

1.9.3 Понятие о следящих системах
Сельсин-приемник индикаторной синхронной передачи создает на своем валу очень небольшое усилие. Это усилие может поворачивать лишь стрелку прибора. Если для вращения какого-либо механизма требуется затрачивать большую мощность, то применяется силовая синхронная передача, обычно называемая следящей системой.
Следящие системы применяются в РЛС для вращения приемно-передающих кабин, установки антенны запросчика на заданный азимут, вращения отклоняющих катушек индикаторов кругового обзора и др.
В состав следящей системы, структурная схема которой изображена на рис. 1.55, входят следующие основные части: сельсин- датчик, сельсин-приемник, усилитель мощности и исполнительный двигатель. Сельсин-приемник работает в трансформаторном режиме. Его ротор жестко связан с валом рабочего механизма. Однофазная обмотка сельсина-приемника играет роль вторичной обмотки трансформатора. Индуктированная в ней ЭДС поступает на вход усилителя мощности. Усилитель, мощности служит для усиления этого слабого сигнала до величины, достаточной для работы исполнительного двигателя.
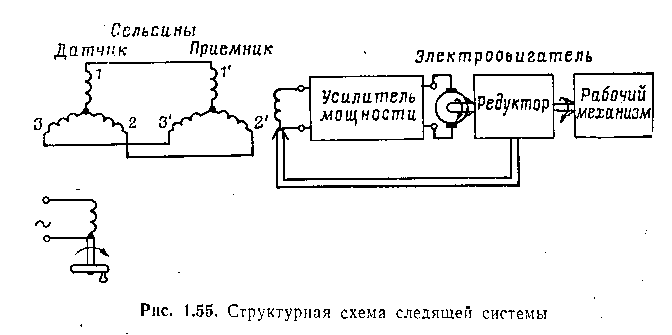
Следящая система работает следующим образом. Если роторы сельсина-датчика и сельсина-приемника расположены взаимно перпендикулярно (схема показана на рис. 1.55), то ЭДС в роторной обмотке сельсина-приемника не наводится. Это объясняется тем, что магнитное поле, созданное токами в статорной обмотке сельсина-приемника, перпендикулярно к обмотке ротора. Так как на вход усилителя сигнал не поступает, то двигатель не вращается.
При повороте ротора сельсина-датчика на некоторый угол на такой же угол повернется и магнитный поток статорной обмотки сельсина-приемника. Этот магнитный поток будет пересекать роторную обмотку, наводя в ней переменную ЭДС. Амплитуда ЭДС тем больше, чем больше угол поворота ротора сельсина-датчика. Наибольшей величины ЭДС достигает при повороте ротора сельсина-датчика на угол 90°. При этом магнитный поток статора направлен вдоль обмотки ротора.
ЭДС, наводимая в обмотке ротора сельсина-приемника, подается на вход усилителя мощности, усиливается им и приводит во вращение исполнительный двигатель. Двигатель через редуктор поворачивает вал рабочего механизма и одновременно ротор сельсина-приемника. Он вращается до тех пор, пока ротор сельсина- приемника не будет поставлен перпендикулярно к ротору сельсина-датчика. При этом сигнал на входе усилителя станет равен нулю и двигатель остановится. Рабочий механизм окажется повернут на такой же угол, что и ротор сельсина-датчика.
Если ротор сельсина-датчика непрерывно вращать в определенном направлении с постоянной скоростью, то двигатель с такой же скоростью и в ху же сторону будет поворачивать вал рабочего механизма. При этом ось механизма в своем вращении будет несколько отставать от оси ротора датчика. За счет разного углового положения этих осей на вход усилителя будет все время подаваться определенной амплитуды напряжение. Это напряжение необходимо для работы двигателя с требуемой частотой вращения. Разница в угловых положениях осей составляет ошибку системы. Чем меньше ошибка, тем точнее ось рабочего механизма «следит» за изменением положения оси ротора сельсина-датчика.