

3.2.2 Спосіб евольвентних різниць ( спосіб і.В.Гонікберга)
3.2.2.1 Основні положення методики зйомки
Суть методики в наступному:
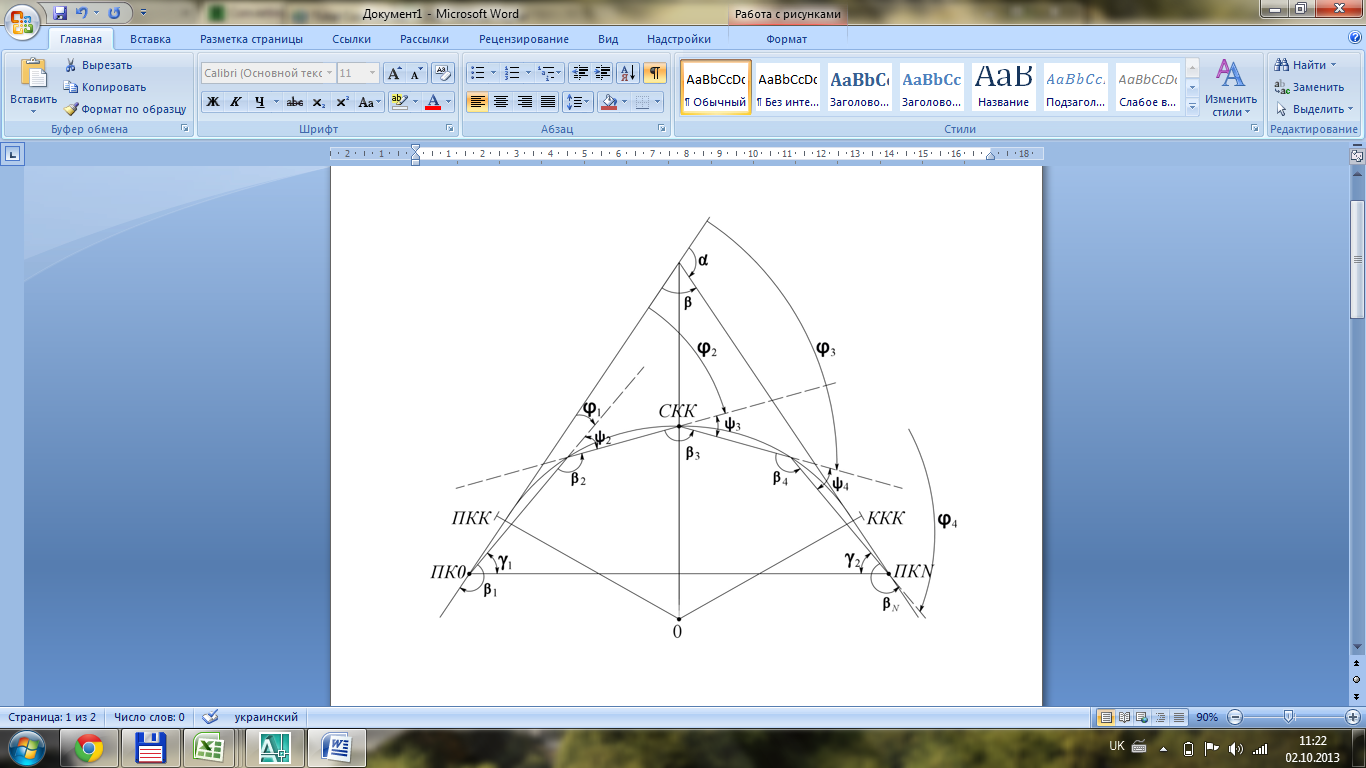
Рис.3 Спосіб І.В.Гонікберга
На колії, яку знімають лентою або рулеткою розмічають на зовнішній рейці 20-ти метрові хорди і 100 метрові, або рублені пікети. Початкову і кінцеву точку вибирають на прямих ділянках колії на віддалях 40-60 м від видимого початку і кінця кривої.
Технічним теодолітом виміряють кути βi і , при можливості, для контролю кути γ1, γ2. Одночасно з виміром кутів, на плюсових точках +20, +40, +60, +80 способом бокового нівелювання при
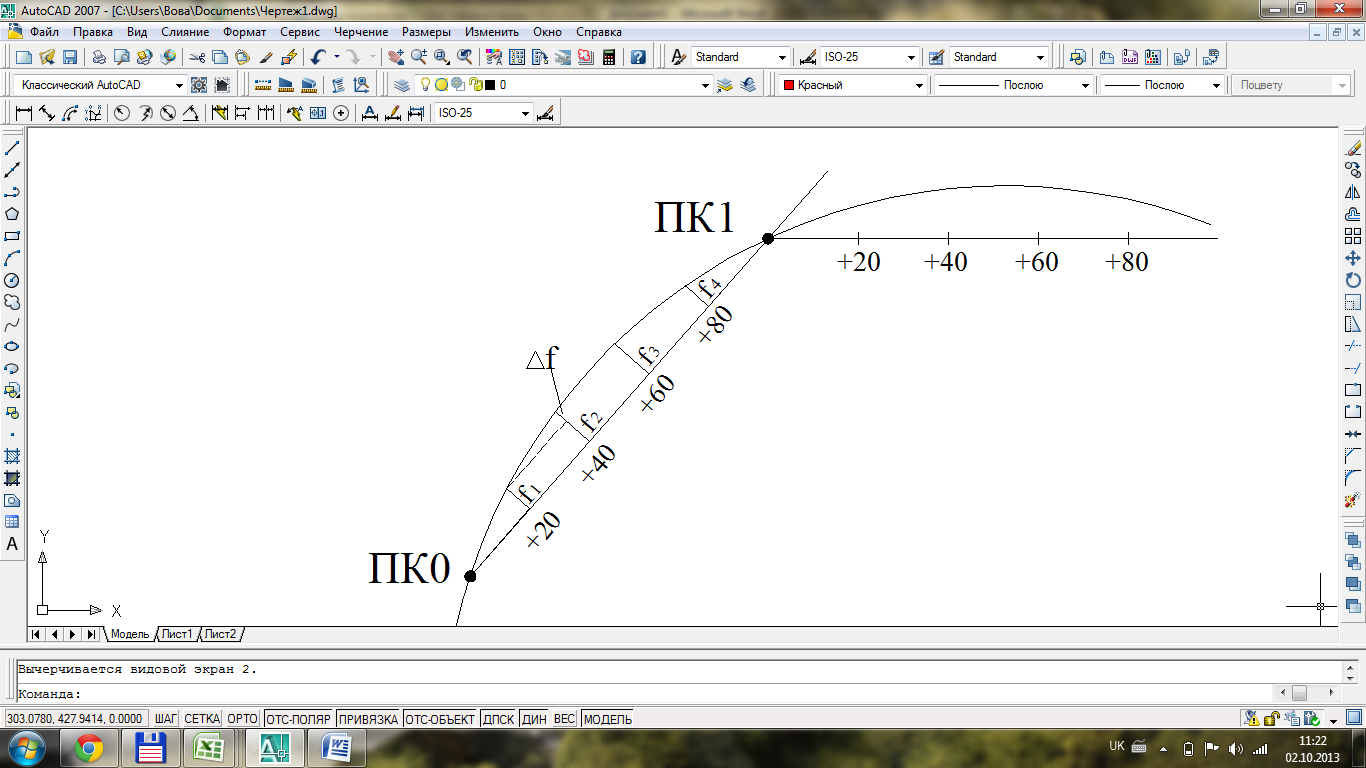
Рис.3 Зйомка плюсових точок
допомозі теодоліта і горизонтально встановленої рейки виміряють стрілки вигину кривої від хорди між пікетними точками. Рейку закріпляють спеціальним пристроєм на гранях головки рейки. Нульова позначка (“п’ятка”) рейки повинна співпадати з повздовжньою віссю рейки. Стрілки виміряють два рази в прямому і зворотному напрямках ( допустиме розходження – 5 мм.)
3.2.2.2 Розрахунок значень виміряних евольвент
За даними польових вимірів розрахунок евольвент виконують в наступному порядку:
Урівнюють кути у зімкнутому теодолітному ході.
На пікетах підраховують кути :
 ;
;
 ;
(3.15)
;
(3.15)
 =
=
…………………………………………
 ;
;
Підраховують виміряні значення евольвент на пікетах. Так як
 , то згідно формули (3.14):
, то згідно формули (3.14):
 ;
;
 (3.16)
(3.16)
………………………………………
 ;
;
Обчислення евольвент плюсових точок. Для обчислення евольвент плюсових точок користуються виміряними стрілками прогину. Приросток евольвенти на 20-ти метровий відрізок дорівнює:
ΔЕ=dφ-Δf = 20φ – Δf , (3.17)
де Δf – алгебраїчна різниця стрілок вигину на сусідніх точках.
Послідовно сумуючи величини ΔЕ знаходять евольвенти для точок +20, +40, +60, +80.
Так як в границях кожного пікету ΣΔf =0, то, відповідно в границях кожного пікету:
 ,
(3.18)
,
(3.18)
що і є контролем правильності обчислень.
3.2.2.3 Підбір радіуса проектної кривої
При підборі радіуса проектної кривої дотримуються наступних умов:
Загальний кут повороту цієї кривої, утворений лініями тангенсів повинен бути рівний проектному.
Проектна крива ( радіусом який ми підбираємо) повинна вписуватись в цей кут при мінімальних переміщеннях рейок.
В критичних точках ( звичайно, штучні споруди) переміщення повинні бути рівні нулю.
Для всієї кривої радіус можна знайти за формулою:
 ,
(3.19)
,
(3.19)
де
 - відповідно евольвента останньої точки
і загальний кут повороту від лінії
тангенса останньої хорди.
- відповідно евольвента останньої точки
і загальний кут повороту від лінії
тангенса останньої хорди.
Одержане значення R слід округлити до найближчого стандартного значення .
Для окремих хорд довжиною – b радіус кругової кривої можна знайти за формулою:
 (3.20)
(3.20)
Згідно формули (3.8) і (3.12) переміщення колій при рихтуванні в поточній точці М буде дорівнювати:
 =
= (3.21)
(3.21)
Якщо
 в
противному випадку назовні.
в
противному випадку назовні.
При
вписуванні перехідних кривих кругова
крива переміщається всередину кола на
величину ,
тому загальна величина переміщення
рейки при рихтуванні колії буде:
,
тому загальна величина переміщення
рейки при рихтуванні колії буде:
а) в
границях зміщеної кругової кривої -

б) в границях першої половини перехідної кривої від її з’єднання з прямою S=0 до точки де S=0,5l.
 .
(3.22)
.
(3.22)
в) в границях другої половини перехідної кривої від точки, де S=0,5l до точки примикання до кругової кривої
 )
(3.23)
)
(3.23)
3.2.2.4 Точність способу.
Точність
визначення величин Δl -
 залежить
від точності підрахунку дожин евольвент
існуючої колії -
залежить
від точності підрахунку дожин евольвент
існуючої колії - .
.
Для пікетних точок :
 (3.24)
(3.24)
Приймемо,
що рублені пікети відсутні :
 ,
тоді
,
тоді

 (3.25)
(3.25)
СКП функції (3.25) :

+ ,
(3.26)
,
(3.26)
Для кінця кривої:
 (3.27)
(3.27)
 (3.28)
(3.28)
За умови, що

З
врахуванням формул (3.27) і (3.28) для кінця
ходу ( і приймаючи
і приймаючи
 ,
одержимо:
,
одержимо:
 (3.29)
(3.29)
При можливості вимірів кутів γ і зрівнюванні ходу:
(3.30)
Якщо
прийняти R=1000 м, K=400м, n=4,

 ,
,
То за
формулою (3.29) одержимо
 , а за формулою (3.30)
, а за формулою (3.30)
 , тобто в урівненому ході похибка
зменшується майже в 1,5 рази.
, тобто в урівненому ході похибка
зменшується майже в 1,5 рази.
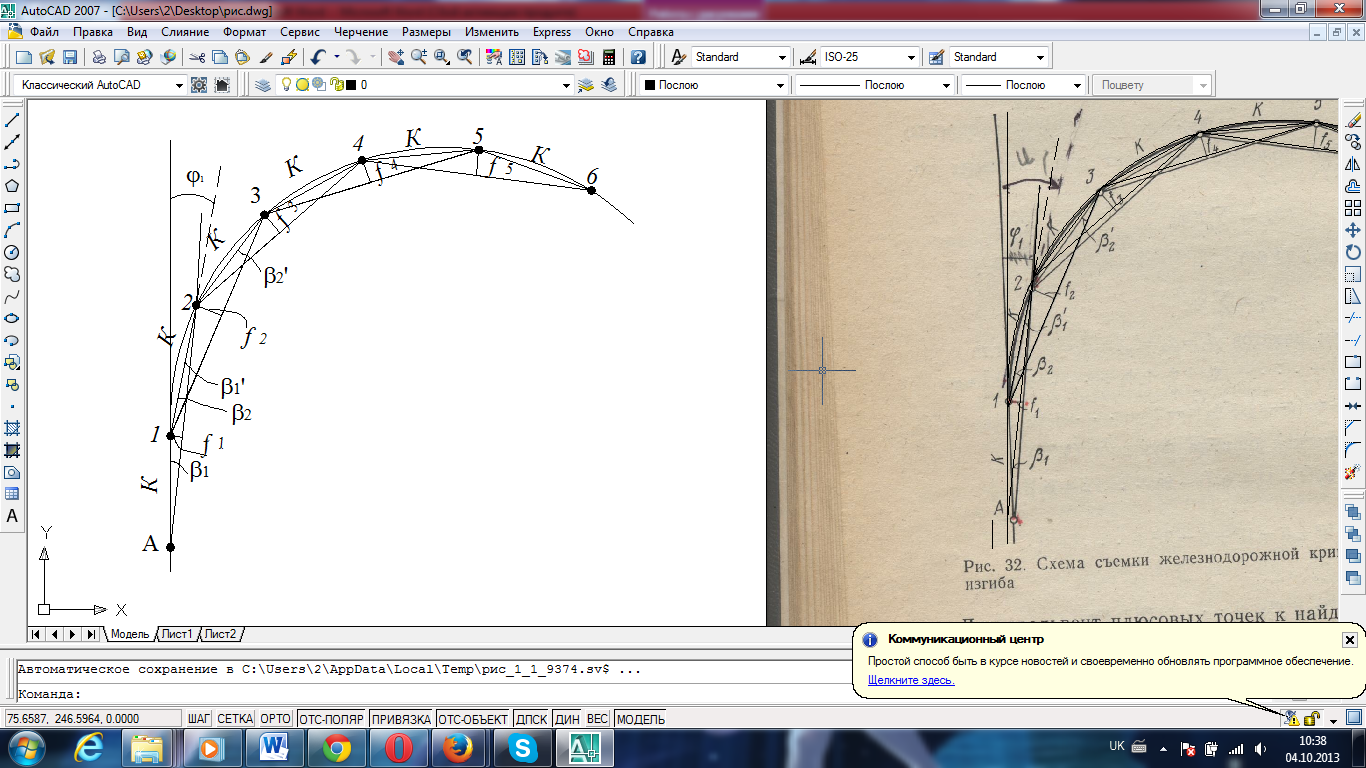
Рис. 3.8 Спосіб стріл вигину.