

2. Методы обзора пространства, применяемые в срл ртв
Радиолокационное поле активной локации, формируемое СРЛ радиотехнических подразделений, является той материальной основой, которая обеспечивает решение РТВ задач радиолокационной разведки, выдачи разведывательной и боевой информации. Оно создается с помощью зон обнаружения импульсных РЛС и радиолокационных высотомеров.
Зона обзора должна быть такой, чтобы обеспечить надежное обнаружение и проводку современных и перспективных СВН противника во всем диапазоне высот их полета на максимально возможной дальности. Выполнение требований к зоне обзора обеспечивается применением различных способов обзора пространства.
В данной главе рассматриваются основные характеристики зоны обзора и способы обзора пространства, используемые в СРЛ РТВ.
2.1. Зона обнаружения срл и ее характеристики
Зоной обнаружения РЛС, как указывалось выше, называется область пространства, в пределах которой РЛС обеспечивает обнаружение целей, обладающих заданной ЭПР, с вероятностями правильного обнаружения и ложной тревоги не хуже требуемых.
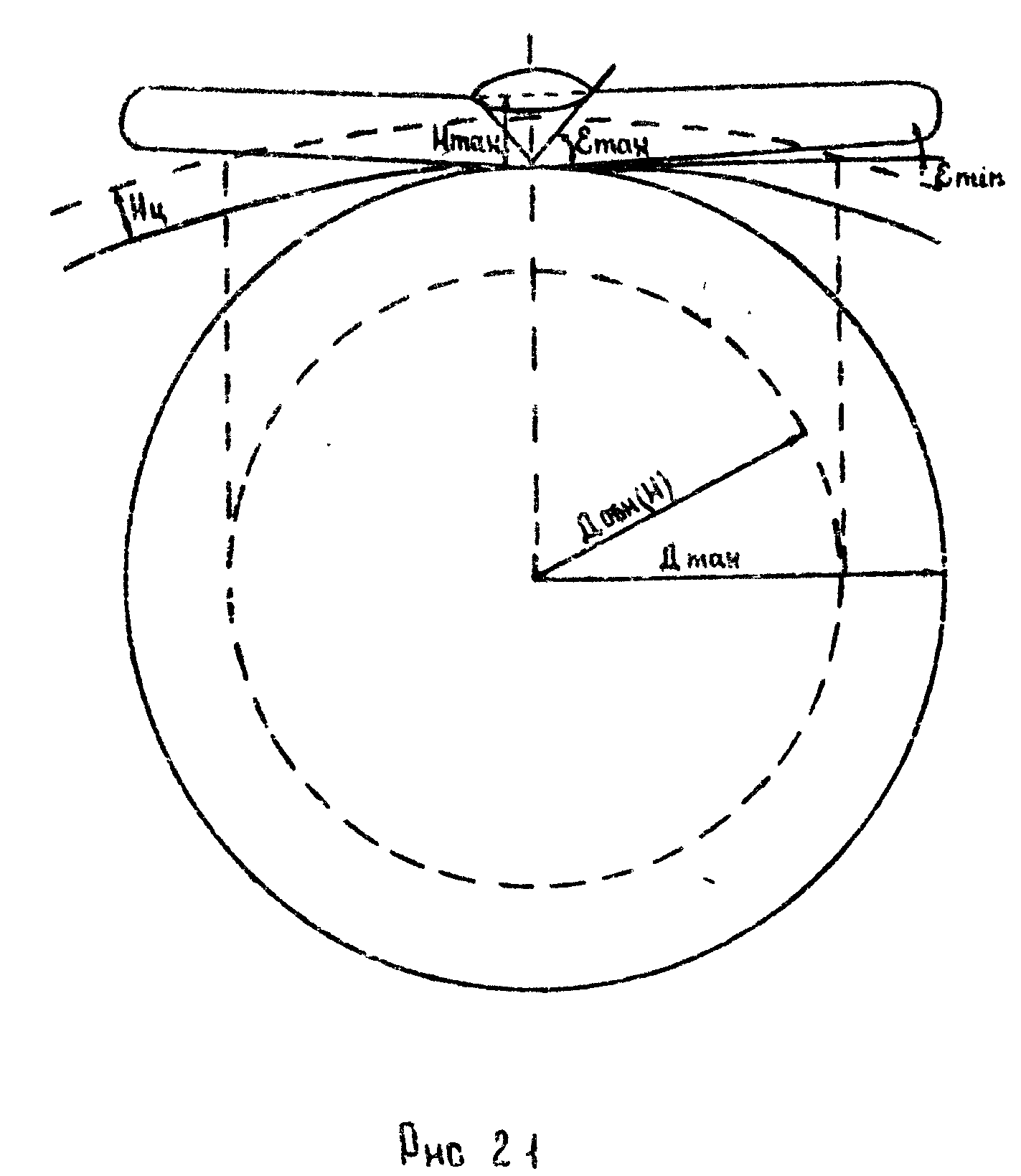
Практически пользуются не пространственной зоной обнаружения РЛС, а ее полусечением в вертикальной и горизонтальной плоскостях (рис.2.1). Размеры и форму зоны обнаружения характеризуют ее пределами по углу места (макс,мин), максимальной высотой (Нмакс) и максимальной дальностью (Дмакс).
Параметры зоны выбираются с учетом тактических требований и технических возможностей их реализации. Так, значение мин в РЛС сантиметрового диапазона ограничивается условиями распространения сантиметровых волн в приземном слое атмосферы. С одной стороны, необходимо выбрать мин как можно более близким к нулю, а с другой — "оторвать" диаграмму направленности от земли, так как облучение земной поверхности в сантиметровом диапазоне приводит к сильной изрезанности зоны на малых углах места вследствие интерференции прямого и отраженного от поверхности земли лучей. Из-за движения под действием ветра покрывающих поверхность кустов, травы непрерывно изменяются амплитуда и фаза отраженного сигнала, а следовательно - форма зоны. Практически в сантиметровом диапазоне выбирают мин 0,4...0,50.
Для снижения мин до нуля и даже до отрицательных значений в некоторых РЛС предусматривается изменение наклона антенны в вертикальной плоскости.
В метровом и верхней части дециметрового диапазона волн зона обзора формируется с учетом влияния земли и значение мин для ровного участка практически однозначно определяется отношением длины волны к высоте подъема фазового центра антенны hа:
мин 7,2 /hа .
Максимальный угол места зоны emax для исключения "мертвой воронки" желательно было бы выбирать равным 900. Однако это привело бы к значительному усложнению конструкции антенной системы. В настоящее время считается целесообразным выбор значений макс 35...450 в сантиметровом диапазоне и 20...300 - в метровом. При этом радиус "мертвой воронки", равный Rмв = Hцсtgмакс, соответственно составляет (1...1,5)Hц и (2...4,5)Hц.
Верхняя граница зоны Нмакс должна быть не меньше потолка полета состоящих на вооружении и перспективных СВН противника. Для современных РЛС Нмакс (40...60) км.
Максимальную дальность обнаружения Дмакс целей, летящих на максимальной высоте Нмакс, желательно получить равной дальности прямой видимости:
rпр
= 4,12 (![]() )
600...800 км,
)
600...800 км,
где rпр - в километрах, hа и Hмакс - в метрах.
Однако получение таких дальностей связано со значительным увеличением мощности передающего устройства и, как следствие, с увеличением стоимости и объема аппаратуры РЛС. Поэтому в настоящее время обеспечивают дальность обнаружения, близкую к дальности прямой видимости, только для маловысотных целей и целей с большими средними значениями эффективной отражающей поверхности ц. По цели с ц = 1м2 в РЛС обнаружения и наведения считается приемлемым получение дальности Дмакс= 300...400 км.