

5. Порядок выполнения лабораторной работы
Задание 1. Изучение стенда. Выполняется при подготовке к работе с использованием настоящего описания.
Задание 2. Конфигурирование контроллера.
1. В режиме «Руч» с помощью ИМ устанавливаем на выходе ЛАТРа напряжение 100 В, воздействуя на ключ «М-0-Б» с контролем по вольтметру 28. Дожидаемся выхода объекта на стационарный режим.
2. Запускаем CoDeSys/Файл/Создать. Появляется окно «Настройка целевой платформы». В поле «Конфигурация» указываем PLC150.U-L (стенды 1-5) или PLC150.I-L (стенд 6). В окне «Новый программный компонент (POU)» в графе «Имя нового POU» оставляем “PLC_PRG”, язык реализации - CFC. Тип POU – программа.
3. Конфигурирование областей ввода-вывода контроллера. Во вкладке «Ресурсы» (рис.2) входим в пункт «Конфигурация ПЛК» (рис. 2).
|
Рис. 2. Расположение вкладок компонентов CoDeSys.
|
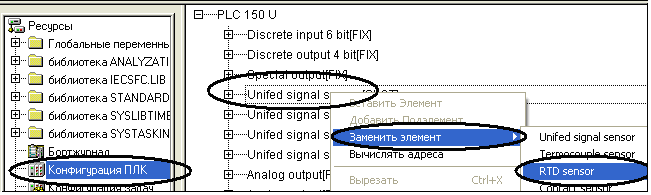
Рис.3. Конфигурирование входов ПЛК.
3.1. Отмечаем пункт “Unified signal sensor” для аналогового входа ПЛК, на который приходит сигнал от термометра сопротивления. По проекту это вход 1. Щелкаем правой кнопкой мыши, выбираем «Заменить элемент», затем - RTD sensor (рис.3). В графе «Значение» выбираем r428_50 (рис. 4), что соответствует НСХ 50М.
|

Рис.4. Конфигурирование входа для термометра сопротивления (RTD).
Вводим имя переменной для этого входа: открываем пункт «RTD sensor», щелкаем левой кнопкой мыши (ЛК) по первому подпункту «АТ», в поле вводим имя переменной, например, «PV» (рис. 5).
|

Рис. 5. Конфигурирование входа RTD (продолжение).
3.2. Конфигурируем вход для сигнала положения РО. Отмечаем пункт “Unified signal sensor”, соответствующий входу, к которому подключен датчик положения (по проекту - третий). Вводим имя переменной, например, «MV». Во вкладке «Параметры модуля» для строки «Type of sensor» выбираем «U0_1», далее вводим Ain low = 0, Ain high = 100.
4. Открываем вкладку «Визуализация» (рис.2), щелкаем правой кнопкой мыши. В появившемся меню выбираем «Добавить объект». Вводим имя визуализации «Lab1», размещаем объект «Тренд» и четыре объекта «прямоугольник»: два для вывода данных и два для надписей. Расположение объектов в меню показано на рис. 6.
|

Рис. 6. Меню создания визуализации. Расположение объектов.
5. Конфигурируем элементы визуализации. Двойным щелчком ЛК открываем 1-ый элемент «Прямоугольник». Для категории «Текст» в поле «Строка» вводим формат %3.2f. Для категории «Переменные» в поле «Выв_текста:» вводим имя переменной, заданное ранее для температуры печи (PV), поставив перед ним точку (признак глобальной переменной).
Другой вариант (с помощью «Ассистента ввода»): устанавливаем курсор в поле ввода, нажимаем F2, выбираем переменную из списка; в данном случае переменные находятся в разделе «Global Variables».
Аналогично конфигурируем 2-ой элемент «Прямоугольник» для сигнала положения РО, введя в соответствующие поля «%3.2f» и имя переменной (MV) с точкой перед ним. Для 3-го и 4-го элемента «Прямоугольник» в категории «Текст» в поле «Строка» вводим поясняющие подписи: «Температура» и «Положение РО».
6. Конфигурируем категорию «Тренд», открыв ее двойным щелчком ЛК. Для настройки оси абсцисс нажимаем кнопку «Горизонтальная ось» (рис. 7). В появившемся окне (рис. 8) вводим значения:
- в панели «Шкала»: длительность - 20 m, основные деления – 5 m, дополнительные деления – 1 m; дискретность - 1 s;
- в панели «Подписи»: шаг - 5 m, ставим галочку «время, формат»;
- в панели «Деления шкалы»: ставим галочку «видны», шкала - 20 m.
|
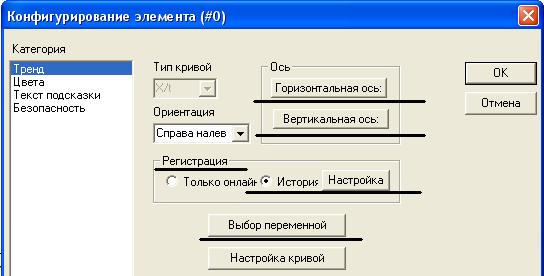
Рис. 7. Конфигурирование графика.
Для настройки оси ординат нажимаем кнопку «Вертикальная ось». В появившемся окне (рис. 8) вводим данные:
- в панели «Деления шкалы» ставим галочку «видны», шаг – 10;
- в панели «Шкала»: тип - левая, начало - 0, конец - 100, основные деления - 10, дополнительные - 5; в панели «Подписи»: шаг – 10.
Для записи данных в файл в окне конфигурирования категории «Тренд» выбираем панель «Регистрация», вариант «История», нажимаем кнопку «Настройка». В появившемся окне (рис.9) вводим в поле «Директория» путь к своей папке, в поле «Имя файла» - имя файла без расширения (расширение «trd» присваивается автоматически).
В окне «Конфигурирование элемента» щелкаем ЛК по кнопке «Выбор переменной». В появившемся окне устанавливаем курсор в первой строке в графе «Переменная», вызываем «Ассистент ввода» клавишей F2, выбираем переменную из списка.
Чтобы отобразить ещё одну переменную на графике, щелкаем в окне «Переменные» по кнопке «Добавить». Цвет линии на графике можно изменить, дважды щелкнув на прямоугольнике в графе «Цвет», на экране появится меню выбора цвета.
|
|
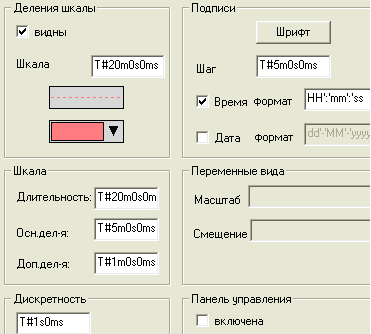
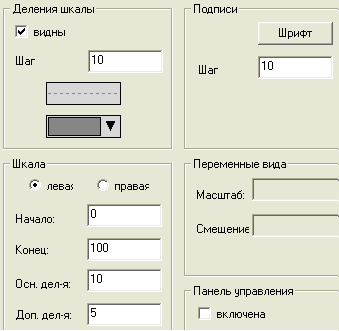
Рис. 8. Конфигурирование горизонтальной и вертикальной осей графика.
|
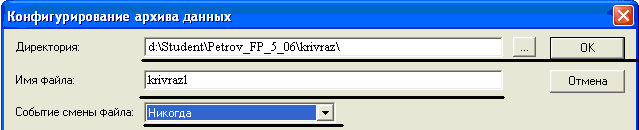
Рис. 9. Конфигурирование архива данных.
7. Загрузка и пуск программы. Загружать программу в контроллер можно, если она скомпилирована, а между контроллером и компьютером установлена связь. В меню «Проект» запускаем «Компилировать». Если в программе нет ошибок, в нижнем окне появится сообщение «0 ошибок, Х предупреждений». Предупреждения игнорируем, ошибки устраняем. Для установки связи входим в меню «Онлайн», запускаем «Подключение». После загрузки запускаем программу: меню «Онлайн», пункт «Старт».
8. Для наблюдения за работой системы во вкладке «Визуализация» открываем созданное окно. На тренде должны отображаться две линии: температура нагревателя и положение регулирующего органа.
Задание 3. Экспериментальное получение кривой разгона объекта.
1. Дожидаемся стационарного начального состояния; записываем значения параметров: для регулируемой переменной PV_0 (температуры нагревателя) и для манипулируемой переменной MV_0 (положения РО).
2. Для
получения кривой разгона требуется
создать ступенчатое возмущение на входе
объекта. Это делается с помощью ИМ в
режиме «Руч» путем включения ИМ на
заданный интервал времени тумблером
«М-0-Б». Перемещение ИМ должно быть
непрерывным, время включения рассчитывается
по скорости перемещения ИМ. Для
используемого стенда скорость ИМ
составляет примерно
![]() %/c.
%/c.
В
данном опыте для создания возмущения
включаем ИМ в направлении «Больше» на
время τвкл=![]() с. Размер созданного возмущения ∆µ
= MV
- MV_0
(изменение положения РО) уточняем по
указателю положения РО в окне визуализации,
размерность - %УП.
с. Размер созданного возмущения ∆µ
= MV
- MV_0
(изменение положения РО) уточняем по
указателю положения РО в окне визуализации,
размерность - %УП.
3. Наблюдаем за записью кривой разгона объекта до стабилизации температуры нагревателя (примерно 20 мин).
4. По достижении стационарного состояния записываем его параметры.
5. По окончании регистрации кривой разгона возвращаем ИМ в исходное состояние, включив его в обратном направлении на то же время. Напряжение на выходе ЛАТРа должно возвратиться к значению 100 В.
6. Дожидаемся стабилизации выхода объекта управления.
Задание 4. Получение реакции объекта на импульсное воздействие.
1. Опыт производим из стационарного состояния объекта, его параметры следует записать (температуру нагревателя и положение ИМ).
2.
Создаем импульсное воздействие на
объект, включив ИМ в направлении «Больше»
на время τвкл=![]() секунд за одно непрерывное включение.
Для получения достаточного отклонения
выхода объекта делаем выдержку времени
τимр
=
40 с; это время используем для определения
размера нанесенного возмущения ∆µ
по указателю положения РО в окне
визуализации, размерность - %УП.
секунд за одно непрерывное включение.
Для получения достаточного отклонения
выхода объекта делаем выдержку времени
τимр
=
40 с; это время используем для определения
размера нанесенного возмущения ∆µ
по указателю положения РО в окне
визуализации, размерность - %УП.
По
истечении выдержки времени τимп
возвращаем
ИМ в исходное состояние, включив его в
обратном направлении на то же время;
положение ИМ должно соответствовать
исходному с точностью до
![]() %;
напряжение на выходе ЛАТРа должно
возвратиться к 100 В; при необходимости
корректируем положение ИМ.
%;
напряжение на выходе ЛАТРа должно
возвратиться к 100 В; при необходимости
корректируем положение ИМ.
3. Наблюдаем за записью реакции объекта на импульсное воздействие до стабилизации температуры нагревателя (около 20 мин).
4. По окончании регистрации останавливаем программу (меню «Онлайн», пункт «Стоп») и разрываем связь между контроллером и компьютером (меню «Онлайн», пункт «Отключение»).
Задание 5. Обработка данных в Excell и MathCad, получение аппроксимирующих выражений для модели объекта.
Запускаем Excel, открываем файл с данными (вида xxx.trd). Указываем формат данных: «С разделителями», символ разделителя - {;}, формат данных в столбцах - «Общий». Получаем файл, содержащий несколько столбцов данных. Данные переменной PV (температуры) находятся справа от столбца с именем этой переменной, заданной при создании графика, а данные переменной MV (положения РО) - справа от столбца с ее именем. Значения записаны с шагом по времени ∆τ =1 с.
2. Для дальнейшей работы данные из указанных столбцов, начиная с момента нанесения возмущения, копируем по отдельности в программу «Блокнот» и сохраняем в файлах вида «PV_xx.txt», «MV_xx.txt».
3. Открываем MathCad, создаем файл для обработки данных, считываем их из текстовых файлов, записываем в массивы c помощью функции READPRN(“…”). В кавычках указывается полный путь к файлу. Пример: чтение данных из файла «PV_1.txt» и загрузка их в массив «PV»:
![]() .
.
4. Определяем приращения переменных у=PV–PV_0 и µ=MV–MV_0 и строим графики кривой разгона и положения РО в виде зависимости этих приращений от времени (рис. 10). Для удобства смещаем начало процессов к моменту нанесения возмущения, а диапазон по времени ограничиваем, когда кривая разгона достигнет 2/3 полного изменения.
|
|
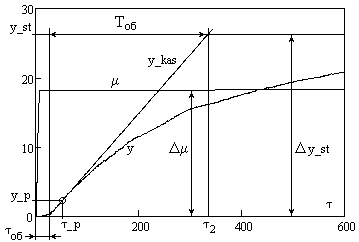
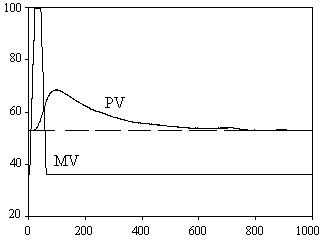
Рис. 10. Кривая разгона объекта и реакция объекта на импульсное воздействие.
5. Проводим горизонтальную линию для конечного статического состояния y_st. Определяем точку перегиба кривой разгона (где скорость изменения максимальна) и строим касательную в этой точке. Координаты точки перегиба {τ_p; y_p} находим визуально с помощью функции trace. Для этого щелкаем правой кнопкой мыши на графике, в открывшемся меню отмечаем функцию trace. Наводим курсор на нужную точку и щелкаем ЛК. В окнах X-Value и Y-Value появятся координаты точки.
Для построения касательной записываем уравнение прямой, проходящей через две заданные точки:
![]() .
.
Для первой точки задаем координаты точки перегиба {τ_p; y_p}. Для второй точки {τ2; y2} координату y задаем на уровне установившегося значения, т.е. y2 = y_st, а координату по времени τ2 определяем методом подбора, так чтобы полученная прямая касалась кривой разгона.
6. По кривой разгона (рис. 10) определяем параметры модели объекта: постоянную времени Tоб, запаздывание τоб, коэффициент передачи Kоб,
где Kоб = ∆yst/∆μ ;
∆yst – установившееся изменение температуры, °C; ∆μ – входное воздействие (изменение положения регулирующего органа), %УП.
7. Находим экспериментальную переходную характеристику объекта hоб(t) путем приведения данных кривой разгона к единице воздействия:
hоб(t) = y(t) / ∆μ.
Составляем выражение в пакете MathCad для аналитической переходной характеристики модели объекта, например:
![]() .
.
9. Строим на одном рисунке графики экспериментальной и аппроксимирующей переходных характеристик объекта.
10. Строим на одном рисунке графики реакции объекта на входное импульсное воздействие и собственно входного воздействия (см. рис. 10).
11. Анализируем графики, делаем выводы.