

1.7.4 Электрические двигатели постоянного тока
Электрические машины, служащие для преобразования электрической энергии постоянного тока в механическую энергию вращательного движения, называются электродвигателями постоянного тока.
Первый электродвигатель постоянного тока был изобретен в 1834 г. русским академиком Б. С. Якоби.
Работа электрического двигателя постоянного тока основана на выталкивании проводника с током из магнитного поля. По своему устройству двигатель постоянного тока ничем не отличается от генератора постоянного тока. Он имеет все те же элементы конструкции, что и генератор.
Коллектор в двигателе служит для изменения направления тока в витках обмотки якоря и обеспечения тем самым непрерывного вращения якоря. Благодаря коллектору ток в проводниках обмотки якоря, находящихся под северным полюсом, всегда имеет одно, направление, а в проводниках, находящихся под южным.полюсом, — противоположное. Этим обеспечивается вращение якоря в определенную сторону.
Произведение общей силы, действующей на обмотку якоря при работе двигателя, на радиус якоря называется вращающим моментом двигателя. Вращающий момент двигателя постоянного тока Мвр' тем больше, чем больший ток /я протекает по обмотке якоря и чем больший магнитный поток Фя создается током обмотки возбуждения, находящейся на полюсах:
![]()
Так как при вращении якоря двигателя его обмотки пересекает магнитное поле полюсов, то в ней наводится электродвижущая сила. Эта ЭДС направлена навстречу току в проводниках обмотки и называется противоэлектродвижущей силой. Следовательно, величина тока, протекающего по обмотке якоря, будет зависеть не только от величины приложенного к ней напряжения и сопротивления Rn, но и от величины наводимой в этой обмотке противо-ЭДС:
![]()
При пуске двигателя его якорь неподвижен и противоэлектродвижущая сила равна нулю. В якоре протекает самый большой по величине ток, который в десять и более раз превышает нормальный рабочий ток двигателя. Поэтому для уменьшения тока, потребляемого двигателем, рабочий ток двигателя. Поэтому для уменьшения тока, потребляемого двигателем, на время пуска последовательно с обмоткой якоря включается сопротивление пускового реостата Rn (рис. 1.37).
Частоту вращения двигателей постоянного тока можно регулировать одним из следующих способов:
а) изменением напряжения сети;
б) изменением падения напряжения в цепи обмотки якоря реостатом, включаемым последовательно с обмоткой якоря;
в) изменением магнитного потока полюсов реостатом Rp, включаемым последовательно с обмоткой возбуждения.
Наибольшее применение нашел третий способ, позволяющий экономично в широких пределах изменять частоту вращения двигателя. Возможность плавного, удобного и экономичного регулирования частоты вращения является важным преимуществом двигателей постоянного тока перед двигателями переменного тока.
В зависимости от способа соединения обмотки возбуждения двигателя с обмоткой якоря различают три типа двигателей постоянного тока: двигатели с параллельным возбуждением, двигатели с последовательным возбуждением и двигатели со смешанным возбуждением.
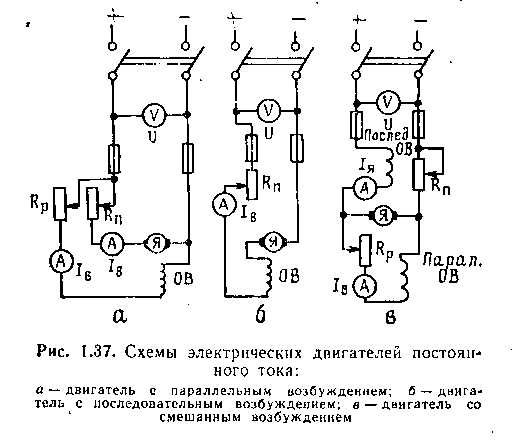
Поскольку обмотка возбуждения подключена к зажимам сети, то независимо от тока в обмотке якоря по обмотке возбуждения протекает постоянный по величине ток, создавая почти постоянный магнитный поток. Поэтому частота вращения двигателя мало зависит от изменений нагрузки на валу, что является большим его достоинством. Двигатели постоянного тока с параллельным возбуждением применяются в тех случаях, где требуется в широких пределах регулировать частоту вращения, а также там, где необходимо, чтобы при всех изменениях нагрузки частота вращения механизма оставалась практически постоянной.
В двигателе с последовательным возбуждением обмотка возбуждения соединена с обмоткой якоря последовательно (рис. 1.37,6). Так как в таком двигателе и по обмотке якоря, и по обмотке возбуждения протекает один и тот же ток, то его магнитный поток изменяется почти пропорционально току в обмотке якоря.
В момент пуска двигателя по обмотке якоря протекает самый большой по величине ток. Этот ток создает в двигателе наибольший магнитный поток, и пусковой момент двигателя в десятки раз превосходит нормальный рабочий вращающий момент. Большой пусковой момент является основным достоинством двигателя с последовательным возбуждением. Он позволяет использовать такие двигатели в тех случаях, когда необходимо брать с места большую нагрузку, например в качестве стартеров двигателей станций электропитания РЛС.
Недостатком двигателя с последовательным возбуждением является то, что его частота вращения очень сильно зависит от нагрузки. При холостом ходе двигателя он потребляет наименьший ток, создавая очень малый магнитный поток полюсов. При этом за счет резкого уменьшения противоэлектродвижущей силы происходит скачкообразное увеличение тока в якоре, вращающего момента, а значит, и частоты вращения. Частота вращения может настолько возрасти, что станет опасной для механической прочности двигателя (двигатель может пойти «вразнос»). Поэтому двигатели с последовательным возбуждением устанавливаются на таких объектах, где исключена возможность их работы вхолостую.
В двигателе со смешанным возбуждением (рис. 1.37, б) одна обмотка возбуждения подключается к обмотке якоря параллельно, а другая — последовательно. Обмотки включены так, что их магнитные потоки складываются, причем одна обмотка является основной и создает около 75% общего магнитного потока, а другая — вспомогательной. Если основной обмоткой является параллельная, то двигатель по своим свойствам приближается к двигателю с параллельным возбуждением, но за счет небольшой последовательной обмотки имеет больший пусковой вращающий момент.
КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Как устроен двигатель с короткозамкнутым ротором?
2. Объяснить принцип работы асинхронного двигателя с короткозамкнутым контуром?
3. Как устроен генератор трёхфазного переменного тока?
4. Объяснить принцип работы генератора постоянного тока.
5. Каким образом можно изменить направление вращения якоря электродвигателя постоянного тока? Как можно изменять частоту вращения?
6. В каких случаях на практике применяются электродвигатели с параллельным и последовательным возбуждением.