

2.11.4 Канал формирования развертки дальности
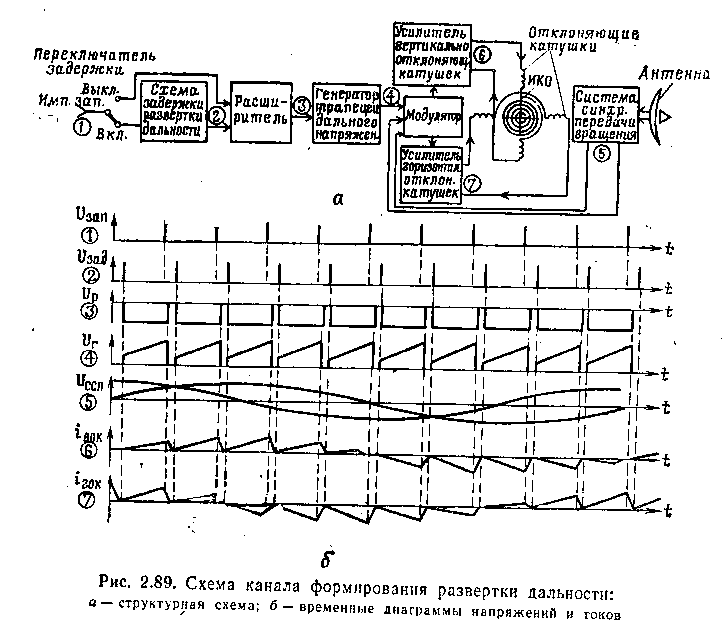
При рассмотрении схемы ИКО указывалось, что в канале развертки дальности формируется напряжение для отклоняющих катушек. Рассмотрим, как это происходит. Структурная схема и временные диаграммы напряжений и токов канала показаны на рис. 2.89.
Если импульсы запуска (рис. 2.89,1) поступают на схему задержки развертки дальности 1, то она (выполненная по схеме мультивибратора или фантастрона) обеспечивает задержку им пульсов запуска. Эта схема фиксирует начало формирования развертки с выбранной задержкой во времени (рис. 2.89,2).
Задержанные импульсы запуска поступают на расширитель 2, который вырабаты-вает прямоугольные импульсы с длительностью определяющей длину развертки, а значит, и длительность трапецеидальных импульсов напряжения (рис. 2.89, 3, 4). За это время электронный луч в трубке перемещается от центра экрана к краю его. Создается линия развертки.
Трапецеидальное напряжение усилителями мощности вертикальных и горизонтальных отклоняющих катушек преобразуется в пилообразные импульсы тока, которые проходят через отклоняющие катушки. Причем импульсы тока промодулированы напряжением синхронно-следящей передачи вращения антенны (рис. 2.89 5).
Модуляция осуществляется модулятором.
Вертикально отклоняющие катушки расположены перпендикулярно к горизон-тально отклоняющим катушкам, создавая тем самым сдвиг в пространстве на 90°. Обе пары катушек питаются импульсными токами, которые сдвинуты во времени на 90°
(рис. 2.89,6,7). Это и позволяет получить вращающееся магнитное поле при неподвиж-ных отклоняющих катушках, а значит, вращение развертки по азимуту.
В индикаторах кругового обзора иногда применяется диаметрально-круговая развертка, когда электронный луч перемещается от одного края экрана к другому через центр его. Для получения такой развертки отклоняющие катушки питаются импульсами тока, полярность которых меняется каждый такт следования импульсов запуска на противоположную. Одновременно с этим коммутируется соответственно подача сигналов на ЭЛТ в канале усиления видеосигналов.
2.11.5 Краткие сведения об индикаторах измерения высоты
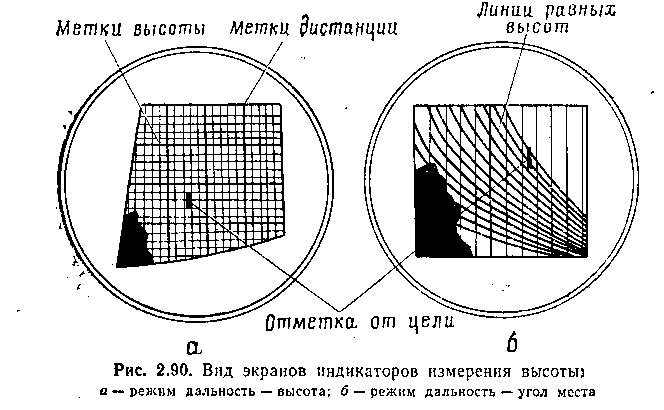
Существует несколько методов определения высоты полета радиолокационных целей. Наиболее распространенным методом является метод качания остронаправленной диаграммы направленности антенны по углу места. Для определения высоты полета таким методом индикатор высоты радиолокационного высотомера может быть реализован двумя способами: в координатах дальность— угол места, в координатах дальность — высота.
Радиолокационные высотомеры имеют один индикатор высоты, который может работать в двух указанных режимах. В индикаторе этого типа горизонтальная развертка является разверткой дальности D, а вертикальная — либо разверткой высоты Н, либо разверткой угла места е, что определяется выбранным режимом работы.
Для получения растровой развертки в индикаторе высоты необходимы катушки горизонтального и вертикального отклонения питания токами, вырабатываемыми схемами развертки дальности и развертки высоты.
На рис.2.91 представлена структурная схема формирования развертки высоты. Рассмотрим ее работу. Датчик угла места формирует напряжение, пропорциональное синусу угла места, движок его механически связан с валом качания антенны. Напряжение высоты вырабатывается генератором под воздействием импульсов запуска. Это напряжение используется в формировании горизонтальной развертки непосредственным воздействием на усилитель тока. Оно же подается в канал формирования вертикальной развертки – развертки высоты. В этом канале напряжение высоты поступает на сумматор-интегратор, куда подается и напряжение с датчика угла места.
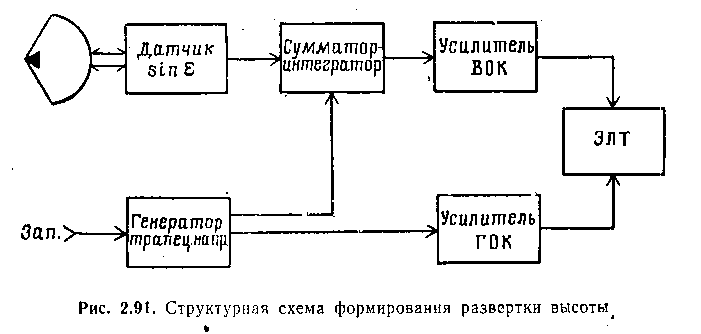
В сумматоре-интеграторе осуществляются модуляция трапецеидальных импульсов напряжением угла места и получение напряжения, обеспечивающего создание параболической развертки на индикаторе высоты. Параболическая форма развертки учитывает кривизну Земли и нормальную рефракцию. Такой учет рефракции при определении высоты полета цели является очень приближенным, что ведет к значительным ошибкам измерения высоты.
Для точного определения высоты необходимо знать изменение рефракции с изменением высоты и климатических (погодных) условий. Значит, в канал формирования развертки высоты надо вводить текущую рефракцию. Высоту полета цели с учетом изменения рефракции с высотой приближенно можно записать в виде уравнения

Масштабные отметки дальности, подаваемые на индикатор высоты, формируются самостоятельными системами в виде Последовательности кратковременных импульсов. Частота следования их определяется выбранной градацией.
Формирование отметок высоты может быть осуществлено также с помощью отметок дальности. Для этого в индикатор высоты формируется развертка высоты без учета кривизны Земли и рефракции угла места. При этом получим следующую зависимость между высотой и дальностью:
![]()
Если подать на ЭЛТ 10-км отметки дальности, то при движении развертки на экране образуются светящиеся линии, соответствующие 1-км отметкам высоты.