

38.Устройство и работа ббкп дц «Сетунь».
Базовый блок контролируемого пункта ББКП – это промышленный микроконтроллер, аппаратно и программно ориентированный на выполнение функций системы ДЦ «Сетунь» на ЛП диспетчерского участка. Конструктивно ББКП представляет собой герметизированный блок с габаритными размерами 490×431×263 мм и массой не более 10 кг.
С труктурная
схема ББКП:
труктурная
схема ББКП:
Входящий в состав ББКП микроконтроллер представляет собой монтажный каркас с размещенной в нем объединительной платой с шиной ISA, в котором возможно установить до 8 – ми печатных плат размером 114×124 мм. Для поддержки микроконтроллером функций КП в его состав входят:
- процессорный модуль с загруженной флеш памятью рабочей станции (М1);
- модуль расширителя коммуникационных портов (М2);
- модули модемов со скоростью =2400/1200 (А1, А2);
- блок питания на входное напряжение постоянного тока 18 – 38В (М3);
- модуль преобразования сигналов стыка (М4);
МСО – модуль связи с объектами;
РК –шина;
ПК – провод;
АСР – адаптер стыка расширения.
Обмен инф-ей между ЦП и ЛП осуществляется по групповому каналу ТЧ через РС «Связь» на ЦП модема на ЛП. Каждая инф-ия посылка в линейном тракте защищена циклическим кодом, при этом каждый ЛП передает не свои команды ТУ от ЦП на след. станции и сигнал ТС от соседних станций на ЦП. Если команда ТУ адресована на каждую станцию, то ББКП посылает на ЦП квитанцию о приеме команды и активизирует процессору реализации команд ТУ. После реализации команды ББКП посылает квитанцию на ЦП о выполнении команды.
Модем А, через стык А соединяется с соседними станциями, модем В – с ЦП, а через стык С соединение с объектами, такими как СПОК, КТСМ, ТКС.
Изделие устанавливается в помещениях с температурой от +1 до +40 С и относительной влажности не более 80%. ББКП могут быть размещены на релейных стативах ЭЦ на станциях, где это предусмотрено проектом.
Включение источника питания ББКП осуществляется выключателем «вкл». При этом должны включиться светодиоды. Через 20 – 30 сек после подачи питания, ББКП начинает непрерывно осуществлять сканирование и ввод сигналов ТС, что проявляется в индикации типа «бегущий огонь» на светодиодах оптомодулей. После выполнения команды светодиоды выключаются.
39.Местный способ управления технологическими объектами. Структурная схема. Достоинства и недостатки.
1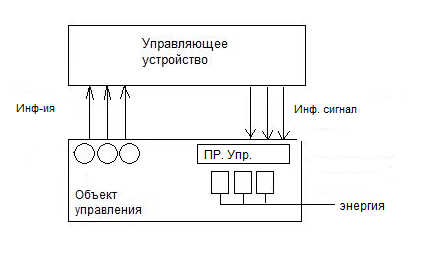 .
Местный (преобразования осуществляются
только в пункте управления и в результате
выработанных команд управляющий сигнал
(энергия) передается к ОУ по индивидуальным
проводам, необходимый для всех
исполнительных механизмов). Такой
способ взаимодействия с объектом
является основным в системах ЭЦ с
центральным питанием.
.
Местный (преобразования осуществляются
только в пункте управления и в результате
выработанных команд управляющий сигнал
(энергия) передается к ОУ по индивидуальным
проводам, необходимый для всех
исполнительных механизмов). Такой
способ взаимодействия с объектом
является основным в системах ЭЦ с
центральным питанием.
Н едостатки:
едостатки:
-небольшая дальность управления;
-большой расход кабеля с различным поперечным сечением проводов (в зависимости от передаваемой мощности).