

56) Регулирование частоты вращения асинхронного двигателя
Во многих случаях трехфазные асинхронные двигатели применяются для приводов, не требующих регулирования частоты вращения. Но асинхронные двигатели обладают ценными преимуществами: надежностью, дешевизной, простотой конструкции, высоким КПД и относительно малой массой. По этим причинам естественно стремление применять их и для приводов с регулируемой частотой вращения.
Для регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором обычно используются метод частотного регулирования, представляющий собой плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотках статора, и метод изменения числа пар полюсов вращающегося магнитного поля, при котором частота вращения магнитного поля изменяется скачком.
Для регулирования частоты вращения асинхронных двигателей с фазным ротором используется метод реостатного регулирования, представляющий собой плавное регулирование скольжения ротора путем изменения активного сопротивления его фазных обмоток.
Частотное
регулирование.Наиболее перспективным
методом управления частотой вращения
асинхронного двигателя являетсярегулирование частоты переменного
тока статора двигателя. Угловая
скорость вращающегося поля![]() .
Следовательно, при изменении
частоты токаf
пропорционально изменяется угловая
скорость поля. Однако при осуществлении
регулирования частоты тока нужно учесть,
что необходимо одновременное регулирование
напряжения. ЭДС фазы, а следовательно,
и питающее напряжение пропорциональны
частоте тока и потоку. Так как поток
должен сохраняться во всех режимах
одним и тем же, то напряжение должно
быть (без. учета падений напряжения
в машине) пропорциональным частоте.
Кроме того, это нужно для того, чтобы
при изменении частоты вращения двигателя
не изменялся его вращающий момент.
.
Следовательно, при изменении
частоты токаf
пропорционально изменяется угловая
скорость поля. Однако при осуществлении
регулирования частоты тока нужно учесть,
что необходимо одновременное регулирование
напряжения. ЭДС фазы, а следовательно,
и питающее напряжение пропорциональны
частоте тока и потоку. Так как поток
должен сохраняться во всех режимах
одним и тем же, то напряжение должно
быть (без. учета падений напряжения
в машине) пропорциональным частоте.
Кроме того, это нужно для того, чтобы
при изменении частоты вращения двигателя
не изменялся его вращающий момент.
Чтобы оценить
характер зависимости вращающего момента
от частоты тока в обмотках статора и от
напряжения на нем, пренебрежем в уравнении
 активным сопротивлением обмотки
статора
активным сопротивлением обмотки
статора![]() и индуктивными сопротивлениями
рассеяния обмоток статора
и индуктивными сопротивлениями
рассеяния обмоток статора![]() и ротора
и ротора![]() и воспользуемся выражением для частоты
скольжения (
и воспользуемся выражением для частоты
скольжения (![]() ):
):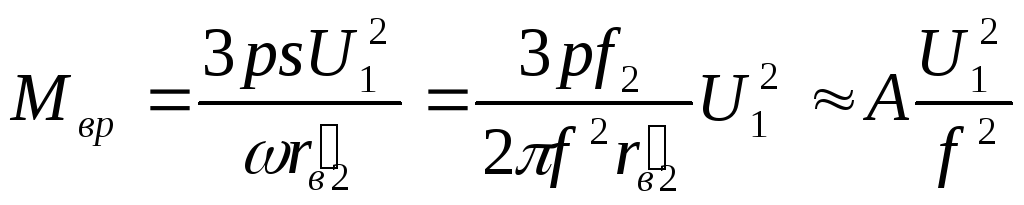
где А =const.
Следовательно,
при изменении частоты тока для поддержания
вращающего момента постоянным необходимо
пропорционально изменять напряжение
на статоре; иными словами, условием
поддержания постоянства вращающего
момента двигателя при регулировании
частоты будет
![]() .
Если регулировать частоту тока и
напряжение, соблюдая указанное условие,
то механические характеристики двигателя
будут оставаться жесткими, а максимальный
момент почти независимым от частоты
(он существенно уменьшается лишь при
относительно низких частотах). В то же
время мощность будет изменяться
пропорционально частоте тока, так как
.
Если регулировать частоту тока и
напряжение, соблюдая указанное условие,
то механические характеристики двигателя
будут оставаться жесткими, а максимальный
момент почти независимым от частоты
(он существенно уменьшается лишь при
относительно низких частотах). В то же
время мощность будет изменяться
пропорционально частоте тока, так как![]() .
Например, при уменьшении частоты тока
в 2 раза вдвое уменьшается и мощность
двигателя на валу.
.
Например, при уменьшении частоты тока
в 2 раза вдвое уменьшается и мощность
двигателя на валу.
Регулирование изменением числа пар полюсов. Ступенчатое изменение угловой скорости асинхронного двигателя в широких пределах осуществимо ценой усложнения и удорожания конструкции асинхронного двигателя — это регулирование переключением числа пар полюсов двигателя.
При постоянной
частоте сети угловая скорость вращающегося
поля зависит только от числа пар полюсов
этого поля, определяемого обмоткой
статора. Если на статоре поместить две
отдельные обмотки — одну, образующую
р пар, а другую, образующуюр' пар
полюсов, то, включив в сеть первую или
вторую обмотку, мы получим частоту
вращения поля:![]() или
или![]()
следовательно,
![]() ,
соответственным образом будут различаться
и частоты вращения ротора двигателя.
При этом обмотка ротора двигателя должна
быть выполнена, как беличье колесо.
,
соответственным образом будут различаться
и частоты вращения ротора двигателя.
При этом обмотка ротора двигателя должна
быть выполнена, как беличье колесо.
Числа полюсов обмоток статора в этом случае взаимно ничем не связаны и могут быть выбраны любыми в зависимости от условий работы двигателя. Само регулирование сводится к скачкообразному изменению частоты вращения поля двигателя. Но частота вращения ротора не может изменяться скачкообразно из-за инерции всей системы электропривода. Лишь после переключения начинается соответствующее изменение частоты вращения ротора.
Ч тобы
показать нагляднее этот переходный
процесс, построим две механические
характеристики асинхронной машины с
изменяемым числом пар полюсов: одну
характеристику, соответствующуюр
парам полюсов, а вторуюр' =2р
парам полюсов (соответственно рис.
14.31,а и б). Предположим, что момент
на валу двигателя остается постоянным
при изменении частоты вращения поля.
При увеличении последней, т. е. при
переходе отр' кр парами полюсов,
двигатель сначала оказывается в
условиях, близких к пусковым, и имеет
место скачок тока.
тобы
показать нагляднее этот переходный
процесс, построим две механические
характеристики асинхронной машины с
изменяемым числом пар полюсов: одну
характеристику, соответствующуюр
парам полюсов, а вторуюр' =2р
парам полюсов (соответственно рис.
14.31,а и б). Предположим, что момент
на валу двигателя остается постоянным
при изменении частоты вращения поля.
При увеличении последней, т. е. при
переходе отр' кр парами полюсов,
двигатель сначала оказывается в
условиях, близких к пусковым, и имеет
место скачок тока.
Но при переходе от р кр', т. е. при уменьшении частоты вращения поля, машина оказывается сначала в условиях генераторного режима и работает, отдавая
энергию в сеть. Такой режим иногда используется для быстрого и экономичного торможения электропривода.
Двумя отдельными обмотками снабжаются статоры лишь у двигателей небольшой мощности; у двигателей большой мощности более целесообразным является переключение катушек одной и той же обмотки для получения различного числа пар полюсов.
Н а
рис. 14.32 показана схема переключения
трехфазной обмотки с двух на четыре
полюса. Переключение обмотки в ином
отношении, чем 1 : 2, требует более сложного
изменения схемы и применяется реже.
а
рис. 14.32 показана схема переключения
трехфазной обмотки с двух на четыре
полюса. Переключение обмотки в ином
отношении, чем 1 : 2, требует более сложного
изменения схемы и применяется реже.
В большинстве случаев статор асинхронной машины снабжается двумя независимыми обмотками, из которых каждая переключается в отношении 1 : 2 или ином. Таким образом, двигатель имеет четыре ступени частоты вращения, например 3000; 1500, 1000 и 500 об/мин.
Реостатное
регулирование. В трехфазных
асинхронных двигателях с фазным
ротором используется реостатный способ
регулирования частоты вращения ротора.
Это достигается введением в цепь фазных
обмоток ротора регулируемого трехфазного
реостата, как при пуске двигателя (рис.
14.24). Но этот реостат должен быть рассчитан
на длительную нагрузку током ротора, а
не на кратковременную, как пусковой
реостат. Увеличение активного сопротивления
цепи ротора изменяет характеристикуМ
(s) — делает ее
более мягкой (см. рис. 14.25). Если при
постоянном моменте на валу двигателя
увеличивать активное сопротивление
цепи ротора путем постепенного увеличения
сопротивления реостата(![]() ),
то рабочая точка будет смещаться с одной
кривойМ (s) на
следующую, соответствующую возросшему
сопротивлению цепи ротора (рис. 14.25,
точки1—4), соответственно чему
будет расти скольжение, а следовательно,
уменьшаться частота вращения двигателя.
Этим путем возможно изменять частоту
вращения ротора в пределах от номинальной
до полной остановки. Но при таком способе
регулирования неизбежны относительно
большие потери энергии. Мощность
вращающегося поля РВРП без учета
потерь энергии в сердечнике статора
состоит из мощности потерь в проводниках
обмотки ротора :
),
то рабочая точка будет смещаться с одной
кривойМ (s) на
следующую, соответствующую возросшему
сопротивлению цепи ротора (рис. 14.25,
точки1—4), соответственно чему
будет расти скольжение, а следовательно,
уменьшаться частота вращения двигателя.
Этим путем возможно изменять частоту
вращения ротора в пределах от номинальной
до полной остановки. Но при таком способе
регулирования неизбежны относительно
большие потери энергии. Мощность
вращающегося поля РВРП без учета
потерь энергии в сердечнике статора
состоит из мощности потерь в проводниках
обмотки ротора :![]() и механической мощности
и механической мощности![]()
Отношение
![]() показывает, что доля механической
мощности уменьшается прямо пропорционально
уменьшению частоты вращения ротора, в
то же время соответственно увеличивается
доля мощности потерь в активном
сопротивлении цепи ротора. Следовательно,
для уменьшения частоты вращения
двигателя, например, на 25% нужно
включить в цепь ротора реостат с таким
активным сопротивлением, в котором
будет бесполезно превращаться в теплоту
четверть энергии вращающегося магнитного
поля. Недостатком такого регулирования
может являться и то обстоятельство, что
включение реостата в цепь ротора делает
механическую характеристику двигателя
мягче, следовательно, уменьшает
стабильность его частоты вращения. При
включенном реостате малые изменения
нагрузки на валу вызывают значительные
изменения частоты вращения двигателя.
показывает, что доля механической
мощности уменьшается прямо пропорционально
уменьшению частоты вращения ротора, в
то же время соответственно увеличивается
доля мощности потерь в активном
сопротивлении цепи ротора. Следовательно,
для уменьшения частоты вращения
двигателя, например, на 25% нужно
включить в цепь ротора реостат с таким
активным сопротивлением, в котором
будет бесполезно превращаться в теплоту
четверть энергии вращающегося магнитного
поля. Недостатком такого регулирования
может являться и то обстоятельство, что
включение реостата в цепь ротора делает
механическую характеристику двигателя
мягче, следовательно, уменьшает
стабильность его частоты вращения. При
включенном реостате малые изменения
нагрузки на валу вызывают значительные
изменения частоты вращения двигателя.