

4.3 Эксперименты с локально однородными сценами
Для иллюстрации
рассмотренных методов поиска зон
интереса, воспользуемся фрагментом
локально однородной сцены. Ее проекцией
служит квадрат со стороной, равной 511
масштабным единицам (![]() )
или 512 пикселям. Фрагмент состоит из 20
объектов. Девятнадцать объектов имеют
прямоугольные проекции со сторонами
29 и 14 масштабных единиц, случайные
координаты и ориентацию. Каждый объект
является участком однородного случайного
поля, со средним значением
)
или 512 пикселям. Фрагмент состоит из 20
объектов. Девятнадцать объектов имеют
прямоугольные проекции со сторонами
29 и 14 масштабных единиц, случайные
координаты и ориентацию. Каждый объект
является участком однородного случайного
поля, со средним значением
![]() и корреляционной функцией
и корреляционной функцией
![]() ,
заданной таблицей 2.2. Остальные пиксели
фрагмента образуют двадцатый объект,
который будет называться фоном. Он также
является участком однородного случайного
поля со средним значением
,
заданной таблицей 2.2. Остальные пиксели
фрагмента образуют двадцатый объект,
который будет называться фоном. Он также
является участком однородного случайного
поля со средним значением
![]() и той же самой корреляционной функцией.
Однородные случайные поля для каждого
объекта и фона строятся по способу,
описанному в 2.3, то есть скользящим
суммированием по квадратной окрестности
с радиусом . При указанных средних
значениях и дисперсиях отношение
сигнал/шум в окрестности каждого из
девятнадцати объектов составляет
величину
и той же самой корреляционной функцией.
Однородные случайные поля для каждого
объекта и фона строятся по способу,
описанному в 2.3, то есть скользящим
суммированием по квадратной окрестности
с радиусом . При указанных средних
значениях и дисперсиях отношение
сигнал/шум в окрестности каждого из
девятнадцати объектов составляет
величину
![]() .
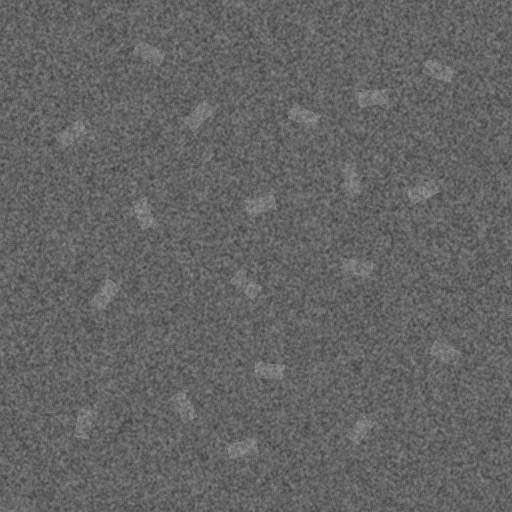
Одно из возможных изображений фрагмента
приведено на рисунке 4.1. По нему можно
достаточно уверено построить зону
интереса для каждого объекта визуальным
способом.
.
Одно из возможных изображений фрагмента
приведено на рисунке 4.1. По нему можно
достаточно уверено построить зону
интереса для каждого объекта визуальным
способом.
|
Рисунок 4.1 - Изображение локально однородной сцены (, )
|
Для
проведения компьютерных экспериментов
по поиску зон интереса требуется знать
диаметр
объектов, длину
стороны зоны интереса, количество
фрагментов границы, радиус сглаживания
и шаг
![]() .
Значение
,
вычисленное по прямоугольной проекции
с указанными выше размерами, равняется
.
Значение
,
вычисленное по прямоугольной проекции
с указанными выше размерами, равняется
![]() единицам. Так как фон является однородным
случайным полем, то
ограничена сверху только минимальным
рас-
единицам. Так как фон является однородным
случайным полем, то
ограничена сверху только минимальным
рас-
стоянием
между объектами. Их расположение
позволяет выбрать значение
![]() .
Количество
фрагментов границы влияет на вероятность
обнаружения ложной зоны. В экспериментах
использовалось
.
Количество
фрагментов границы влияет на вероятность
обнаружения ложной зоны. В экспериментах
использовалось
![]() .
Для вычисления оценок
,
,
применялись фрагменты границы, состоящие
из девяти пикселей. Это соответствует
квадратной окрестности с минимальным
радиусом
.
Для вычисления оценок
,
,
применялись фрагменты границы, состоящие
из девяти пикселей. Это соответствует
квадратной окрестности с минимальным
радиусом
![]() .
.
При
использовании
![]() в качестве оценки неизвестного среднего
значения
в качестве оценки неизвестного среднего
значения
![]() объекта максимальный шаг вычисляется,
в соответствии с Теоремой 4.2.2, по формуле
=
объекта максимальный шаг вычисляется,
в соответствии с Теоремой 4.2.2, по формуле
=![]() ,
то есть зависит от радиуса сглаживания
.
При указанных размерах проекций объектов
,
то есть зависит от радиуса сглаживания
.
При указанных размерах проекций объектов
![]() .
Поэтому максимальное значение
=9
достигается при минимальном радиусе
.
Следовательно,
.
Поэтому максимальное значение
=9
достигается при минимальном радиусе
.
Следовательно,
![]() квадратов. В ходе классификации 158
квадратов из этого числа были
классифицированы в качестве зон интереса
(реальных и ложных). Таким образом,
количество подлежащих сегментации
квадратов удалось уменьшить более, чем
в семнадцать раз.
квадратов. В ходе классификации 158
квадратов из этого числа были
классифицированы в качестве зон интереса
(реальных и ложных). Таким образом,
количество подлежащих сегментации
квадратов удалось уменьшить более, чем
в семнадцать раз.
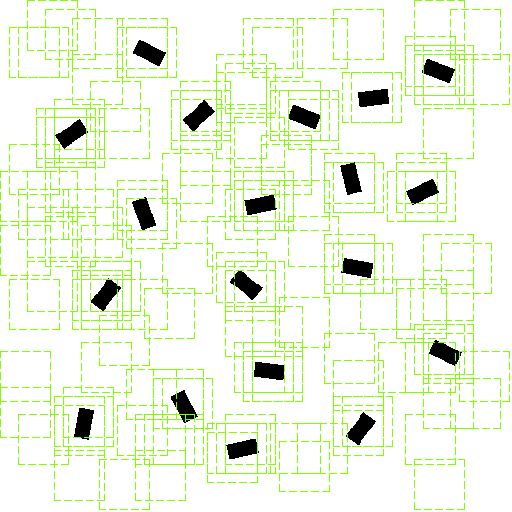
В
графической форме результаты поиска
вторым методом представлены на рисунке
4.2. Зону интереса удалось построить для
каждого объекта. Так как на этот раз для
каждого объекта в
![]() оказалось
по шесть зон, то число реальных зон в
равняется 114. Из них удалось обнаружить
только 54 зоны. Следовательно, относительная
частота правильной классификации зоны
интереса равняется 54/114=0.474. Относительная
частота ложного распознавания зоны
составляет (158-54)/(2704-114)=0.040. Отметим, что
при
из таблицы 3.1 следует, что вероятность
оказалось
по шесть зон, то число реальных зон в
равняется 114. Из них удалось обнаружить
только 54 зоны. Следовательно, относительная
частота правильной классификации зоны
интереса равняется 54/114=0.474. Относительная
частота ложного распознавания зоны
составляет (158-54)/(2704-114)=0.040. Отметим, что
при
из таблицы 3.1 следует, что вероятность
![]() ложного обнаружения зоны интереса
бернуллиевских сцен с нормальными
распределениями равняется 0.032. Так как
60 зон интереса оказались пропущены и
104 пустых квадрата ошибочно распознаны
в качестве зон, то относительная частота
ошибки классификации квадратов из
равняется 0.061.
ложного обнаружения зоны интереса
бернуллиевских сцен с нормальными
распределениями равняется 0.032. Так как
60 зон интереса оказались пропущены и
104 пустых квадрата ошибочно распознаны
в качестве зон, то относительная частота
ошибки классификации квадратов из
равняется 0.061.
Полученное
в эксперименте значение 0.474 относительной
частоты правильной классификации зон
интереса нельзя считать неудачей. В
самом деле, решение о том, что квадрат
является зоной интереса принимается
только при условии, что средняя яркость
,
вычисленная для центрального пикселя,
превышает все
,
.
Однако при шаге
![]() семейство
семейство
|
Рисунок 4.2 - Результаты поиска зон интереса на локально однородной сцене с использованием оценки ( , )
|
содержит
по шесть зон интереса для каждого
объекта. У более половины этих зон
условие
![]() ,
,
не выполняется потому, что окрестность
,
,
не выполняется потому, что окрестность
![]() частично или полностью состоит из
пикселей фона. С другой стороны, в
соответствии с Теоремой 4.2.2, для каждого
объекта в
присутствует зона интереса, хотя бы
одна, для которой выполняется условие
частично или полностью состоит из
пикселей фона. С другой стороны, в
соответствии с Теоремой 4.2.2, для каждого
объекта в
присутствует зона интереса, хотя бы
одна, для которой выполняется условие
![]() .
По Теореме 3.4.1 вероятность правильного
распознавания таких зон при достаточно
большом значении
равна, практически, единице. Для
рассматриваемой сцены зону интереса
удалось построить для каждого объекта
даже при минимальном значении
.
.
По Теореме 3.4.1 вероятность правильного
распознавания таких зон при достаточно
большом значении
равна, практически, единице. Для
рассматриваемой сцены зону интереса
удалось построить для каждого объекта
даже при минимальном значении
.
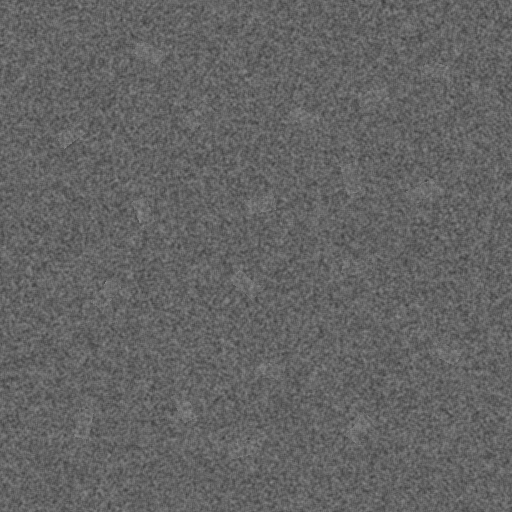
А
теперь рассмотрим результаты поиска
зон интереса на более сложной сцене. На
рисунке 4.3 представлено изображение
фрагмента локально однородной сцены,
который отличается от предыдущего
только величиной отношения сигнал/шум.
В самом деле, при уменьшении среднего
значения
![]() со 120 до 110 отношение сигнал/шум
со 120 до 110 отношение сигнал/шум
![]() уменьшилось с 1.0 до 0.5. Построение зон
интереса визуальным способом по такому
изображению требует заметных усилий и
времени.
уменьшилось с 1.0 до 0.5. Построение зон
интереса визуальным способом по такому
изображению требует заметных усилий и
времени.
К
сожалению, построить зону интереса для
каждого объекта, когда при вычислении
оценок
,
,
использовались фрагменты, содержащие
по 9 пикселей (это соответствуют
минимальному радиусу сглаживания
),
не удалось. Это означает, что для сцены,
сложность которой измеряется величиной
![]() ,
минимальная окрестность, состоящая из
девяти пикселей, не обеспечивает нужной
точности вычисления оценок неизвестных
средних значений. Поэтому были проведены
дополнительные эксперименты, в которых
использовались окрестности, из 25 и 49
пикселей, что соответствует радиусам
сглаживания
,
минимальная окрестность, состоящая из
девяти пикселей, не обеспечивает нужной
точности вычисления оценок неизвестных
средних значений. Поэтому были проведены
дополнительные эксперименты, в которых
использовались окрестности, из 25 и 49
пикселей, что соответствует радиусам
сглаживания
![]() и 3. Полученные результаты приведены в
таблице 4.1. Для каждого
указано количество
и 3. Полученные результаты приведены в
таблице 4.1. Для каждого
указано количество
Таблица 4.1 - Результаты поиска зон интереса по изображению локально
однородной
сцены (![]() )
вторым методом
)
вторым методом
(r, |
(1,9) |
(2,7) |
(3,5) |
n(h,w) |
2704 |
4356 |
8649 |
nQ |
180 |
451 |
1013 |
nA |
18 |
19 |
19 |
|
Рисунок 4.3 - Изображение локально однородной сцены (
|
![]() квадратов
в
,
количество
квадратов
в
,
количество
![]() квадратов из
,
классифицированных в качестве зон
интереса и количество
квадратов из
,
классифицированных в качестве зон
интереса и количество
![]() объектов, для которых удалось построить
зону интереса. Из представленных данных
следует, что при
и 3 удалось построить зоны интереса для
каждого объекта. Напомним, что количество
квадратов в семействе
на прямоугольном фрагменте высотой
и шириной
,
зависит от величины шага
.
При увеличении
в
объектов, для которых удалось построить
зону интереса. Из представленных данных
следует, что при
и 3 удалось построить зоны интереса для
каждого объекта. Напомним, что количество
квадратов в семействе
на прямоугольном фрагменте высотой
и шириной
,
зависит от величины шага
.
При увеличении
в
![]() раз
раз
![]() уменьшается в
уменьшается в
![]() раз.
раз.