

6.6. Пространственная селекция
Устройства пространственной селекции обеспечивают защиту РЛС от активных помех, воздействующих по боковым лепесткам диаграммы направленности антенны. Для защиты РЛС от синхронных (ответных) импульсных помех применяются так называемые устройства подавления боковых ответов (ПБО), а для подавления непрерывных шумовых помех используется компенсационный метод.
Система ПБО (рис.6.7,a) состоит из дополнительного приемного канала с антенной, диаграмма направленности Fд() которой огибает боковые лепестки диаграммы направленности Fо() основной антенны (рис.6.7,б).
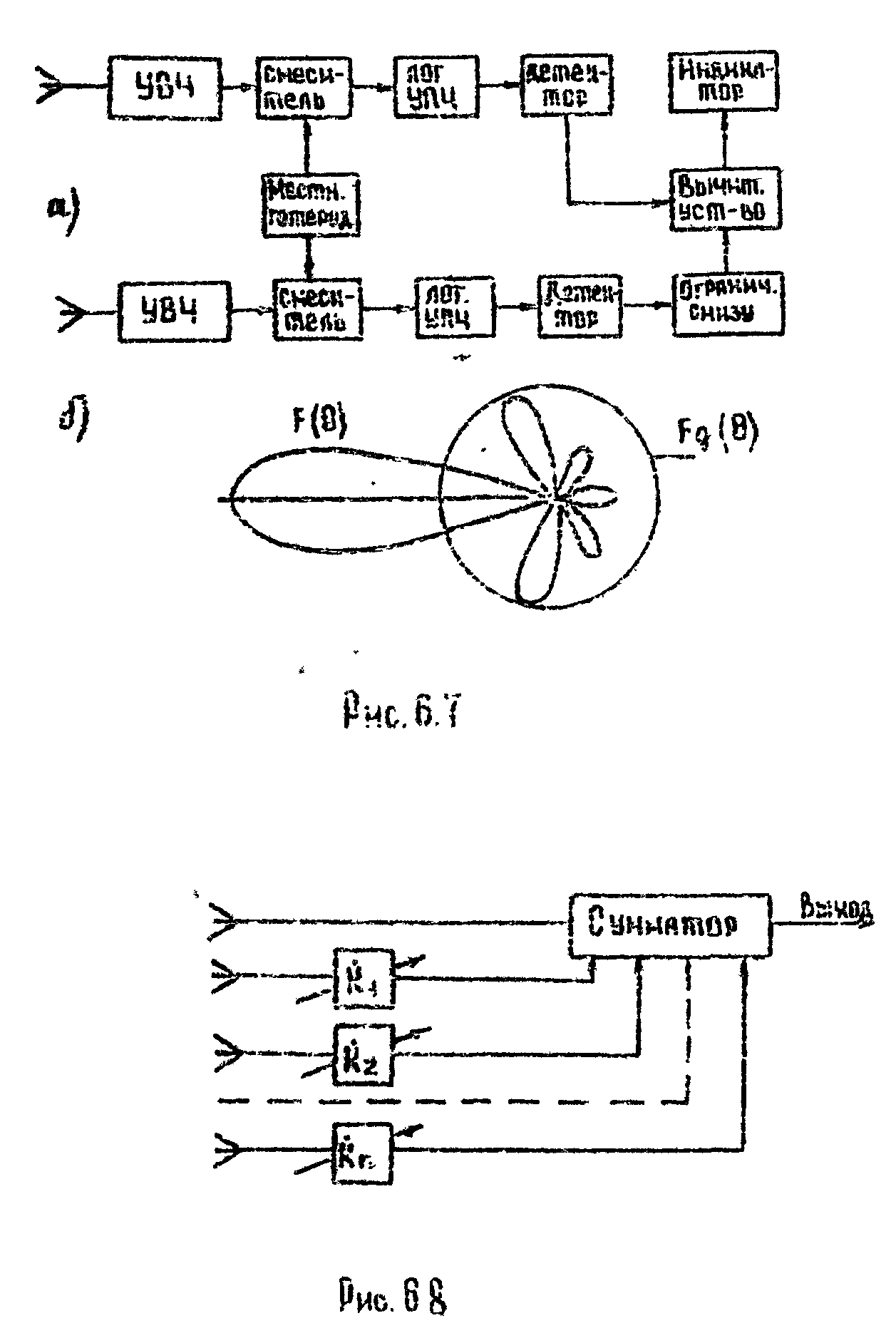
Коэффициенты усиления антенны и приемника дополнительного канала выбираются таким образом, чтобы выполнялось условие :
Uпд > Uпо ,
где Uпд и Uпо - амплитуды помеховых импульсов на выходах дополнительного и основного каналов приема.
Вычитающее устройство отрегулировано так, что на его выход проходят сигналы только в том случае, если величина сигналов основного канала превышает величину сигналов дополнительного канала, поэтому импульсные помехи, принятые по боковым лепесткам основной диаграммы направленности, будут полностью подавлены.
Логарифмические усилители применены для расширения динамического диапазона приемных каналов. Ограничитель снизу предназначен для снижения вероятности подавления слабых полезных сигналов основного канала шумовыми выбросами в дополнительном канале.
Сущность компенсационного метода заключается в следующем (рис. 6.8). Приемная антенная система состоит из основной А0 и дополнительных А1, А2,...,Аn антенн, диаграммы направленности которых перекрывают область боковых лепестков диаграммы направленности основной антенны. В каждом из дополнительных каналов приема включены усилители с регулируемыми комплексными коэффициентами передачи 1, 2,..., n. Напряжения с выходов всех каналов поступают на сумматор.
Результирующая комплексная диаграмма направленности такой антенной системы определяется соотношением:
![]() ,
,
где
![]() - комплексная диаграмма направленности
приемной антенны i-го канала.
- комплексная диаграмма направленности
приемной антенны i-го канала.
Путем подбора комплексных коэффициентов i можно добиться образования провалов в результирующей диаграмме направленности в направлении на ПАП. Для формирования провалов в заданных направлениях j коэффициенты передачи должны удовлетворять следующей системе уравнений:
![]() , j(1,2,...,m),
, j(1,2,...,m),
где m - количество ПАП.
При n m данная система будет иметь по крайней мере одно решение. Это означает, что для компенсации активных шумовых помех число дополнительных каналов должно быть не меньше числа разрешаемых по направлению ПАП.
Процесс управления комплексными коэффициентами i в современных РЛС автоматизирован. В этом случае устройства для подавления активных шумовых помех называются автокомпенсаторами.
6.7. Автокомпенсаторы активных шумовых помех
Автокомпенсатор активных шумовых помех,
воздействующих на РЛС по боковым
лепесткам диаграммы направленности
антенны, представляет собой
самонастраивающееся устройство с
корреляционными обратными связями.
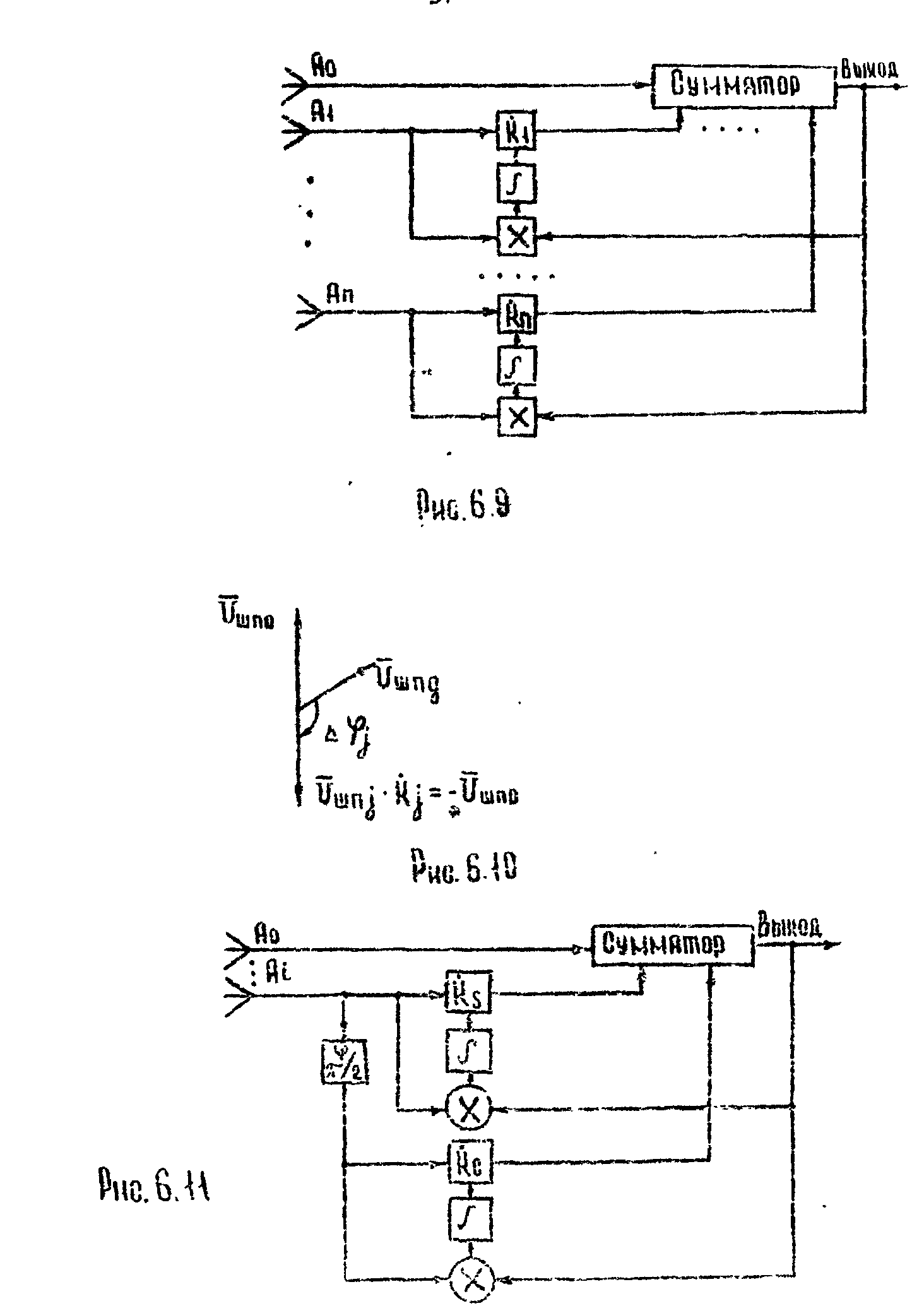
Основу устройства составляет схема
(рис.6.9), в которой управление комплексными
коэффициентами передачи
i
осуществляется напряжениями с выходов
корреляторов; их первые входы подключены
к выходам дополнительных антенн, а
вторые - к выходу автокомпенсатора. В
состав каждого коррелятора входят
перемножитель (Х) и интегратор (![]() .
.
Автокомпенсатор работает следующим образом. В отсутствие активных шумовых помех напряжения на выходах дополнительных каналов равны нулю; соответственно равны нулю выходные напряжения корреляторов и коэффициенты передачи i. При поступлении активной шумовой помехи с j-го направления напряжение этой помехи появляется на выходах как основного, так и j-го дополнительного канала. В результате на выходе j-го коррелятора появляется напряжение, которое управляет модулем и аргументом j-го комплексного коэффициента передачи до тех пор, пока напряжения помехи на выходах основного и j-го дополнительного каналов не станут равными по амплитуде и противоположными по фазе, что приводит к компенсации напряжения помехи в сумматоре. Принцип компенсации помехи поясняется схемой, представленной на рис.6.10.
Аналогично работает автокомпенсатор при воздействии помех одновременно с нескольких направлений, число которых не превышает числа дополнительных каналов.
Технически одновременное управление модулем и аргументом комплексного коэффициента передачи возможно двумя способами - путем формирования двух квадратурных каналов и с помощью управляемого смесителя. В первом случае автокомпенсатор называют квадратурным, а во втором - гетеродинным.