

3.1.3 Вторичная обработка рли
Сведения о воздушных объектах, полученные в результате первичной обработки, не избавлены полностью от влияния различных помех. Вследствие этого возникает необходимость дальнейшей обработки радиолокационной информации на основе использования информации, полученной в нескольких смежных обзорах пространства. .
Очередным этапом обработки РЛИ является вторичная обработка. В отличие от первичной она производится над сведениями о целях, полученными за несколько периодов обзора пространства.
Вторичная обработка предназначена для устранения ошибок, оставшихся после первичной обработки, а также для извлечения дополнительных сведений о целях, таких, как данные о их скоростях, курсовых углах п т. п.
Сущность вторичной обработки состоит в обнаружении траектории движущихся целей и в их непрерывном сопровождении.
Вторичная обработка РЛИ может производиться вручную (визуально), полуавтоматически и автоматически. В настоящее время наибольшее распространение получили полуавтоматические системы вторичной обработки.
В полуавтоматических системах вторичной обработки обнаружение траекторий, называемое также захватом целей на сопровождение, производится оператором путем наблюдения отметок на экране индикатора и анализа характера их перемещения от обзора к обзору.
Обнаружив на экране индикатора новую отметку, оператор с помощью специального устройства, аналогичного по принципу действия схеме рис. 4.2, производит съем координат этой отметки.
Если в очередном периоде обзора пространства на экране индикатора вновь появляется отметка, находящаяся на небольшом удалении от первой, то оператор производит съем координат второй отметки и с помощью специальной кнопки выдает в ЦВМ признак вновь обнаруженной траектории.
Сопровождение обнаруженных траекторий может осуществляться или полуав-томатически, или автоматически.
Принцип полуавтоматического сопровождения траекторий (рис. 4.6) состоит в следующем.
Оператор, произведя обнаружение новой траектории, осуществляет съём координат первых двух отметок от цели. Эти данные через устройство выдачи информации (УВИ) поступают в ЦВМ. В цифровой вычислительной машине по определенному алгоритму производится расчет координат ожидаемой отметки от цели в будущем периоде обзора пространства. Такая предсказанная отметка называется экстраполяционной точкой (ЭТ).
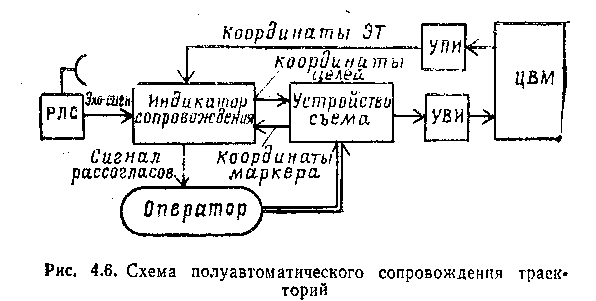
Координаты ЭТ с выхода ЦВМ через устройство приема информации (УПИ) поступают на аппаратуру индикатора сопровождения, обусловливая появление на его экране специальной отметки – экстраполяционной точки.
При поступлении от РЛС очередной отметки от цели оператор, наблюдая картину на экране индикатора, производит визуальное сравнение координат текущей отметки и экстраполяционной точки, после чего с помощью устройства съема выдает через УВИ в цифровую вычислительную машину необходимые поправки (корректуры) для расчета координат очередной ЭТ. Далее процесс повторяется.
Таким образом, в ходе полуавтоматического сопровождения траекторий оператор в каждом периоде обзора пространства производит измерение рассогласования в координатах текущей отметки и экстраполяционной точки, а также осуществляет на основе этого измерения ввод в ЦВМ необходимых поправок (корректур). Результатом сопровождения траекторий являются вырабатываемые цифровой вычислительной машиной уточненные данные о координатах, составляющих скорости и других параметрах каждой из сопровождаемых целей.
Наряду с полуавтоматическим сопровождением траекторий в современных зарубежных АСУ используется также и принцип автоматического сопровождения. Сущность этого принципа сопровождения траекторий поясним с помощью схемы, показанной на рис. 4.7.
Оператор, обнаружив на экране индикатора новую отметку, производит съем ее координат в двух смежных обзорах пространства.
По данным первых двух съемов координат цели цифровая вычислительная машина, как и при полуавтоматическом сопровождении, производит расчет координат экстраполяционной точки (ЭТ). Данные о координатах ЭТ через устройство приема информации (УПИ) поступают в устройство стробирования.
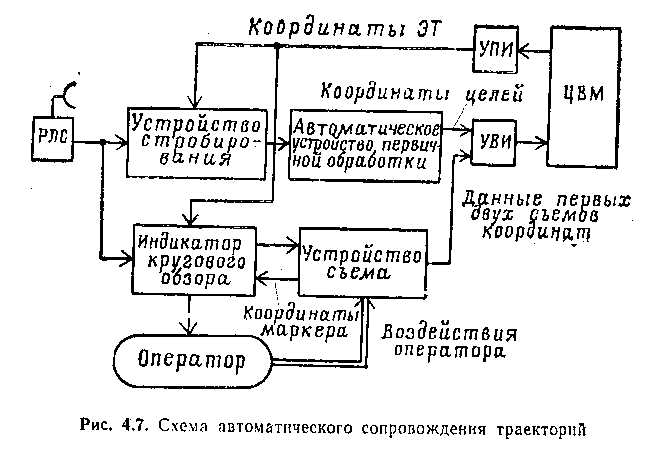
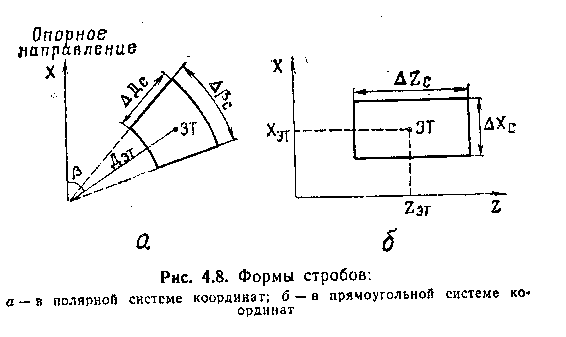
Устройство стробирования выдает для отработки только те поступающие от РЛС эхо-сигналы, которые приходят из ограниченной зоны обзора пространства, называемой стробом. Центр строба совпадает с ЭТ.
Форма строба может быть различной в зависимости от выбранной при обработке системы координат, способа технической реализации стробирования и других факторов. Наиболее распространенные в АСУ формы стробов показаны на рис. 4.8.
Сигналы, поступающие из области пространства, соответствующей выставляемому стробу, подвергаются первичной обработке в автоматическом устройстве.
Измеренные автоматическим устройством координаты отметок, лежащих внутри строба, выдаются в виде цифровых кодов в ЦВМ, где производится расчет координат очередной экстраполяционной точки.
Функции оператора при автоматическом сопровождении траекторий после первых двух съемов координат заключаются лишь в контроле по индикатору кругового обзора за работой автоматической системы сопровождения.
Большое значение при вторичной обработке РЛИ имеет сопровождение постановщиков активных помех.
 Как
известно, радиолокационная станция
позволяет измерить лишь азимут (угол
места) постановщика активных помех,
определяемый как азимут (угол места)
середины сектора шумовой засветки (рис.
4.9). Это не дает возможности по данным
одной РЛС однозначно определить
местоположение постановщика активных
помех. Определение его координат
осуществляется в связи с этим в процессе
третичной обработки по данным об
азимутах и углах места, получаемых от
нескольких радиолокационных станций.
Для решения этой задачи системы вторичной
обработки РЛИ должны непрерывно
сопровождать постановщики активных
помех по угловым координатам.
Как
известно, радиолокационная станция
позволяет измерить лишь азимут (угол
места) постановщика активных помех,
определяемый как азимут (угол места)
середины сектора шумовой засветки (рис.
4.9). Это не дает возможности по данным
одной РЛС однозначно определить
местоположение постановщика активных
помех. Определение его координат
осуществляется в связи с этим в процессе
третичной обработки по данным об
азимутах и углах места, получаемых от
нескольких радиолокационных станций.
Для решения этой задачи системы вторичной
обработки РЛИ должны непрерывно
сопровождать постановщики активных
помех по угловым координатам.
Сопровождение постановщика активной помехи может производиться аналогично сопровождению обычной радиолокационной цели, если ему вместо недостающей координаты–дальности приписать некоторую условную дальность Dyn (рис. 4.9) и результаты сопровождения снабжать специальным признаком «постановщик активных помех».
Значение Dyn может быть выбрано любым, однако для удобства работы оператора величину Dyn принимают равной максимальному значению шкалы дальности индикатора, на котором решаются задачи сопровождения.
Наряду с решением описанных выше задач в процессе вторичном обработки производится выявление дополнительных сведений о целях, например, данных о их скоростях, курсовых углах и т. п.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.В чем состоит основное отличие вторичной обработки от первичной?
2.Принцип полуавтоматического сопровождения траекторий.
3.Принцип автоматического сопровождения траекторий.
4.В чем состоят функции оператора при полуавтоматическом и автоматическом сопровождении траекторий?
5. Особенности сопровождения постановщиков активных помех.