

5.3 Определение передаточной функции двигателя
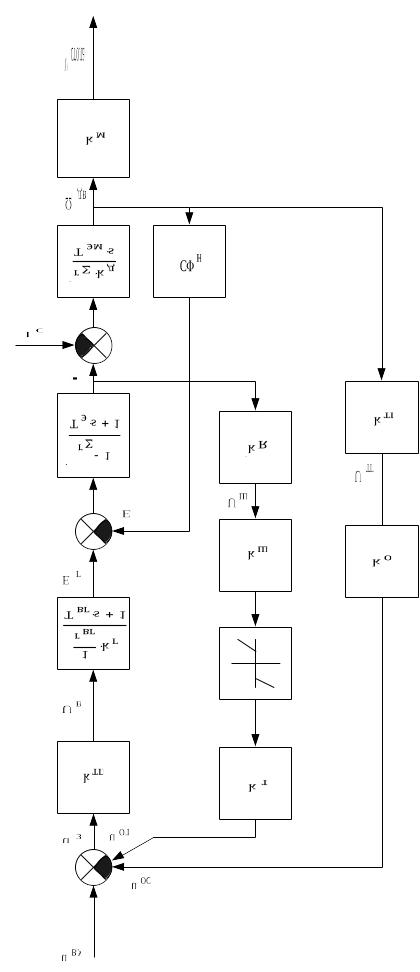
Из курса ТАУ известно что двигатель постоянного тока независимого возбуждения можно представить в виде структурной схемы показанной на рис.7.
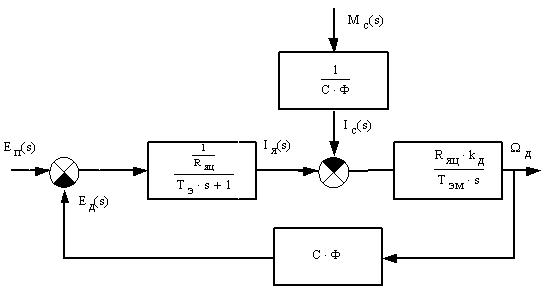
Рис.7. Структурная схема двигателя
Рассчитаем неизвестные коэффициенты:
Электромагнитная постоянная времени двигателя:
 с,
с,
где ![]() - суммарная индуктивность якорной цепи;
- суммарная индуктивность якорной цепи;
 Гн
- индуктивность якорной цепи двигателя;
Гн
- индуктивность якорной цепи двигателя;
 Гн
- индуктивность якорной цепи генератора;
Гн
- индуктивность якорной цепи генератора;
![]() Ом
- суммарное сопротивление якорной цепи.
Ом
- суммарное сопротивление якорной цепи.
Электромеханическая постоянная времени:

Коэффициент передачи двигателя:
![]()
5.4 Определение параметров обратной связи по скорости
В качестве датчика тока выбираем тахогенератор ТД-101, имеющий следующие технические характеристики:
Номинальное напряжение:
 В
ВНоминальная частота вращения:
 об/мин
(157,08 рад/с)
об/мин
(157,08 рад/с)
Коэффициент передачи тахогенератора:
Так как двигатель работает с постоянным номинальным потоком, то его скорость не будет превышать номинальную, поэтому максимальное выходное напряжение тахогенератора
![]() В.
В.
В качестве суммирующего усилителя, на вход которого подается сигнал обратной связи, используется операционный усилитель, на вход которого можно подавать напряжение не более 10В.
Поэтому сигнал обратной связи необходимо ослабить введением коэффициента ослабления:
Обратную связь по скорости будем считать безынерционной, тогда передаточная функция контура обратной связи будет иметь вид:
![]()
5.5 Расчет параметров обратной связи по току
В данной системе используется обратная
связь по току для ограничения тока.
Данная связь является дискретной и
вступает в действие только при превышении
током некоторого значения - тока отсечки
![]() .
.
Нам необходимо ограничить ток на
максимально допустимом для двигателя
уровне. Принимаем ток стопорения равным
![]() ,
А, а ток отсечки 900 А.
,
А, а ток отсечки 900 А.
Стандартное напряжение, на которое
выпускаются шунты
![]() В. Таким образом напряжение, снимаемое
с шунта при токе, равном току отсечки
равняется
В. Напряжение, снимаемое с шунта мало,
поэтому его необходимо усилить до 10 В
операционным усилителем с коэффициентом
усиления
В. Таким образом напряжение, снимаемое
с шунта при токе, равном току отсечки
равняется
В. Напряжение, снимаемое с шунта мало,
поэтому его необходимо усилить до 10 В
операционным усилителем с коэффициентом
усиления
![]() .
При дальнейшем увеличении тока якоря
(
.
При дальнейшем увеличении тока якоря
(
![]() )
на вход системы подается разность
напряжений
)
на вход системы подается разность
напряжений
![]() :
напряжения, снимаемого с шунта
:
напряжения, снимаемого с шунта
![]() и напряжения
и напряжения
![]() ,
устанавливаемого потенциометром RP1.
Обратная связь должна вступать в действие
при напряжении, снимаемом с шунта равном
10 В, для этого напряжение
должно равняться 10 В . При токе стопорения
,
устанавливаемого потенциометром RP1.
Обратная связь должна вступать в действие
при напряжении, снимаемом с шунта равном
10 В, для этого напряжение
должно равняться 10 В . При токе стопорения
![]() А напряжение обратной связи по току
равно
А напряжение обратной связи по току
равно
 В.
При этом, если на вход системы подано
максимальное задающее напряжение 10 В,
то для того чтобы полностью уравновесить
задающее напряжение необходимо чтобы
сигнал обратной связи по току
В.
При этом, если на вход системы подано
максимальное задающее напряжение 10 В,
то для того чтобы полностью уравновесить
задающее напряжение необходимо чтобы
сигнал обратной связи по току
![]() тоже равнялся 10 В, т.е. необходимо ввести
дополнительно усилитель с коэффициентом
усиления
тоже равнялся 10 В, т.е. необходимо ввести
дополнительно усилитель с коэффициентом
усиления
![]() .
.
Для анализа переходных процессов обратную связь по току удобно представить в качестве нелинейного звена с зоной нечувствительности.
Коэффициент передачи шунта по току:
5.6. Определение параметров механизма
Передаточная функция механизма:

По полученным данным можно составить структурную схему замкнутой системы регулировки скорости, она показана на рис.8
6. Расчет статических характеристик замкнутой системы
Статические характеристики замкнутой системы построим с учетом обратных связей по току и скорости.
Запишем уравнения, описывающие электромеханические процессы в приводе:
![]() (*)
(*)
![]() (**)
(**)
![]() (***)
(***)
Подставляя уравнения (**) и (***) в (*) получаем:

Выразим из данного выражения
![]() ,
с учетом того, что ток ниже тока отсечки,
т.е.
,
с учетом того, что ток ниже тока отсечки,
т.е.
![]() получим:
получим:

Используя данное выражение, рассчитаем напряжения задания для различных участков работы привода.
Работа на скорости врезания в металл:
![]() Работа
под нагрузкой
Работа
под нагрузкой
![]()
Реверсирование:
![]() Реверсирование
на скорости возврата:
Реверсирование
на скорости возврата:
![]()