

3.3.2. Регулятор мощности
Регулятор мощности удерживает установленный крутящий момент М (Н•м) на постоянном уровне. В сочетании с постоянной установленной частотой вращения n (мин-1) получается функция регулирования мощности. Заданной механической мощности привода Р = М • n (кВт) соответствует гидравлическая мощность Р = Q • р (кВт). Так как рабочее давление р (бар) зависит от нагрузки, величина подачи Q (л/мин) может изменяться путем изменения угла наклона. Подобно вычислительному устройству регулятор постоянно перемножает давление на подачу, сравнивает результат с установленным значением и соответственно изменяет угол наклона. Регулятор мощности может подстраиваться. В начале процесса регулирования угол наклона максимален. Конечное положение зависит от величины максимального давления. Оба конечных значения могут ограничиваться с помощью упоров. Необходимо быть осторожным: при увеличении максимального установленного значения возникает опасность кавитационных процессов в насосе, а для гидромоторов — опасность превышения номинальной частоты вращения. Если минимальная установка угла превышена, возможна перегрузка приводного двигателя в области высокого давления.
-
Управляющий золотник
-
Плечо рычага (изменяемое)
-
Рабочее давление
-
Гидроцилиндр управления
-
Сервопоршень
-
Коромысло
-
Регулируемое усилие пружины
-
Плечо рычага (постоянное)
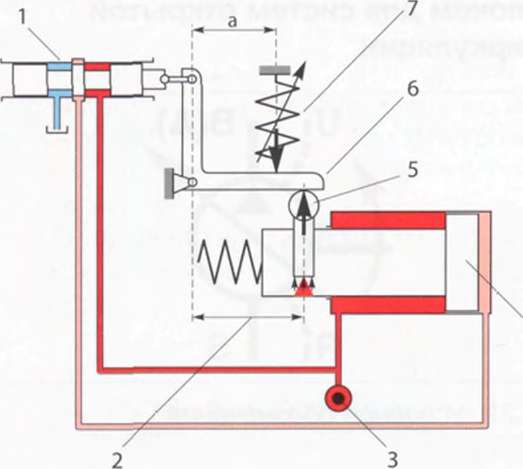
Рис. 22. Регулятор мощности
Рабочее давление через сервопоршень воздействует на коромысло (см. рис. 22). Регулируемое извне усилие пружины оказывает сопротивление этому воздействию, определяя настройку по мощности. Если рабочее давление р превышает допустимое значение, вычисленное по формуле Р = Q • р (кВт), то через коромысло перемещается управляющий золотник, в результате чего угол наклона изменяется. Подача насоса уменьшается до тех пор, пока результат Q • р вновь не будет соответствовать имеющейся в наличии мощности. Достигается идеальная характеристика (гипербола) мощности, и частота вращения не превышает номинальных значений, поскольку привод «отрегулирован по мощности». При уменьшении давления подача с помощью возвратной пружины увеличивается до своего максимально допустимого значения.
3 .3.3. Регулируемый сдвоенный насос с наклонными блоками
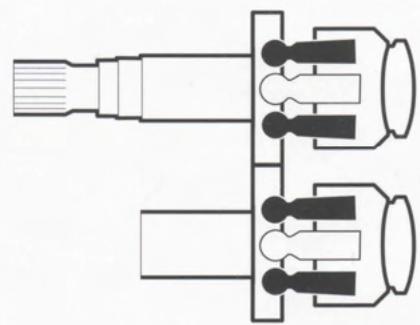
Рис. 23. Основной принцип конструкции
Рис.
24.
Регулируемый сдвоенный насос с общим
приводным валом
Использование комбинации из двух регулируемых насосов особенно перспективно в мобильной технике, поскольку здесь требуется лишь один приводной вал. Кроме того, появляется возможность установки на передаточном механизме дополнительных (вспомогательных) насосов.
При двух параллельных системах циркуляции применяется сдвоенный насос с суммируемой регулировкой мощности, в котором общая мощность привода распределяется в зависимости от давления на обе системы циркуляции.
В данную систему в качестве измерительного подается сигнал с суммирующего золотника. Идеальная гиперболическая характеристика достигается в том случае, когда действующие на коромысло регулятора мощности силы находятся в равновесии. Крутящий момент, создаваемый усилием FH и плечом s, может достигать лишь значения, равного моменту, создаваемому усилием пружины FF на жестко фиксированном плече а. Так как, гидросистема задает рабочее давление, а насос может изменять только свою подачу Q, превышение допустимого уровня мощности вызывает автоматическое уменьшение угла наклона (подачи насоса). При этом плечо s уменьшается до тех пор, пока гидравлический крутящий момент вновь не станет равным механическому крутящему моменту.
На практике применяются раздельные или объединенные системы регулирования. Типичные варианты, например, регулирование граничной мощности, трехконтурное регулирование, Load-sensing (чувствительность к нагрузке) и т.д.
Регулятор
мощности (гиперболический регулятор)
-
Настраиваемое усилие пружины
-
Суммирующий золотник
-
Усредненный высоконапорный сигнал
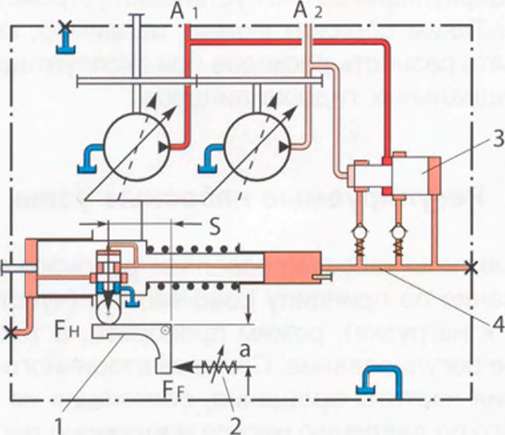
Рис. 25. Суммирующий регулятор мощности