

2.4.4. Способы обзора пространства и измерения координат
в трехкоординатных РЛС
Как указывалось выше, для измерения в процессе обзора трех пространственных координат необходимо применение антенн с узкими диаграммами направленности как по азимуту, так и по углу места. Однако при наличии одного узкого луча недопустимо увеличивается время обзора пространства.
Обеспечить одновременный обзор всех угломестных направлений в заданном секторе в трехкоординатных РЛС можно следующими методами:
методом V-луча;
методом парциальных диаграмм;
методом частотного сканирования луча антенны в угломестной плосксти;
гониометрическим методом.
Рассмотрим кратко сущность этих методов.
1. Метод v-луча
Антенная система РЛС состоит из двух антенн, формирующих верные диаграммы направленности (рис.2.18), поперечное сечение которых может быть аппроксимировано эллипсом, причем большая ось одного эллипса перпендикулярна подстилающей поверхности ("вертикальный луч"), а другого - составляет с ней угол 45 ("наклонный луч"). Поперечное сечение общей диаграммы направленности антенны напоминает букву V, что и дает название методу.
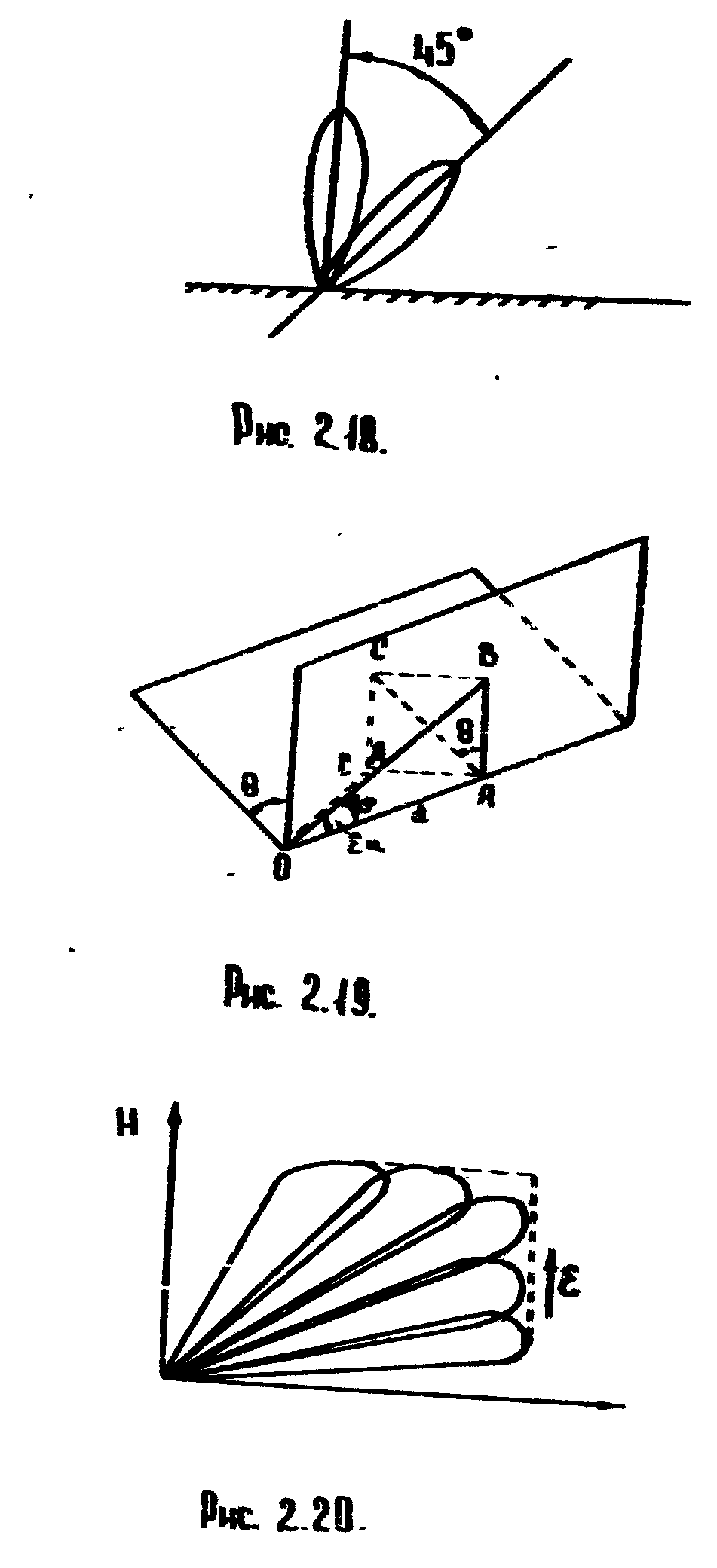
При вращении антенной системы каждая цель облучается дважды - сначала вертикальным, а затем наклонным лучом. Промежуток времени между первым и вторым облучениями зависит от угла места цели.
Чем больше ц, тем на больший угол должна повернуться антенная система, чтобы цель, облученная вертикальным лучом, была облучена вторично наклонным лучом.
Из рис.2.19 видно, что
sinц = АВ/Д .
Проведя несложные преобразования и учитывая, что угол равен 45, получим :
sinц =![]() (2.8)
(2.8)
где
![]() =2-1;
здесь 1, 2
- азимут антенны при первом и втором
облучении цели соответственно.
=2-1;
здесь 1, 2
- азимут антенны при первом и втором
облучении цели соответственно.
При известной дальности до цели ее высота вычисляется после подстановки (2.8) в уравнение высоты.
Достоинством рассмотренного метода является возможность определения трех координат цели при достаточно большой скорости обзора пространства.
К недостаткам метода относятся:
малая точность определения высоты при большой дальности до цели, поскольку в этом случае угол слабо зависит от ц;
влияние тангенциальной составляющей скорости цели на точность определения ее высоты;
сложность распознавания соответствующих пар отметок цели при большом числе целей.
2. Метод парциальных диаграмм
При данном методе одновременный обзор заданного угломестного сектора обеспечивается тем, что антенна РЛС формирует на прием в вертикальной плоскости набор смещенных и перекрывающихся друг с другом узких парциальных диаграмм (рис.2.20). Такая парциальная ДНА может быть сформирована, например:
а) с помощью зеркальной антенны с набором смещенных друг относительно друга по вертикали облучателей. Каждому лепестку соответствует свой приемный канал;
б) за счет частотной "окраски" зоны в угломестной плоскости (при использовании частотно-зависимых антенных систем);
в) за счет использования РЛС с ФАР и диаграммообразующей системы.
На излучение формируется либо один широкий луч косекансной формы, как это реализовано в 55Ж6, 22Ж6, либо набор лучей, перекрывающих заданный угломестный сектор (19Ж6).
Определение угла места цели может производиться:
способом дискретного отсчета по пороговым уровням;
способом сравнения амплитуд сигналов соседних парциальных каналов;
способом сравнения фаз сигналов соседних парциальных каналов;
комбинированным способом.
Способ дискретного отсчета по пороговым уровням состоит в следующем. В каждом парциальном канале производится сравнение амплитуды принятого сигнала с некоторым пороговым уровнем. Уровень порога выбирают таким, чтобы превышение его сигналом более чем в двух парциальных каналах было маловероятным (рис.2.21).
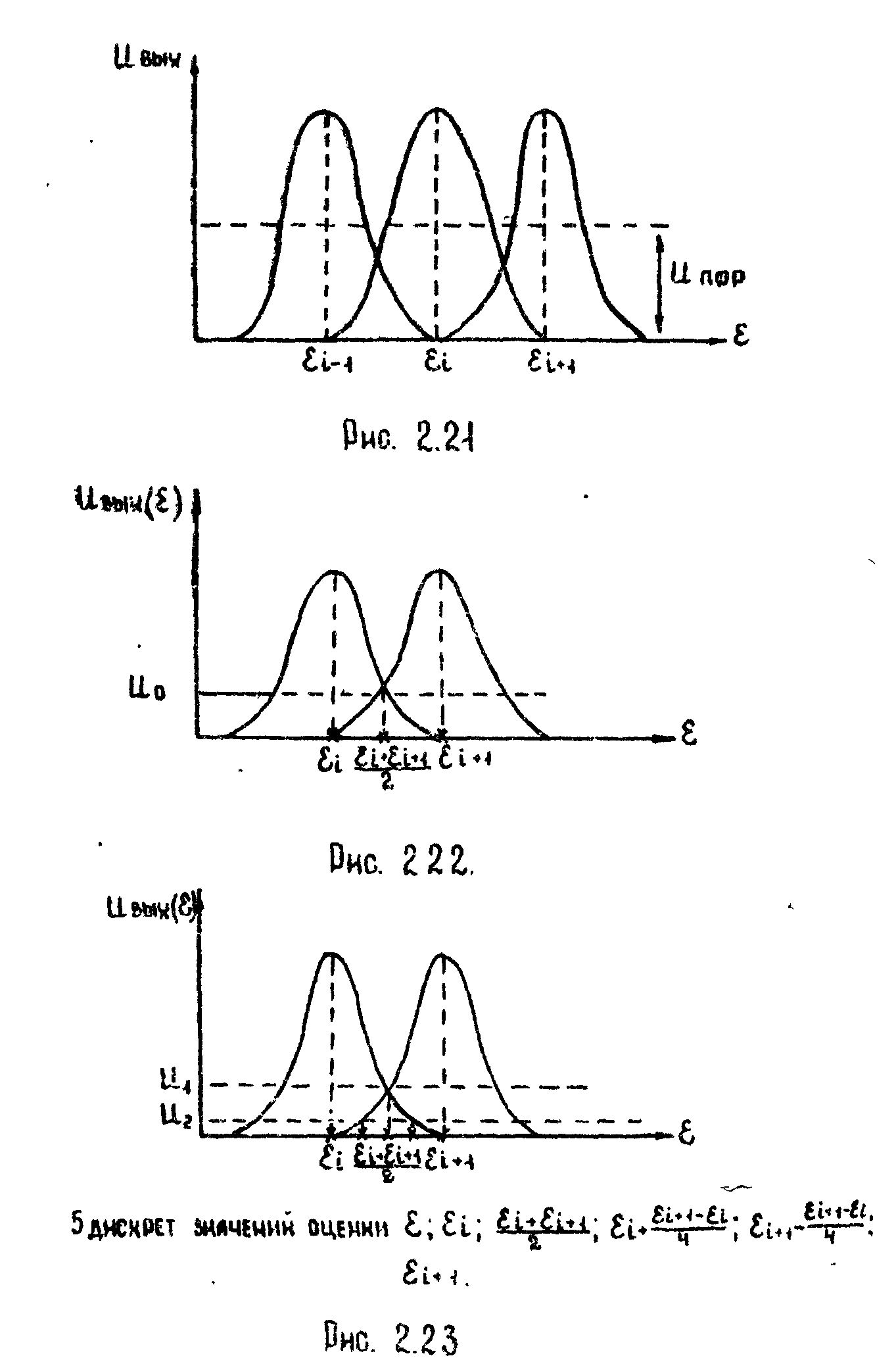
При превышении сигналом порога только в одном i-ом канале за угол места цели принимается угол места максимума лепестка этого канала i. Если же сигнал превышает порог в двух соседних каналах, то углом места цели считается угол, равный среднему арифметическому углов места максимумов их лепестков:
=
![]() .
.
Таким образом, при однопороговом методе оценка угла места цели для одной пары лепестков ДНА (рис.2.22) может принимать лишь три дискретных значения (i, i+1, (i+i+1)/2). При применении многопороговых методов отсчета дискретность оценки уменьшается. Однако увеличение числа порогов вызывает значительное усложнение обработки, поэтому на практике ограничиваются двух- или трехпороговым методом (рис.2.23).
Сущность амплитудного способа (способа сравнения амплитуд) поясним с помощью рис.2.22, где в прямоугольной системе координат изображены нормированные ДНА в вертикальной плоскости двух соседних каналов. Поскольку амплитуда сигнала на выходе приемника пропорциональна значению нормированной ДНА канала при
Uвыхi = F2(ц - i), Uвыхi+1 = F2(ц - i+1),
то измеренное отношение амплитуд
при знании формы и положения максимумов ДНА позволяет определить угол места цели.
Недостатком амплитудного метода измерений является необходимость хранения в памяти спецвычислителя формы ДНА каждого канала. Неточное представление ДНА аппроксимирующей функцией может привести к значительным ошибкам. При применении амплитудного метода предъявляются жесткие требования к идентичности амплитудных характеристик приемников.
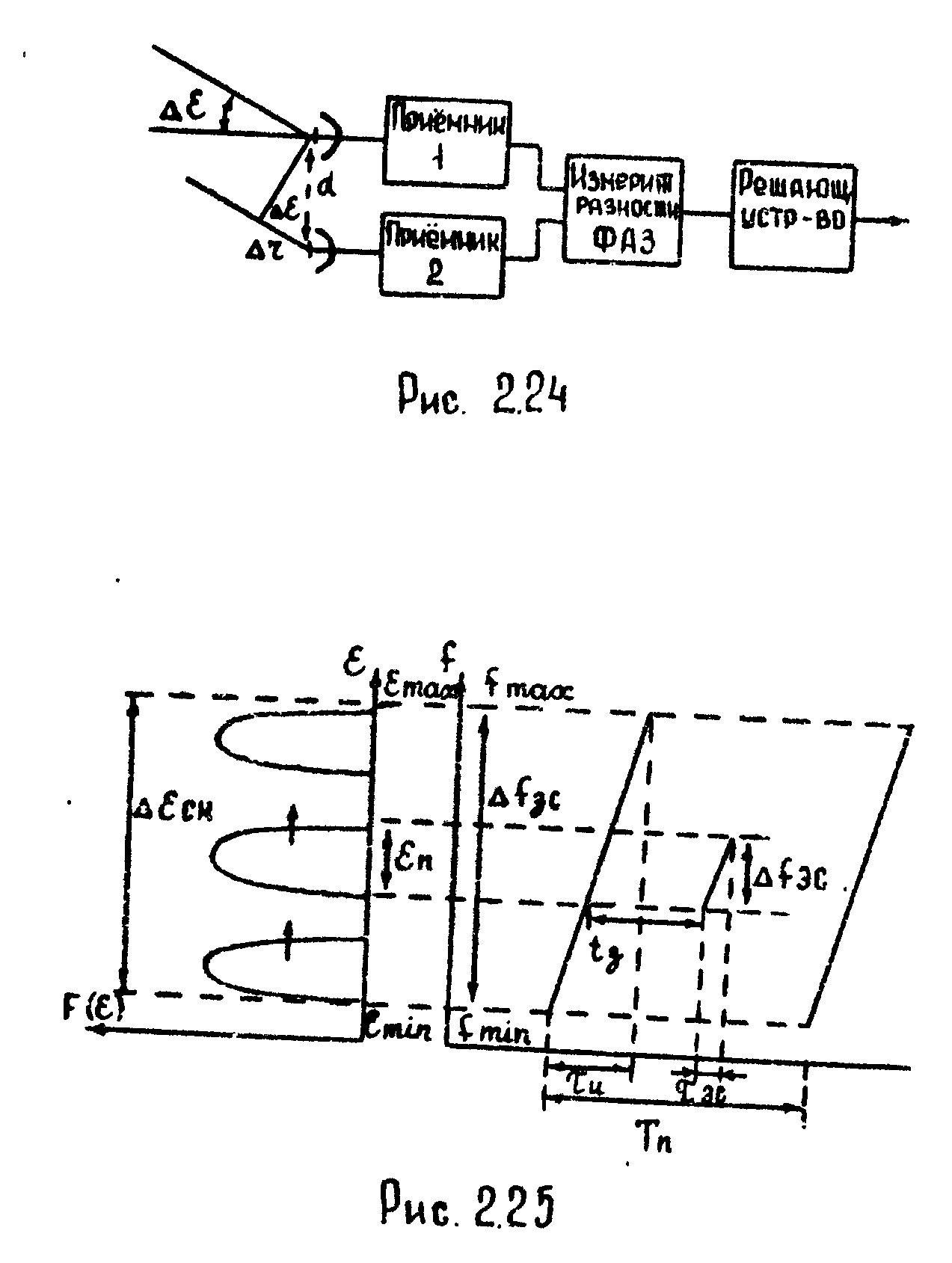
Способ сравнения фаз основан на сравнении фаз сигналов, принятых соседними парциальными каналами. Если цель находится на биссектрисе угла между направлениями максимумов двух соседних парциальных диаграмм (рис.2.21), то фазы сигналов, принятых соответствующими каналами, одинаковы. В этом случае угол места цели определяется по формуле: i = 0,5(i + i+1). Если направление на цель отклоняется от биссектрисы, то между сигналами соседних каналов возникает сдвиг по фазе, обусловленный разностью хода отраженных радиоволн (рис.2.24)
![]() .
.
Спецвычислитель определяет угол места цели по измеренной разности фаз сигналов:
![]() .
.
При фазовом методе обеспечивается высокая точность измерения угла места; при этом не требуется знание формы ДНА, но необходима высокая идентичность фазовых характеристик приемных устройств каналов. В такой ситуации, когда разность фаз сигналов превосходит 2 радиан, возникает неоднозначность в измерении . Для устранения неоднозначности может использоваться способ сравнения амплитуд сигналов или способ дискретного отсчета по пороговым уровням.
3. Метод частотного сканирования луча
Для частотного сканирования луча по углу места (5Н69) применяются зондирующий ЛЧМ сигнал и антенна с углочастотной чувствительностью в угломестной плоскости. На излучение и прием используется одна антенна.
Такая антенна формирует на излучение
один узкий в обеих плоскостях луч,
положение которого по углу места
определяется частотой подведенных к
ней колебаний. Поскольку в течение
длительности импульса передатчика и
его частота изменяется от fmin до
fmax , то за это время луч антенны
последовательно перемещается по углу
места в пределах сектора сканирования
![]() ск
от min до max
(рис.2.25).
ск
от min до max
(рис.2.25).
В результате сканирования луча цель, находящаяся под некоторым фиксированным углом места , облучается лишь частью зондирующего сигнала. Отраженный сигнал представляет собой "вырезку" из зондирующего . Его длительность эc определяется шириной ДНА по углу места л и скоростью сканирования
![]() ,
,
а девиация частоты
![]() .
.
Особенностью работы на прием антенны с частотным сканированием по сравнению с антенной с механическим сканированием является то, что она остается неподвижной в плоскости сканирования и способна принимать сигналы одновременно с любого направления на соответствующей этому направлению частоте при любом их запаздывании. Если при применении остронаправленной антенны с механическим сканированием переместить луч в новое направление (путем качания антенны) можно лишь после того, как будет принят отраженный сигнал от самой удаленной цели, то в антенне с частотным сканированием луч может перемещаться в новое направление, не дожидаясь прихода эхо-сигналов с предыдущего направления. Можно быстро, в течение и, произвести сканирование луча в заданном секторе ск, а затем в течение паузы до следующего зондирующего импульса антенна "соберет" эхо-сигналы со всех угломестных направлений. В этом смысле можно считать, что сканирует лишь ДНА на передачу, а на прием антенна формирует набор неподвижных парциальных лучей, причем направлению максимума каждого луча соответствует своя частота сигнала.
Достоинством РЛС с частотным сканированием является возможность адаптации обзора в соответствии со складывающейся воздушной и помеховой обстановкой путем изменения параметров зондирующего сигнала. Так, выбором достаточно длинного сигнала с определенной средней частотой и малой девиацией частоты можно производить длительное зондирование определенных угломестных направлений, обеспечивая тем самым обнаружение сигналов в шумовых помехах повышенной плотности.
Недостатком РЛС с частотным сканированием является невозможность использования перестройки частоты для защиты от прицельных помех, а также эффекта сжатия ЛЧМ-сигнала при обработке.