

Анализ диагностических моделей Введение
Повышение уровня эксплуатации судового оборудования может быть достигнуто созданием систем диагностирования, включающих в себя объект диагностирования (ОД), средства диагностирования и человека оператора (ЧО). Наибольший эффект при диагностировании ОД будет достигаться только при согласованности принимаемых решений в процессе проектирования отдельных элементов системы диагностирования. Чтобы ОД был приспособлен к диагностированию, необходимо при его проектировании разработать диагностическое обеспечение, включающее перечень оцениваемых диагностических признаков, методы их оценки, алгоритмы и средства диагностирования. На основе полученного оценивается комплексно эффективность спроектированной системы диагностирования с учетом принятой степени автоматизации процесса диагностирования.
Разработка диагностического обеспечения обычно начинается на втором этапе проектирования системы диагностирования судового электрооборудования и автоматики и предполагает анализ ОД с учетом возможности изменения его состояния за время эксплуатации. При этом формальное описание ОД, учитывающее возможность изменения его состояния со временем, принято называть диагностической моделью (ДМ). Все многообразие ДМ судового электрооборудования и автоматики сводится в три группы: непрерывные, дискретные и специальные.
Данные методические указания содержат основные положения и порядок выполнения двух работ по анализу специальных диагностических моделей объектов диагностирования.
Лабораторная работа №5
Исследование влияния дефектов
на работоспособность ГЭУ
Цель работы:
- Знать методы оценки влияния дефектов на работоспособность ГЭУ.
Введение
Разработка диагностического обеспечения современных гребных электрических установок и их применение требуют привлечения современных ЭВМ. В случае проектирования это позволяет исключить ряд субъектных ошибок npи решении разнообразных проектных задач. При эксплуатации наличие в системе диагностирования ЭВМ сокращает время, затрачиваемое на контроль технического состояния, поиск возникающих дефектов и прогнозирование изменения состояния гребных электрических установок.
Выполняемая лабораторная работа ориентирована на пакет программ системы автоматического проектирования (САПР) ORCAD.
4.1. Содержание работы:
– ознакомление с необходимыми общими сведениями;
– составление условий работоспособности ГЭУ и их преобразование в терминах пакета программы Orcad;
– загрузка программы и исходной диагностической модели ГЭУ;
– имитация отказов элементов ГЭУ в зависимости от варианта задания;
– снятие характеристик и обработка полученной информации;
– составление отчета.
5.2. Общие сведения
1. Описание ГЭУ. Гребная электрическая установка (система электродвижения) представляет собой комплекс, состоящий из сочетания первичных двигателей, генераторов, преобразователей, гребных электродвигателей, движителей, аппаратуры управления, регулирования, защиты и блокировки, предназначенный для движения судов.
Гребные электрические установки (ГЭУ) могут работать в двух режимах:
– режим стабилизации частоты вращения гребного винта (ГВ) (ход судна в свободной воде);
– режим постоянства мощности ГЭУ (ход судна в тяжелых условиях плавания).
В этой лабораторной работе рассматривается режим стабилизации частоты вращения гребного винта. Это означает, что характер и диапазон возможного изменения частоты вращения гребного вала рассматривается в режиме хода судна в свободной воде. По Правилам Регистра РФ для ходовых режимов предельное изменение скорости вращения гребного вала находится в пределах на 20-25% ниже и на 15% выше от номинального значения. В таких режимах время перехода силовой установки от одной скорости к другой измеряется минутами. В условиях резкого маневрирования это время измеряется секундами.
Структурная схема для исследования влияния дефектов на работоспособность гребной электрической установки представлена на рисунке 5.1, а ее диагностическая модель на основе программы Orcad на рисунке 5.2.

Рисунок 5.1
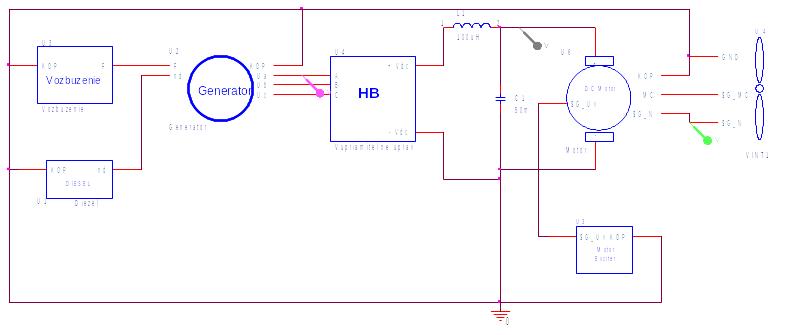
Рисунок 5.2
Диагностическая модель, приведенная на рисунке 5.2, позволяет исследовать работоспособность и влияние дефектов на степень работоспособности ГЭУ.
Для иллюстрации подхода к использованию системы САПР Orcad при исследовании рассматриваются дефекты:
– приводящие к выходу напряжения за допустимые пределы (вверх – вниз);
– типа короткое замыкание (кз) в цепи диодов НУВ;
– типа обрыв в цепи диодов НУВ;
– витковое замыкание обмоток возбуждения.
2. Работоспособное состояние ГЭУ. Под работоспособностью ГЭУ понимается такое ее состояние, при котором она способна выполнять заданные функции, сохраняя значения заданных параметров в пределах, установленных нормативно-технической документацией. В качестве диагностического признака, позволяющего оценивать изменение состояния ГЭУ в целом, взята частота вращения N гребного винта (ГВ), определяющая скорость хода судна.
Для исследования изменения состояния ГЭУ необходимо определить границы на значения N, характеризующие область работоспособности ГЭУ. В работоспособном состоянии ГЭУ принимаются значения частоты вращения N на валу гребного винта в диапазоне [Nнг ; Nвг]об./мин, где Nнг – нижняя граница, а Nвг - верхняя граница частоты вращения. В номинальном режиме N = Nн. Номинальный режим вращения гребного винта в рассматриваемом случае осуществляется при напряжении неуправляемого выпрямителя U = Uн, токе в цепи якоря гребного двигателя I = Iн, ЭДС = Eн. При этом отсутствуют какие-либо дефекты в других элементах ГЭУ.
Условие работоспособности ГЭУ можно записать в виде Nнг ≤ N ≤ Nвг.
Характеристики частоты вращения N вала гребного винта, напряжения на выходе неуправляемого выпрямителя (НУВ), тока и ЭДС в цепи якоря гребного электродвигателя (ГЭД) в работоспособном состоянии представлены на рис. 3, а, 3, б и 3, в соответственно.
а)
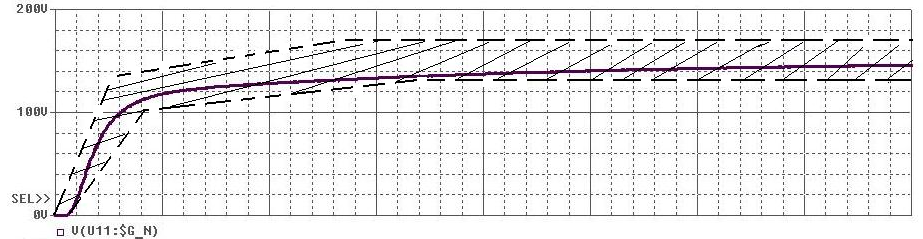
б)

в)
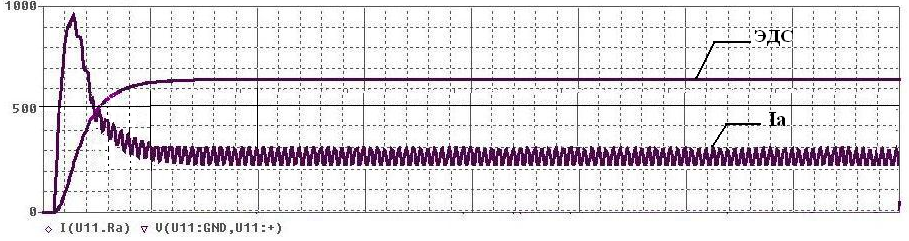
Рисунок 5.3.
3. Виды дефектов в гребных электрических установках.
1) Дизель-генератор:
+ Дизель:
- дефекты, проводящие к выходу частоты вращения вала дизеля за допустимые пределы (вверх – вниз);
+ Синхронный генератор:
- проводящие к выходу напряжения за допустимые пределы (вверх – вниз);
- обрыв одной из фаз генератора;
- обрыв двух из трех фаз генератора.
+ Обмотка возбуждения СГ:
- витковые замыкания обмотки возбуждения;
- отказы, приводящие к выходу за допустимые пределы напряжения СГ за счет изменения напряжения возбуждения.
2) Статический преобразователь:
+ Одноканальные дефекты:
- элементные короткие замыкания тиристоров или транзисторов;
- элементные обрывы тиристоров или транзисторов.
+ Двухканальные дефекты:
- короткие замыкания тиристоров или транзисторов и КЗ между каналами;
- обрывы тиристоров или транзисторов и обрыв между каналами.
3) Исполнительное устройство:
+ ГЭД:
- витковые замыкания обмотки якоря;
+ Обмотка возбуждения ГЭД:
- витковые замыкания обмотки возбуждения ГЭД;
- обрыв обмотки возбуждения ГЭД.
+ Гребной винт:
- дефекты, приводящие к внезапному увеличению момента сопротивления (винт заклинивает во льдах);
- дефекты, приводящие к внезапному уменьшению момента сопротивления (винт теряет лопасти).