

Механический смысл производной
Пусть
прямолинейное движение материальной
точки задано законом S = S(t). Путь, который
проследует точка за время ∆t равен
∆S = S(t+∆t)-S(t).
Средняя скорость есть ![]() ,
мгновенная скорость
,
мгновенная скорость ![]() .
.
Пример.
Пусть
дан закон движения материальной точки ![]() ,
найти скорость точки через t = 3 сек.
,
найти скорость точки через t = 3 сек.
![]() .
.
Дифференциал функции
Пусть задана функция y = f(x) на интервале (a,b). Функция y = f(x) дифференцируемой в точке x, если ∆y можно представить с помощью следующего выражения:
∆y = A∆x + α(∆x)∆x,
где
А= const при фиксированном х и ![]() при
.
при
.
Теорема. Для дифференцируемости функции в точке х необходимо и достаточно, чтобы функция имела в этой точке конечную производную.
Дифференциалом
функции y = f(x) называется выражение
вида dy=A![]() -
это главная линейная часть приращения
∆y ,
на основании предыдущей теоремы
-
это главная линейная часть приращения
∆y ,
на основании предыдущей теоремы ![]() ,
обозначив дифференциал независимой
переменной через dx=∆x,
получим выражение для дифференциала
функции:
,
обозначив дифференциал независимой
переменной через dx=∆x,
получим выражение для дифференциала
функции:
![]() .
.
Геометрический смысл дифференциала виден из следующего рисунка
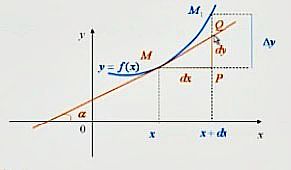
![]() ,
т.е. дифференциал функции равен отрезку
PQ это приращение ординаты касательной,
а приращение функции ∆y это
отрезок
,
т.е. дифференциал функции равен отрезку
PQ это приращение ординаты касательной,
а приращение функции ∆y это
отрезок ![]() .
.
Формулы дифференцирования
|
|
|
|
|
|
Таблица производных
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

Производная сложной функции
Если y = f(x) и u = u(x), то есть y=f[u(x)] сложная функция, где функции f(u) и u(x) имеют производные, то
![]()
это правило дифференцирования сложной функции.
Пример.
![]()
Производная обратной функции
Пусть
задана функция y = f(x), тогда определена
обратная функция x = ϕ(y).
Для функции y = 5x обратная функция ![]() ,
для функции
,
для функции ![]() обратная
функция
обратная
функция ![]() .
Пусть функция y = f(x) возрастает или
.
Пусть функция y = f(x) возрастает или
убывает на (a,b) и непрерывна, тогда существует обратная функция x = ϕ(y) и ее производная
![]() .
.
Примеры.
Найти производную обратной тригонометрической
функции y = arcsinx. Обратная функция x
= siny и ![]() ,
по формуле для обратной функции
,
по формуле для обратной функции ![]() .
.
Найдем
функции
y = arctgx.
Обратная функция x = tgy,  .
.
3.Теория интегралов
Основные методы интегрирования
Определение интеграла, определенный и неопределенный интеграл, таблица интегралов, формула Ньютона-Лейбница, интегрирование по частям.
Неопределенный интеграл
|
F' (x) = f(x). (3.1)
Нахождение всех первообразных для данной функции называется ее интегрированием. Неопределенным интегралом функции f(x) на данном промежутке Х называется множество всех первообразных функций для функции f(x); обозначение -
∫ f(x) dx.
Если F(x) - какая-нибудь первобразная для функции f(x), то
∫ f(x)dx = F(x) + C, (3.2)
где С - произвольная постоянная.
Таблица интегралов
Непосредственно из определения получаем основные свойства неопределенного интеграла и список табличных интегралов:
1) d ∫ f(x)=f(x)dx,
2) ∫df(x)=f(x)+C,
3) ∫af(x)dx=a ∫f(x)dx (a=const),
4) ∫(f(x)+g(x))dx= ∫f(x)dx+ ∫g(x)dx.
Список табличных интегралов
1. ∫x dx = x+1/( + 1) +C; ( ≠ -1).
2.![]() = ln x +C.
= ln x +C.
3. ∫ ax dx = ax/ln a + C (a>0, a ≠1).
4. ∫ex dx = ex + C.
5. ∫sin x dx = cos x + C.
6. ∫cos x dx = - sin x + C.
7.![]() = arctg x
+ C.
= arctg x
+ C.
8.![]() = arcsin x
+ C.
= arcsin x
+ C.
9.![]() = tg x
+ C.
= tg x
+ C.
10.![]() =
- ctg x
+ C.
=
- ctg x
+ C.
Замена переменной
Для интегрирования многих функций применяют метод замены переменной, или подстановки, позволяющий приводить интегралы к табличной форме.
Если функция f(z) непрерывна на [, ], функция z =g (x) имеет на [a,b] непрерывную производную и α ≤ g(x) ≤ β, то
∫ f(g(x)) g' (x) dx = ∫f(z) dz, (3.3)
причем после интегрирования в правой части следует сделать подстановку z=g(x).
Для доказательства достаточно записать исходный интеграл в виде:
∫ f(g(x)) g (x) dx = ∫ f(g(x)) dg(x).
Например:
1) ![]() ;
;
2)![]() .
.