

1.2 Кинематический анализ механизмов
При кинематическом анализе механизма движение входных звеньев задано и определяются положения, траектории, скорости и ускорения выходных и промежуточных звеньев.
Полученные кинематические характеристики механизма используются при динамическом анализе, когда определяются силы, действующие на звенья.
Определение положения звеньев и построение траекторий отдельных точек звеньев получают последовательным построением различных положений элементов механизма. Например, циклическое движение входного звена кривошипа разбивают на равные промежутки – на 6 или 12 частей.
Затем достраивают к положениям кривошипа положения других звеньев механизма.
Построения выполняют
в масштабе:
![]() или
или
![]() .
.
Полученный чертеж положений звеньев механизма, соответствующих полному циклу его движения, называют планом положений механизма. Непрерывные линии, соединяющие последовательные положения одноименных точек дают различные траектории движения этих точек.
План положений механизма и траектории движений точек определяют размеры и занимаемую площадь механизмов и являются основой для последующего анализа скоростей и ускорений звеньев (кинематический анализ).
Определение основных кинематических характеристик механизма - линейных и угловых скоростей и ускорений звеньев - выполняют аналитическим, графическим и графоаналитическим методами.
Аналитический метод имеет высокую точность решения, но очень трудоемок. Широко используется с применением ЭВМ для роботов и манипуляторов.
Два других метода – графический и графоаналитический - просты и наглядны.
Графический метод определения скоростей и ускорений осуществляется с помощью графического дифференцирования диаграммы перемещений, получаемой из плана положений механизма.
1.2.1 Анализ рычажных механизмов
Построение планов положений механизма начинается с построения нулевого положения и крайнего левого положения ползуна. Затем траекторию кривошипа (траектория точки А) разбивают на несколько равных частей, соответствующих равным интервалам времени (6, 12 или 24). Соединяя точку О1 с различными положениями получаем соответствующие положения кривошипа Ао, А1, А2,…А6. Методом засечек осуществляем разметку следующих звеньев – 3, 4 и 5 и строим их положения Во, В1, В2,…; Со, С1, С2,… .
Диаграмма перемещения точки С является графическим изображением закона ее движения. Построив 6 планов положения механизма, получим 6 положений точки С выходного звена. Проводим оси координат (рисунок 1.19, а).
По оси абсцисс
откладываем отрезок
![]() произвольной длины, представляющий
собой в масштабе μt
время t(с)
одного периода (время одного полного
оборота выходного звена)
произвольной длины, представляющий
собой в масштабе μt
время t(с)
одного периода (время одного полного
оборота выходного звена)
![]()
где n1 – частота вращения выходного звена, мин-1;
ω1 – угловая скорость входного звена, с-1.
Масштабный коэффициент времени:
![]()
где
![]() = 120 мм – отрезок на чертеже (рисунок
1.19, а).
= 120 мм – отрезок на чертеже (рисунок
1.19, а).
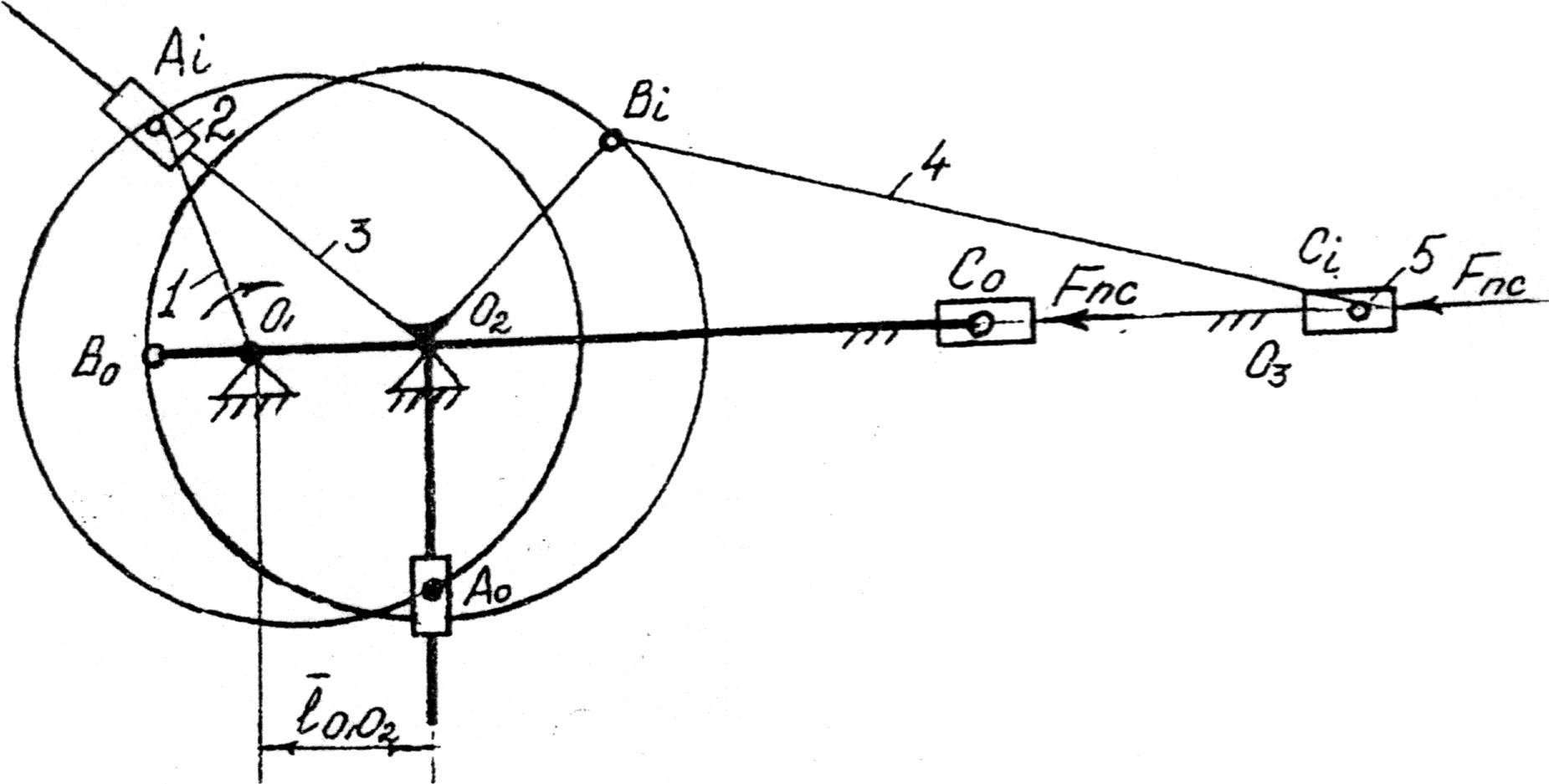
Рисунок 1.17
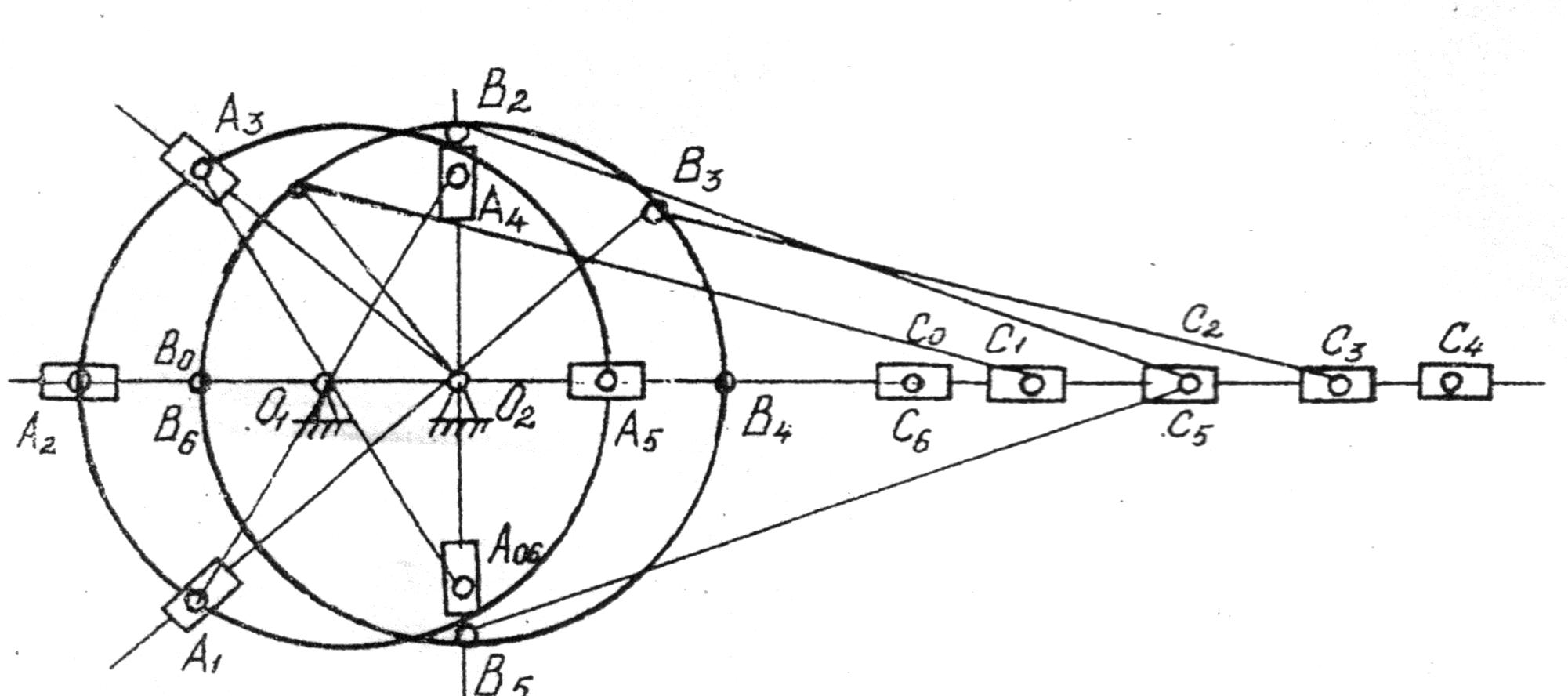
Рисунок 1.18
Отрезок разбиваем на 6 равных частей соответствующих шести положениям механизма (в курсовом проектировании на 12 равных частей). Через размеченные точки 0, I, II, III, IV, V, VI проводим прямые линии, параллельные оси ординат, на которых откладываем величину перемещения точки С от нулевого положения до положения в данный момент (до I, II, III, IV, V, VI положений). В рассматриваемом случае (рисунок 1.17) за начало отсчета выбрана точка Со, то есть положение точки С при t = 0. На траектории точки С направление вправо принято положительным.
Если перемещения
![]() ,
,
![]() и так далее на графике перемещения
(рисунок 1.19, а)
откладывать прямо с плана положений
механизма (рисунок 1.18), то масштабный
коэффициент диаграмм перемещения будет
равен масштабному коэффициенту плана
положений
и так далее на графике перемещения
(рисунок 1.19, а)
откладывать прямо с плана положений
механизма (рисунок 1.18), то масштабный
коэффициент диаграмм перемещения будет
равен масштабному коэффициенту плана
положений
![]() .
.