

2.9.2. Електропривод деревообробних верстатів.
Для ремонту, виготовлення дерев’яних елементів с/г машин, реманенту,господарських будівель, тари застосовують лісопильні рами, кругло пиляльні, стругальні, фрезерні та інші верстати.
Лісопильні рами(пилорами) використовують для поздовжнього розпилювання колод деревини діаметром до 0,5м на дошки, бруси та інше довжиною від 2 до 8 м. Найбільшого розповсюдження набули стрічкові пилорами, зовнішній вигляд яких приведено на мал.16.2 . Привод здійснюється від АД з КЗ ротором , крім того є окремий привод на вертикальне переміщення робочого органу. Для заточки пилок використовується заточний автоматичний пристрій з електроприводом. Його вигляд приведений на мал.16.3.

Мал.16.2 Стрічкові пилорами

Мал.16.3 Електропривод заточного автоматичного пристрою

Мал.16.4Схема керування електроприводу заточного автоматичного пристрою
Окрім стрічкових пилорам в сільському господарстві використовувались вертикально-поздовжні лісопильні рами. Наближено потужність двигуна пилорами можна визначити :
Рдв.=( Fріз ·v)/( ηп ηпер), кВт, де
Fріз-зусилля різання,к Н ;
v-швидкість різання м/с.;
ηпер-ККД передачі;
ηп-ККД пилорами;
Fріз=Кріз.
S∑h· , кН, де
, кН, де
Кріз=0,11…0,14-коефіцієнт різання, що залежить від породи дерева;
S-товщина пилки, мм;
𝛥=3…8 мм-подача;
Н-хід пиляльної рамки, мм;
∑h=0,75dсер.N-загальна висота пропилу, мм, де
dсер-діаметр середнього поперечного перерізу колоди, мм;
N-кількість пилок.
Швидкість
різання: v= , де D-діаметр
кривошипа, мм; n-частота
обетрання, об/хв.
, де D-діаметр
кривошипа, мм; n-частота
обетрання, об/хв.
Круглопиляльні верстати- призначені для розпилювання колод і брусів і можуть мати одну(циркулярки) або декілька(багатопили) пилок. Електроприводи цих веврстатів індивідуальні, електродвигуни - АД з КЗ ротором. Зовнішній вигляд багатопила(станка з декількома пилами) показаний на мал.16.4.
Режим роботи таких станків залежить від подачі ( при безперервній подачі-тривалий). Для тривалого режиму роботи потужність двигуна можна визначити:
Р= , де
, де
Кріз=0,11…0,14-коефіцієнт різання, що залежить від породи дерева;
b-ширина пропилу, мм;
Н-висота припилу, мм;
v-швидкістьподачі,м/с ;
η1-ККД верстата(0,75…0,85), η2-ККД передачі.

мал.16.4. Станок багатопил
Електрична принципова схема кругло пиляльного станка Ц6 приведена на мал.16.6.
Робота схеми: після розгону двигуна спрацьовує реле контролю швидкості SR і контакт SR замикається. При зупинці за допомогою КМ2 двигун вмикається в режим гальмування противмиканням і коли швидкість обертання зменшиться до мінімальної,контакт SR розімкнеться , двигун зупиниться.
Стругальні верстати –призначені для стругання деталей і виробів з деревини на задану товщину. Бувають одно-, дво-, чотиристоронні стругальні верстати.
Потужність електродвигунів для приводу стругальних верстатів знаходиться в межах від 4 до 15 кВт.

 Мал.16.5
Верстати фугувальні
Мал.16.5
Верстати фугувальні
Верстати фугувальні мал.16.5 - застосовуються для обробки м'яких і твердих порід деревини і дозволяють виконувати стругання заготовок по направляючій планці. Фугувальні верстати можуть використовуватися як в домашніх умовах так і в умовах столярних цехів при дрібному і середньосерійному виробництві.
Токарний верстат по дереву Корвет-71
 Напруга
живлення 230 В
Напруга
живлення 230 В
Споживана потужність 370 Вт
Довжина обточування (РМЦ) 420 мм Діаметр обточування 250 мм.
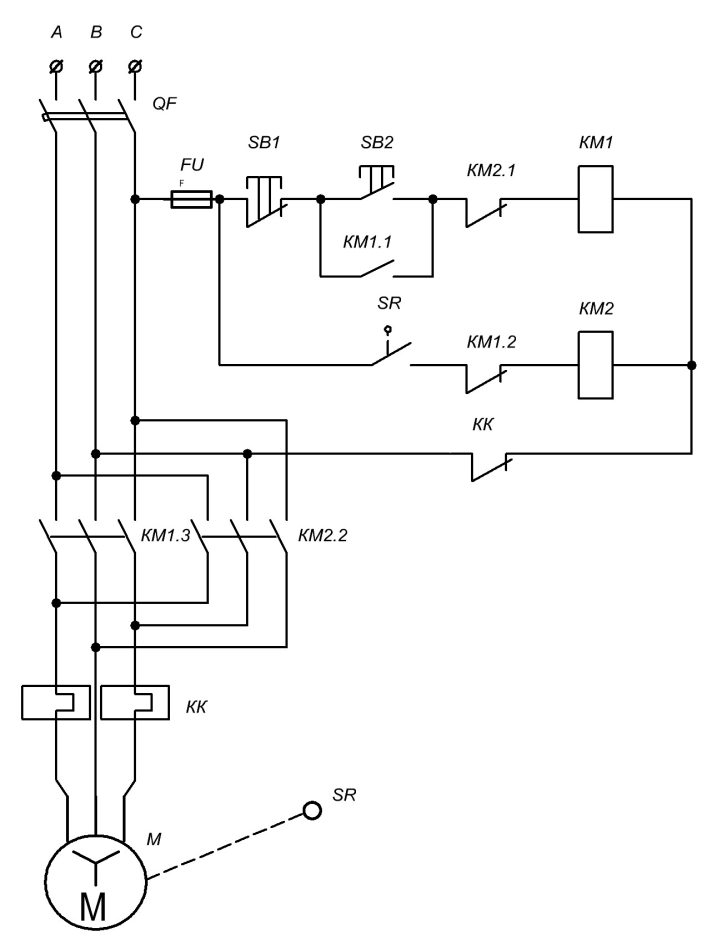
мал.16.6. Електрична принципова схема кругло пиляльного станка Ц6
Питання для самоперевірки.
1.Які верстати відносять до металообробних ?
2. Вибір потужності електродвигуна токарно-гвинторізного верстата.
3.Особливості електроприводу пилорам.