4.5 Системы селекции движущихся целей (сдц)
Системы СДЦ представляют собой комплекс специальных средств, обеспечивающих выделение движущихся целей на фоне отражений от неподвижных или медленно перемещающихся объектов. Такими объектами могут быть различные местные предметы, гидрометеоры (облака» дождь, снег), специально разбрасываемые металлизированные ленты, поверхности моря м др.
Для радиолокации, основанной на приеме отраженных импульсов электромагнитной энергии, отражения от перечисленных объектов будут создавать мешающее действие. Такие мешающие отражения называют пассивными помехами. Их интенсивность может быть больше интенсивности полезного сигнала, и поэтому полезный сигнал может быть потерян.
Выделение полезного сигнала па фоне пассивных помех основано на различии частот отраженных сигналов. Радиальные доставляющие скоростей движения цели и источников пассивных помех различны. Это и служит основой устройства аппаратуры СДЦ.
Когерентными они называются потому, что в них в качестве опорных колебании, с которыми сравниваются отраженные сигналы, используются колебания специального источника, называемого когерентным гетеродином. Эти колебания по фазе жестко синхронизированы с колебаниями передатчика такт что разности фаз между ними сохраняется постоянной в каждом периоде посылки импульсов. Также жестко синхронизированные колебания принято называть когерентными колебаниями.
При работе РЛС импульсы в высокочастотной энергии передатчика излучаются антенной в пространство, где облучают как подвижные, так и малоподвижные объекты, Частоты сигналов, отраженных от неподвижных (малоподвижных) объектов, отличаются от сигналов подвижных целей (эффект Доплера) и, следовательно, имеют различные фазы. Причем фаза колебаний отраженных от подвижных объектов, будет все время меняться, тогда как фаза неподвижных объектов не изменяется. Очевидно, что достаточно каким-то устройством уловить это изменение фазы и тогда можно выделить движущиеся объекты на фоне пассивных помех.
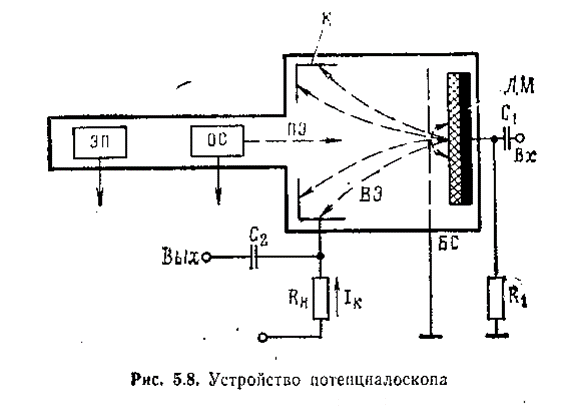
На рис. 5.7 представлена упрощенная структурная схема селекции движущихся целей в импульсных РЛС. Импульсные системы СДЦ называют когерентно-импульсными.
Часть энергии высокочастотных колебании передатчика подается на смеситель фазирования, на этот же смеситель подаются колебания местного гетеродина. В результате создаются фазирующие импульсы промежуточной частоты, которые затем подаются на когерентный гетеродин для фазирования его колебаний. Частота н фаза колебаний когерентного гетеродина становится равной частоте и фазе колебаний фазирующего импульса. Таким путем обеспечивается когерентность колебаний когерентного гетеродина с передатчиком. С когерентного гетеродина сфазированное напряжение транзитом через схему компенсации ветра подается на фазовый детектор, куда, кроме того, поступает отраженный сигнал, также преобразованный в сигнал промежуточной частоты с помощью того же местного гетеродина. Амплитудный ограничитель перед фазовым детектором устраняет паразитную модуляцию сигналов неподвижных объектов, образующуюся, например, в результате движения антенны и других причин.
На выходе фазового детектора создается напряжение в форме видеоимпульсов, амплитуда и полярность которых зависят от соотношения частот когерентного гетеродина и принятого сигнала.
Если частота генератора, местного гетеродина и когерентного гетеродина стабильна, то для неподвижных объектов видеосигналы на выходе фазового детектора имеют от периода к периоду постоянную амплитуду. Если же имеются отражения от движущейся цели, то на выходе фазового детектора будут видеоимпульсы, амплитуда которых от периода к периоду будет изменяться по закону так называемой доплеровской частоты.
С выхода фазового детектора сигналы подаются в компенсирующее устройство, где осуществляется череспериодное вычитание сигналов.
Если амплитуда видеоимпульсов от периода к периоду не изменяется, то равные импульсы предшествующего н последующего периодов в вычитающем устройстве блока компенсации подавляются, устраняя мешающее действие пассивных помех. Если же амплитуды импульсов изменяются (для движущихся целей), то выделяется результирующее напряжение. Таким образом, происходит выделение полезных сигналов при наличии пассивных помех.
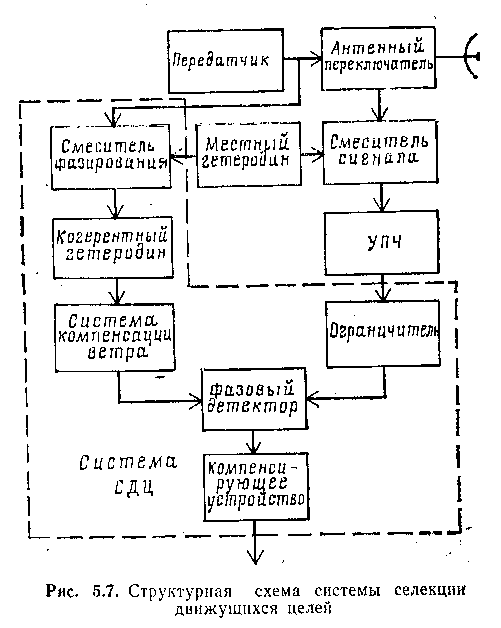
В качестве компенсирующего устройства чаще всего применяется потенциалоскоп (рис. 5.8), который одновременно выполняет функции запоминания и компенсации.
Такие источники помех, как металлизированные лепты, дождевые облака, могут перемещаться под действием ветра, имея регулярную составляющую скорости. В этом случае на выходе компенсирующего устройства будут иметь место остатки некомпенсированных помех. Для устранения этих остатков имеется специальное устройство «компенсация ветра». При включении его изменяют частоту когерентного гетеродина настолько, насколько изменяется частота сигнала, отраженного от движущегося источника помехи. Благодаря этому фаза помехи относительно когерентных колебаний от периода к периоду остается постоянной, улучшая качество компенсации помех.
При применении аппаратуры СДЦ имеет место один недостаток — это появление, так называемых «слепых» скоростей. В тех случаях, когда за время между периодами повторения импульсов Ти цель проходит расстояния, кратные половине длины волны Х/2, на выходе компенсирующего устройства сигнал будет равен нулю, и цель не может быть обнаружена. Для устранения этого недостатка в РЛС с СДЦ применяют переменную частоту повторения импульсов. Если для одной частоты радиальная составляющая скорости «слепая», то на другой частоте повторения цель может быть обнаружена.