данные итеративные методы явного и неявного приближённого вычисления были разработаны около 1900 года немецкими математиками К. Рунге и М. В. Куттой.
Формально, методом Рунге — Кутты является модифицированный и исправленный метод Эйлера, они представляют собой схемы второго порядка точности. Существуют стандартные схемы третьего порядка, не получившие широкого распространения. Наиболее часто используется и реализована в различных математических пакетах (Maple, MathCAD, Maxima) стандартная схема четвёртого порядка. Иногда при выполнении расчётов с повышенной точностью применяются схемы пятого и шестого порядков. Построение схем более высокого порядка сопряжено с большими вычислительными трудностями. Методы седьмого порядка должны иметь по меньшей мере девять стадий, в схему восьмого порядка входит 11 стадий. Хотя схемы девятого порядка не имеют большой практической значимости, неизвестно, сколько стадий необходимо для достижения этого порядка точности. Аналогичная задача существует для схем десятого и более высоких порядков
Классический метод Рунге — Кутты четвёртого порядка
Метод Рунге — Кутты четвёртого порядка столь широко распространён, что его часто называют просто методом Рунге — Кутты.
Рассмотрим задачу Коши
![]()
Тогда приближенное значение в последующих точках вычисляется по итерационной формуле:
![]()
Вычисление нового значения проходит в четыре стадии:
![]()
![]()
где ![]() —
величина шага сетки по
—
величина шага сетки по ![]() .
.
Этот
метод имеет четвёртый порядок точности,
то есть суммарная ошибка на конечном
интервале интегрирования имеет
порядок ![]() (ошибка
на каждом шаге порядка
(ошибка
на каждом шаге порядка ![]() ).
).
Прямые методы Рунге — Кутты[править | править исходный текст]
Семейство прямых методов Рунге — Кутты является обобщением метода Рунге — Кутты четвёртого порядка. Оно задаётся формулами
![]()
где
—
величина шага сетки по
и
вычисление нового значения проходит
в ![]() этапов:
этапов:

Конкретный
метод определяется числом
и
коэффициентами ![]() и
и ![]() .
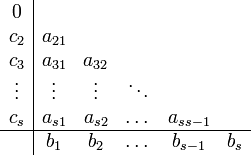
Эти коэффициенты часто упорядочивают
в таблицу (называемую таблицей Бутчера)
.
Эти коэффициенты часто упорядочивают
в таблицу (называемую таблицей Бутчера)
Для
коэффициентов метода Рунге — Кутты
должны быть выполнены условия  для
для ![]() .
Если требуется, чтобы метод имел
порядок
.
Если требуется, чтобы метод имел
порядок ![]() ,
то следует также обеспечить условие
,
то следует также обеспечить условие
![]()
где ![]() —
приближение, полученное по методу
Рунге — Кутты. После многократного
дифференцирования это условие
преобразуется в систему полиномиальных
уравнений относительно коэффициентов
метода.
—
приближение, полученное по методу
Рунге — Кутты. После многократного
дифференцирования это условие
преобразуется в систему полиномиальных
уравнений относительно коэффициентов
метода.
15. Движение тела, брошенного под углом к горизонту
Теория
Если
тело бросить под углом к горизонту, то
в полете на него действуют сила тяжести
и сила сопротивления воздуха. Если силой
сопротивления пренебречь, то остается
единственная сила – сила тяжести.
Поэтому вследствие 2-го закона Ньютона
тело движется с ускорением, равным
ускорению свободного падения ![]() ;
проекции ускорения на координатные оси
равны ах =
0, ау =
-g.
;
проекции ускорения на координатные оси
равны ах =
0, ау =
-g.
Л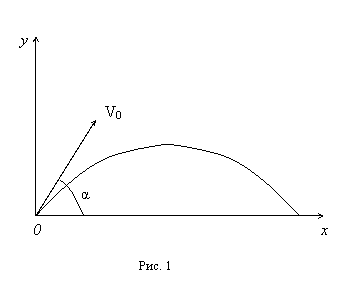 юбое
сложное движение материальной точки
можно представить как наложение
независимых движений вдоль координатных
осей, причем в направлении разных осей
вид движения может отличаться. В нашем
случае движение летящего тела можно
представить как наложение двух независимых
движений: равномерного движения вдоль
горизонтальной оси (оси Х) и равноускоренного
движения вдоль вертикальной оси (оси
Y) (рис. 1).
юбое
сложное движение материальной точки
можно представить как наложение
независимых движений вдоль координатных
осей, причем в направлении разных осей
вид движения может отличаться. В нашем
случае движение летящего тела можно
представить как наложение двух независимых
движений: равномерного движения вдоль
горизонтальной оси (оси Х) и равноускоренного
движения вдоль вертикальной оси (оси
Y) (рис. 1).
Проекции скорости тела, следовательно, изменяются со временем следующим образом:
![]() ,
,
где ![]() –
начальная скорость, α – угол бросания.
–
начальная скорость, α – угол бросания.
Координаты тела, следовательно, изменяются так:

При
нашем выборе начала координат начальные
координаты ![]() (рис.
1) Тогда
(рис.
1) Тогда
|
(1) |
Проанализируем формулы (1). Определим время движения брошенного тела. Для этого положим координату y равной нулю, т.к. в момент приземления высота тела равна нулю. Отсюда получаем для времени полета:
|
(2) |
Второе значение времени, при котором высота равна нулю, равно нулю, что соответствует моменту бросания, т.е. это значение также имеет физический смысл.
Дальность полета получим из первой формулы (1). Дальность полета – это значение координаты х в конце полета, т.е. в момент времени, равный t0. Подставляя значение (2) в первую формулу (1), получаем:
|
(3) |
Из этой формулы видно, что наибольшая дальность полета достигается при значении угла бросания, равном 45 градусов.
Наибольшую высоту подъема брошенного тела можно получить из второй формулы (1). Для этого нужно подставить в эту формулу значение времени, равное половине времени полета (2), т.к. именно в средней точке траектории высота полета максимальна. Проводя вычисления, получаем
|
(4) |
Из уравнений (1) можно получить уравнение траектории тела, т.е. уравнение, связывающее координаты х и у тела во время движения. Для этого нужно из первого уравнения (1) выразить время:
![]()
и подставить его во второе уравнение. Тогда получим:
![]() .
.
Это уравнение является уравнением траектории движения. Видно, что это уравнение параболы, расположенной ветвями вниз, о чем говорит знак «-» перед квадратичным слагаемым. Следует иметь в виду, что угол бросания α и его функции – здесь просто константы, т.е. постоянные числа.