

7 Расчет переходных процессов
Моделирование переходных процессов осуществляем с помощью системы MATLAB 7.0 по структурной схеме показанной на рис.8. Структурная схема, подготовленная к моделированию, показана на рис.9.
Переходные процессы рис10-12.
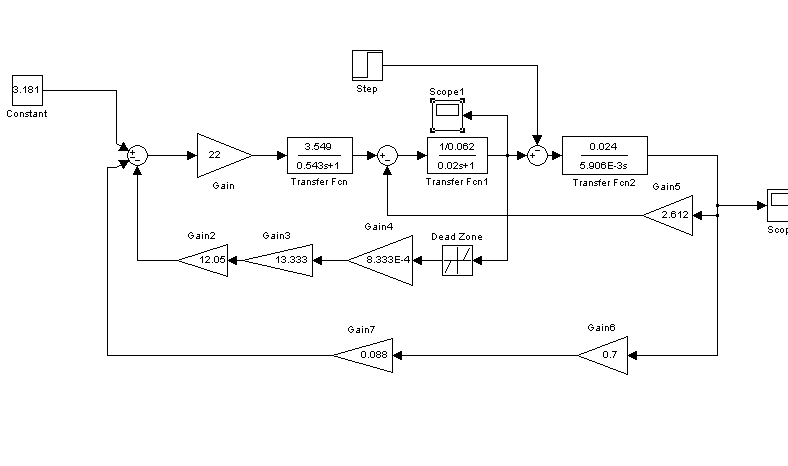
Рис.9. Математическая модель исследуемой системы
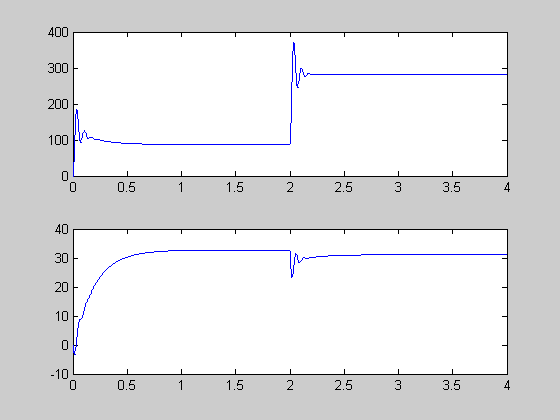
Рис.10 Переходные процессы тока и скорости при пуске на скорость входа в металл и наброс нагрузки
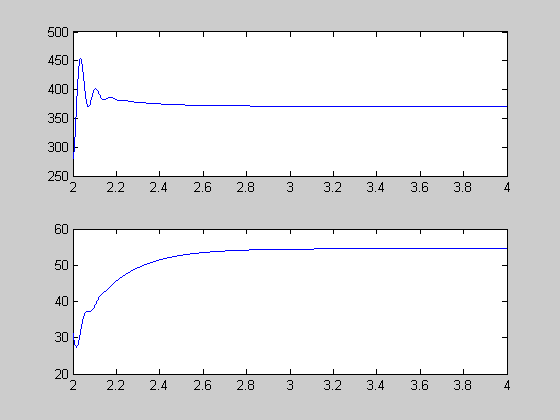
Рис.11 Переходной процесс разгона до рабочей скорости
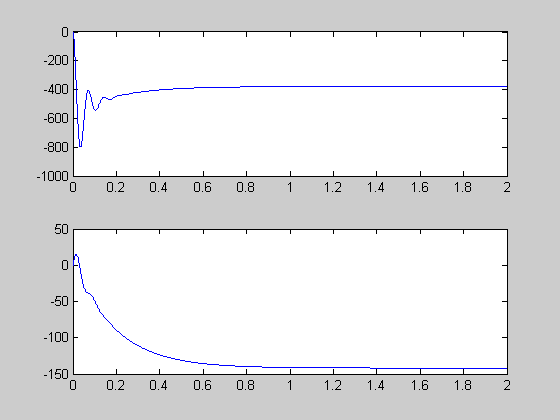
Рис.12. Переходной процесс системы при реверсе.
8. Составление принципиальной схемы управления
Регулирование скорости в данной системе реализовано в функции пути. Схема расположения путевых переключателей приведена на рис. 13.
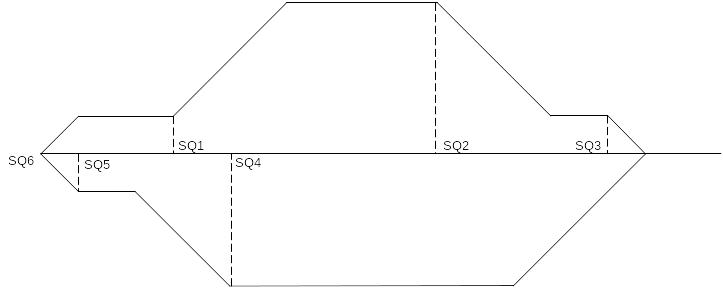
Рис.13. Расположение путевых выключателей
Принципиальная схема привода показана на рис.14.
Принцип автоматического управления заключается в том, что на разных промежутках участка на вход тиристорного преобразователя подаётся требуемое напряжение задания.
Рассмотрим замкнутый контур регулирования скорости. Обратную связь по скорости реализуется с помощью тахогенератора BR1 и резисторного делителя на резисторах R8, R7. Сигнал обратной связи по скорости подаётся на вход суммирующего усилителя DA1.
Обратная связь по току реализована с помощью шунта, выпрямительного моста VD2 и компаратора DA2. Который в случае превышения тока отсечки формирует сигнал обратной связи по току. Сигнал обратной связи по току подаётся на вход суммирующего усилителя DA1.
Схема автоматики реализована на контакторно-релейной аппаратуре. Перед запуском рабочего цикла схему автоматики необходимо подготовить. Подготовка к запуску включает в себя следующее: включение автоматов SF1 и SF2, запуск гонного двигателя. Запуск гонного двигателя осуществляется нажатием кнопки SB1. Контакты которой включают реле К1, которое включает контактор КМ1. Через контактор КМ1 напряжение подаётся на гонный двигатель, реле К4 и тиристорный преобразователь. Реле К4 включает остальную часть схемы автоматики.
Запуск двигателя осуществляется нажатием кнопки SB2, контакты которой включают реле К6, реле К6 подключает реле К7, которое в свою очередь подаёт на вход суммирующего усилителя напряжение задания на скорость врезания. После того как стол достигнет путевого выключателя SQ1 включится реле К8 которое отключит реле К7 и подаст на вход суммирующего усилителя напряжение задания соответствующее рабочей скорости. Потом стол переедет путевой выключатель SQ2 который включит реле К9, которое отключит реле К8 и подаст на вход суммирующего усилителя напряжение скорости выхода из металла. Потом на скорости выхода из метала стол переезжает концевой выключатель который включает реле К10, которое отключает реле К9. После чего система автоматики находится в ожидании нажатии кнопки SB3, которая включает режим реверса.
Режим реверса аналогичен работе автоматики при прямом ходе.
Защита гонного двигателя от перегрузки осуществляется с помощью тепловых реле К2 и К3, контакты которых отключают реле К1, что ведет к отключению контактора КМ1, который отключает гонный двигатель от сети.
Защита от максимального тока гонного двигателя реализована с помощью автомата SF2.
В случае отключения гонного двигателя автоматически снимается напряжение с тиристорного выпрямителя и отключается реле К4, которое своим отключением запрещает работу схемы автоматики (попросту обесточивает её).
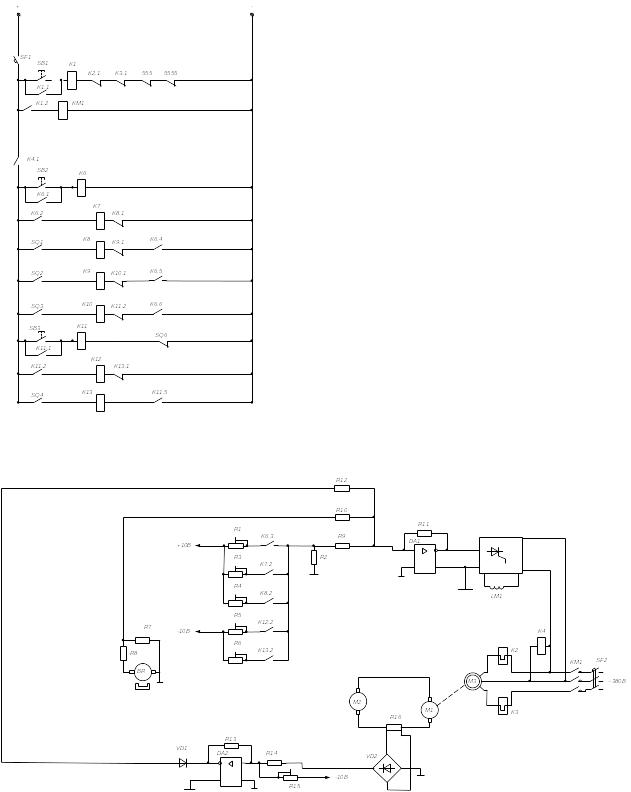 Рис.14.
Принципиальная схема управления
Рис.14.
Принципиальная схема управления