

И технологии fti:

разбивает ее на слои и рассчитывает путь перемещения платформы, на кото-
рой формируется прототип. Толщина слоя составляет 0,08-0,1 мм и является фиксированной величиной.
Особенности технологии FTI:
●наличие поддерживающих структур;
●прототип формируют в верхней части установки, а не в нижней части как это предусмотрено при реализации стереолитографии. Поддержки генерируются автоматически для нависающих элементов модели. На завершающем этапе обработки прототипа поддержки удаляются.
Вопросы для самостоятельное работы
Какое оборудование производит машиностроение для обеспечения технологий обезвреживания и рециклинга использованных промышленных изделий, сточных вод, выбросов в атмосферу, загрязненных почв.
Каким требованиям должно отвечать оборудование для современных мусоросортировочных предприятий и мусоросжигающих заводов.
3.Какую роль сыграло машиностроение для создания промышленного производства аммиака.
4. Как способы получения моделей методами стереолитографии способствуют повышению уровня техносферной безопасности.
Глава 11. Автоматизация технологических процессов
Методологической основой исследований и разработки инженерных решений задач ресурсосбережения является системный подход, включающий технологии эффективной переработки ресурсов, обеспечения безопасности на основе автоматизации как важнейшего современного инструмента модернизации производств.
Автоматизация – совокупность методов и средств, позволяющих частично или полностью освободить человека от участия в технологическом процессе.
Степень автоматизации = необходимая доля участия оператора в управлении процессом.
Безлюдный режим – степень автоматизации, при которой технологические процессы, осуществляемые на соответствующем оборудовании участка, цеха или всего предприятия могут работать автоматически в течение, по крайней мере, одной производственной смены (8 часов) в отсутствии человека.
Преимущества автоматизации:
●Высокое быстродействие (человеку свойственна инерционность).
●Возможность минимизации работы специалиста в тяжелых и вредных условиях.
●Высокая производительность труда.
●Экономное использование материалов.
●Стабильное и достаточно высокое качество продукции.
11.1. Основные принципы управления
Управление как процесс целенаправленного воздействия на объект (рис.11.1), включает следующие основные структурные компоненты:
Система автоматического управления (САУ) -автоматическая система, которая в течение длительного времени требуемым образом изменяет или поддерживает неизменными координаты движущегося объекта, скорость движения, электрическое напряжение, частоту, температуру, давление, концентрации веществ и пр.) в управляемом процессе (рис.11.1).
Задача управления заключается в формировании и реализации такого закона изменения управляющего воздействия, при котором обеспечивается заданный алгоритм при наличии возмущающих воздействий.
Для решения этой задачи используют три фундаментальных принципа управления:
1)разомкнутое управление,
2)управление по возмущению (принцип компенсации)
3)замкнутое управление (принцип обратной связи или управление по отклонению).
Принцип разомкнутого управления состоит в том, что управление осуществляется только на основе заданного алгоритма функционирования и не контролируется фактическое значению управляемой величины, то есть текущее состояние объекта управления (ОУ) не учитывается при выработке управляющих воздействий.
.
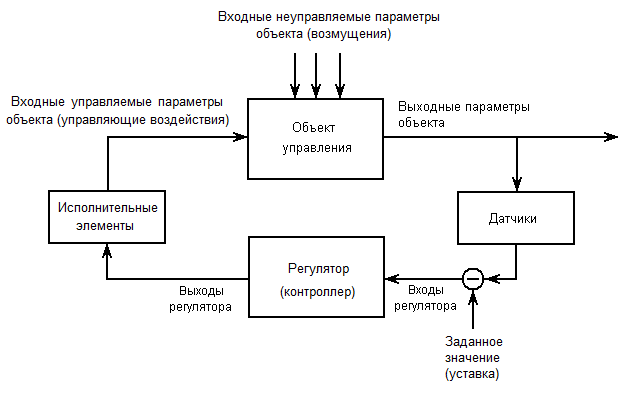
Рис.11.1. Общая структура системы управления технологическим объектом
с обратной связью:1.Объект управления – объект, процесс или система, на который направлено управляющее воздействие.2.Субъект управления – регулятор или контроллер, где происходит сбор информации, ее обработка, принимается решение, формируются управляющие сигналы. 3.Датчики – устройства, преобразующие значения контролируемых параметров (температуры, давления, концентрации веществ и т.д.) объекта управления в электрический сигнал.4.Исполнительные элементы (реле, вентили, заслонки и т.д.) – устройства, осуществляющие непосредственное воздействие на объект управления в соответствии с выходным сигналом регулятора (контроллера).
Объект управления и субъект управления (регулятор или контроллер) связаны между собой прямой (через датчики) и обратной (через исполнительные элементы) связями. Прямая и обратная связи – это основополагающие понятия процесса управления.
На вход регулятора подается только задающее воздействие, которое преобразуется управляющими устройствами в управляющее воздействие
Управляющее воздействие изменяет ОУ так, чтобы выходные параметры объекта были равны заданному значению.
Однако наличие возмущающего воздействия может привести к тому, что действительное значение управляемой величины будет отличатся от заданного, то есть появляется ошибка управления. Накопление ошибок управления может привести к отказу работы системы управления.Поэтому принцип разомкнутого управления неприменим в условиях значительных помех и возмущений. Его в чистом виде применяют редко и только в простых случаях.
Система управления по отклонению управления содержит обратную связь (рис.11.1)и является замкнутой. На входе регулятора элемент сравне-ния определяет разность между действительным и заданным значениями параметров. Эта разность называется рассогласованием. Регулятор работает таким образом, чтобы постоянно сводить рассогласование к нулю.
Обратная связь такого типа называется отрицательной.
Универсальность и эффективность принципа управления по отклонению состоит в том, что он позволяет осуществить заданный закон изменения управляемой величины независимо от того, изменение какого из входных воздействий – задающего или возмущающего – вызвало возникновение рассогласования. Системы автоматического управления (САУ) по отклонению реагирует на интегрированное внешнее воздействие, проявляющееся в изменении контролируемой (измеряемой) управляемой величины.
Достоинства САУ по отклонению - простота технической реализации и высокая точность управления.
Недостатки систем с обратной связью - недостаточная оперативность, обусловленная тем, что действие системы направлено на ликвидацию рассогласования. То есть САУ сначала допускает изменение управляемой величины под воздействием внешних или внутренних возмущений, а потом его ликвидирует. При управлении по отклонению влияние возмущающих воздействий на выходную величину в значительной мере ослабляется, но не устраняется полностью.
Принцип управления по возмущению (ПУВ) используют, когда изменение состояния объекта управления (ОУ) под действием одного или нескольких определенных возмущений недопустимо. Его реализуют путем преобразования измеренного датчиком возмущения в воздействие, подаваемое на вход регулятора, которое формирует управляющее воздействие с учетом возмущения. ПУВ ориентирован не на следствие, как принцип обратной связи, а на причину, нарушающее равновесие объекта управления,
Достоинства САУ, реализованных по ПУВ - более высокая оперативность по сравнению с системами с обратной связью.
Недостаток САУ, реализованных по ПУВ - при компенсировании влияния одного или нескольких заранее определенных возмущений они не могут предотвратить влияние на управляемую величину других возмущающих воздействий. Ошибка управления возникаtт даже при учете всех возмущений, так как система не может противостоять изменению внутренних свойств регулятора и ОУ.
Комбинированное управление (КУ) улучшает качество управления в условиях действия возмущений. В системах КУ на вход управляющих уст-ройств, помимо рассогласования, вычисляемого по задающему воздейст-вию и сигналу обратной связи, поступает сигнал от измерения возмущающих воздей-ствий. Обычно в комбинированных схемах измеряется только основное возму-щение, а влияние остальных возмущений учитывается по цепи обратной связи.
11.2.-Классификация систем автоматического регулирования
Системы автоматического регулирования (САР), построенные на основе принципа замкнутого управления в зависимости от основной цели управления, классифицируют следующим образом:
●системы стабилизации, поддерживающие постоянным во времени выходной контролируемый параметр объекта на некотором заданном уровне;
●системы программного управления, изменяющие выходной параметр объекта во времени по заранее известному закону;
● следящие системы, изменяющие выходной параметр объекта во времени по заранее неизвестному закону, который определяется каким-то внешним независимым процессом.
В зависимости от характера действия различных элементов, входящих в систему регулирования, различают:
● САР непрерывного действия, которые состоят только из звеньев непрерывного действия, выходная величина которых изменяется при плавном изменении входной величины.
●дискретная САР содержит звено дискретного действия, выходная вели-чина которого меняется дискретно при плавном изменении входной величины.
Дискретные системы в свою очередь, могут быть:● релейными, ●импульсными
●цифровыми.
Бурное развитие микроэлектроники определило широкое распространение цифровых систем управления, обладающих высокой точностью.Согласно поведению параметров системы во времени различают:
● стационарные системы, которые в период эксплуатации не изменяют параметры;
● нестационарные системы, изменяющие в период эксплуатации свои параметры;
Особо выделяют системы с распределенными параметрами, содержа- щие распределенные в пространстве элементы, например, длинные электрические линии и т.д.
По способу математического описания системы регулирования делят на линейные и нелинейные.
По числу контуров прохождения сигналов САР различают:
●одноконтурные САР - САР с одним контуром регулирования; ●многоконтурные САР - САР с несколькими контурами регулирования можно применять и для регулирования одной величины с целью повышения качества переходного процесса.
По числу регулируемых величин различают:
● одномерные САР, в которых регуляторы между собой не имеют непосредственной связи и взаимодействуют только через объект регулирования.
●многомерные САР, в которых регуляторы непосредственно связаны между собой и взаимодействуют также через объект регулирования.
Многомерные САР делят на:
● САР несвязанногорегулирования - регуляторы различных параметров одного и того же объекта имеют непосредственные взаимные связи помимо связей через объект регулирования.
●САР связанного регулирования - регуляторы различных параметров одного и того же объекта не имеют непосредственные взаимные связи помимо связей через объект регулирования.
На практике же оптимизируемая величина объекта часто зависит не от нескольких, а от одной управляющей величины; такие оптимальные системы называют экстремальными системами.