

2.4 Формирование зоны обнаружения в дальномерах и высотомерах
2.4.1. Требования к зоне обнаружения рлк
Для успешного решения задач радиолокационной разведки и выдачи информации зона обнаружения РЛК (РЛС) боевого режима в вертикальной плоскости должна быть косекансной (рис.2.12). Ее основными параметрами являются максимальная дальность Дмакс и высота Нмакс обнаружения целей с определенной ЭПР, минимальный мин и максимальный макс углы места. Параметры зоны обнаружения РЛК выбираются из следующих соображений.

Максимальная дальность обнаружения определяется, в основном, возможностями формирования и излучения зондирующих сигналов. Она ограниченна и составляет ~ 400 км.
Так как верхний ярус радиолокационного поля обеспечивается главным образом зонами обнаружения РЛК (РЛС) боевого режима, то верхняя граница зоны обнаружения должна соответствовать требованиям к радиолокационному полю по максимальной высоте, т.е. составлять 40...60 км по целям с ц = 1м2.
Обнаружение всех целей на максимальных дальностях обеспечивается при близких к нулевому или отрицательных значениях мин, если существует превышение позиции РЛС над местностью.
Используя соотношение = arcsin (H/r - r/2Rзэ), можно получить, что цели, летящие на Н = 10 км и дальности 400 км, наблюдаются под углами места 0, а на Н = 20 км, = 1,5. Однако на значение min влияет наличие углов закрытия позиции и возможные искажения нижней кромки ДНА из-за влияния земли. Поэтому уменьшение значения мин с целью выполнения требований по обнаружению целей на максимальных дальностях может быть обеспечено за счет подъема фазового центра антенны над поверхностью земли. Высота фазового центра антенны РЛС составляет 6...10 м, что явно недостаточно. В настоящее время подъем электрического центра антенны обеспечивается использованием насыпных горок высотой 6...8 м или естественных возвышенностей. Целесообразно также использование башен, подъемных платформ высотой 20...30 м и более. При этом необходимо осуществлять подъем ППК с антенными устройствами, масса которых составляет 15...20 т. Это обстоятельство является ограничивающим фактором в применении данных мероприятий. Кроме того, имеют место трудности, связанные с эксплуатацией и техническим обслуживанием РЛС в таких условиях. Поэтому на практике выбирают мин = ( 0,25...0,5), а изменениея наклона антенны по углу места относительно горизонта позволяет осуществить обзор и при отрицательных углах места.
Значения максимального угла места зоны обнаружения ограничиваются конструкцией антенных устройств, электрическая ось которых ориентирована под малыми углами места, а под большими углами места раскрыв антенны близок к нулю. Решение задачи увеличения max становится возможным при использовании ФАР.
2.4.2. Формирование зоны обнаружения в дальномерах рлк.
Форма зоны обнаружения дальномеров в горизонтальной плоскости (рис.2.12) должна быть круговой, а в вертикальной плоскости - такой, чтобы для нижних углов места min o обеспечивалась заданная дальность обнаружения и для угла места 0 max заданная фиксированная высота.
Значение 0 определяется требуемыми значениями максимальной высоты Нmax и максимальной дальности Дmax обнаружения цели:
0 = arcsin Hmax/Дmax .
Аналитически такая зона (зависимость дальности обнаружения от угла места цели) описывается выражением:
![]()
и носит название косекансной. Получение зоны обнаружения требуемой формы достигается выбором формы ДНА дальномеров, вида и параметров обзора пространства. В РЛС используются антенны направленного действия, что приводит к необходимости осуществления обзора пространства. В дальномерах выбирают ДНА узкой по азимуту и широкой по углу места. При этом обеспечивается одновременный обзор всех углов места в пределах min - max и последовательный (путем вращения антенны) обзор по азимуту. Такой вид обзора называется одномерным.
Косекансная форма зоны обнаружения в вертикальной плоскости может быть получена путем одноканального либо многоканального построения приемо-передающего и антенно-волноводного трактов дальномера.
При одноканальном построении зона создается с помощью одного широкого луча антенны, перекрывающего заданные углы места. Требуемая форма зоны обеспечивается путем выбора зеркала с переменной кривизной в вертикальной плоскости. При многоканальном построении дальномеров требуемая зона формируется с помощью нескольких смещенных друг относительно друга по углу места сравнительно узких лучей (рис.2.13), причем лучи верхних углов места (o - max) обеспечивают косекансную форму зоны обзора. С каждым лучом антенны связан свой передатчик и приемник. Выход каждого приемника может быть подключен к своему индикатору (или устройству автосъема данных) или выходы всех приемников объединяются на общий индикатор (общее устройство автосъема).
Многоканальное построение зоны обнаружения является более сложным, но имеет ряд достоинств по сравнению с одноканальным.
Во-первых, повышается помехозащищенность дальномеров, так как рабочие частоты могут быть выбраны различными, с достаточно большим разносом относительно друг друга.
Во-вторых, если каждый луч формируется с помощью отдельной антенны, то представляется некоторая возможность управления формой зоны в соответствии с воздушной и помеховой обстановкой, как, например:
совмещение нескольких лучей с целью увеличения дальности или потолка обнаружения целей под определенными углами места и повышения помехозащищенности дальномера от активных и пассивных помех в выбранном угломестном направлении;
выключение или загрубление усиления отдельных перегруженных помехами приемных каналов с целью обеспечения и проводки целей другими каналами;
выключение отдельных передающих каналов при обнаружении пуска противорадиолокационных ракет с целью снижения вероятности наведения их на РЛК и т.д.
В-третьих, повышается надежность дальномера, так как отказ одного из каналов при наличии возможности управления зоной обнаружения не означает выхода из строя отказа всего дальномера.
В-четвертых, при многоканальном построении зоны обнаружения используются большие площади (коэффициенты усиления антенн в каждом угломестном направлении, благодаря чему достигается существенный выигрыш в потребной энергии (мощности) передающего устройства. Действительно, из формулы радиолокации

следует, что коэффициент усиления антенны в большей мере влияет на дальность обнаружения, чем другие энергетические параметры РЛС. Так, при сужении ДНА в n раз (путем соответствующего увеличения размеров антенны) во столько же раз возрастает коэффициент усиления антенны G.
При этом мощность n-канального передатчика можно уменьшить в n2 раз, а число каналов увеличивается в n раз. В результате будет иметь место выигрыш в суммарной мощности передающих устройств в n раз.
Безусловно, увеличение размеров антенны и числа каналов приводит к возрастанию объема аппаратуры дальномеров и их усложнению. Поэтому узкими делают лишь лучи, перекрывающие нижние углы места (min- o), где цели должны обнаруживаться на максимальных дальностях. Лучи же верхних углов места (o-max) должны быть более широкими, так как дальность обнаружения здесь существенно меньше. В горизонтальной плоскости лучи каналов выбирают одинаковой ширины. Оптимальное общее число каналов - 4...5. Так, в дальномерах 5Н87 два луча шириной 5 перекрывают нижние углы места, а два луча шириной 8 и 27 - верхние углы места.
Дальномеры измеряют дальность и азимут обнаруженных целей. Дальность определяется по времени запаздывания (tзап) отраженных сигналов относительно зондирующих r = c tзап/2, а азимут - по положению луча антенны, соответствующему центру пачки импульсов.
Для формирования требуемой зоны обнаружения антенные устройства дальномеров РЛК боевого режима устанавливаются на ППК. При этом обеспечивается простота канализации энергии зондирующего сигнала к антенне, сокращение длины волноводных трактов, а следовательно, уменьшение потерь в них, отсутствие вращающихся сочленений. Большой вес ППК приводит к необходимости использования приводов вращения большой мощности. Потребляемая ими электроэнергия может составлять до 30-40 % от электроэнергии, потребляемой РЛС. Однако, несмотря на этот недостаток, совмещение антенн с ППК является целесообразным.
2.4.3. Обзор пространства и измерение координат в ПРВ
Высотомер представляет собой одноканальную импульсную РЛС. Его антенна формирует однолепестковую диаграмму направленности лопаточного вида. Для осуществления обзора пространства и измерения угла места цели производится механическое качание антенны в вертикальной плоскости. Система вращения антенны (или ППК) обеспечивает установку антенны на азимут цели либо вращение ее с заданной скоростью вкруговую или в установленном секторе.
Для получения требуемой точности измерения угла места целей и разрешающей способности по углу места ДНА в вертикальной плоскости выбирают узкой (0,5 ... 0,8). Дальнейшее сужение ДНА потребовало бы для сохранения числа импульсов в пачке, равного 8...10, снижения скорости качания антенны.
В ПРВ высота цели непосредственно не измеряется. Она вычисляется по известным значениям дальности Д и угла места . Зависимость Н = H(Д, ) называют уравнением высоты. Найдем эту зависимость. Пусть в точке А (рис.2.14) размещен ПРВ, в точке В - цель.
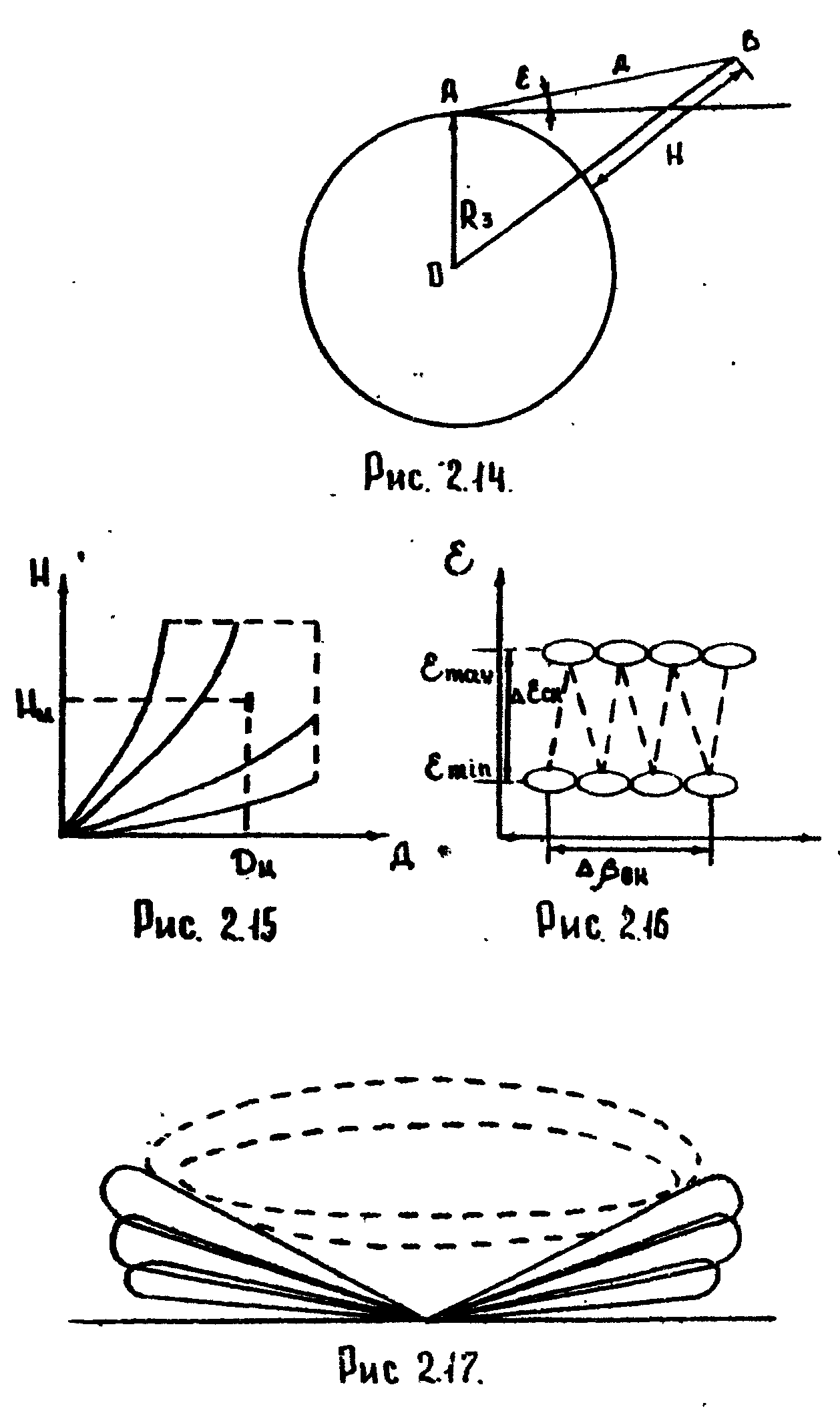
Из треугольника ОАВ по теореме косинусов получим:
(Rз + H)2 = Д2 +Rз2 - 2Д Rз cos( + 90),
где Rз- радиус Земли.
Раскрывая скобку в левой части равенства и пренебрегая в ней значением Н2 по сравнению с другими слагаемыми, а также учитывая, что cos (90+)=- sin, получим Н = Д sin + Д2/2Rз.
Как известно, неоднородность тропосферных слоев атмосферы приводит к искривлению траектории радиоволн (рефракции). Величина и характер рефракции зависят от скорости изменения коэффициента преломления n при изменении высоты ( от градиента по высоте). В стандартной атмосфере при увеличении высоты барометрическое давление и содержание водяных паров снижаются быстрее, чем температура. Поэтому с увеличением высоты значение n уменьшается, что вызывает искривление траектории радиоволн и вносит ошибки в измерение координат, и особенно угла места цели.
Учет влияния рефракции обычно производится путем замены R3 = 6370 км на так называемый эквивалентный радиус Земли Rзэ =8500 км. Уравнение высоты в этом случае принимает вид:
![]() . (2.7)
. (2.7)
Следовательно, определение высоты цели сводится к измерению ее наклонной дальности Д, угла места и расчету высоты по формуле (2.7). Дальность до цели в ПРВ измеряется, как и в дальномерах, импульсным методом. Для определения на валу качания зеркала устанавливается датчик угла места, с которого в каждый момент времени выдается напряжение, пропорциональное синусу угла места максимума луча антенны. Для определения высоты фиксируется значение синуса угла места в момент приема центра пачки отраженных импульсов.
Определение высоты производится по индикатору высоты (ИВ), который обеспечивает автоматическое решение уравнения (2.7). На экране ИВ создается растровая развертка в координатах: дальность (по горизонтали)- высота ( по вертикали).
Напряжение развертки дальности является линейным Uд = t, а развертки высоты в соответствии с (2.7) - параболическим:
Uн = а t sin + b t2 .
Запуск генераторов разверток производится в каждом периоде следования импульсами запуска ПРВ. В исходном положении ( перед импульсами запуска) луч ЭЛТ ИВ находится в левом нижнем углу экрана. В результате воздействия двух отклоняющих напряжений луч вычерчивает на экране параболу, положение которой на экране при качании антенны плавно изменяется (рис.2.15).
ПРВ позволяют измерять не только Нц, но и плоскостные координаты (Д и ), для чего в них помимо ИВ устанавливают ИКО. Поэтому кроме основного режима (определение Нц) предусматривают и дополнительные, автономные - секторный и круговой.
При секторном режиме работы антенна ПРВ достаточно быстро качается по углу места и медленно разворачивается по азимуту в установленном секторе (рис.2.16). Этот режим может задаваться ПРВ для обзора секторов, в которых дальномер перегружен шумовыми помехами, а также для обнаружения высотных малоразмерных целей.
При работе в круговом режиме антенна ПРВ фиксируется на заданном угле места и с высокой скоростью вращается по азимуту. Данный режим используется в основном с целью обнаружения маловысотных целей. Для расширения пределов работы по углу места применяют двух- или трехвитковый режимы обзора с автоматическим изменением положения антенны по углу места через каждый оборот антенны по азимуту (рис.2.17). Дальнейшее увеличение числа витков приведет к недопустимому увеличению времени обзора.