

1.6 Трансформаторы
Трансформатором называется устройство, предназначенное для преобразования напряжения переменного тока одной величины в напряжение переменного тока другой величины.
Простейший трансформатор изображен на рис. 1.30, а и состоит из замкнутого сердечника, набранного из отдельных, изолированных друг от друга листов трансформаторной стали. На сердечнике размещаются обмотки. Обмотка, которая подключается к источнику переменного тока, называется первичной. Обмотки, к которым присоединяют потребителей, называются вторичными.
Переменный ток, протекая по первичной обмотке, создает в сердечнике магнитный поток Ф. Магнитный поток пронизывает все обмотки одновременно и в каждой из них индуктирует переменную ЭДС, величина которой пропорциональна Числу витков в обмотке. Чем больше витков в обмотке, тем больше ЭДС:
где Е1 — ЭДС первичной обмотки (ЭДС самоиндукции);
Е2 — ЭДС вторичной обмотки (ЭДС взаимоиндукции);
w1 и w 2 — число витков в первичной и вторичной обмотках.

Пренебрегая падением напряжения внутри обмоток, можно считать, что при отключенной нагрузке (холостом ходе) индуктируемые ЭДС в обмотках равны напряжениям, действующим на первичной и вторичной обмотках:
![]()
где U1 и U2 — напряжения на первичной и вторичной обмотках.
Следовательно, напряжение на вторичной обмотке тем больше, чем больше она имеет число витков.
Отношение напряжения на зажимах первичной обмотки к напряжение на вторичной обмотке называется коэффициентом трансформации К:
Трансформатор называется понижающим, если напряжение на вторичной обмотке меньше, чем напряжение на первичной обмотке (К>1).
Трансформатор называется повышающим, если напряжение на вторичной обмотке больше, чем напряжение на первичной обмотке (К<1).
При подключении потребителя по вторичной обмотке потечет ток I2, который создает магнитный поток, направленный на встречу магнитному потоку первичной обмотки. Поток первичной обмотки уменьшается, это вызывает уменьшение в ней ЭДС самоиндукции E1, в результате чего в первичной обмотке увеличивается ток I1. Увеличение тока I1 происходит до тех пор, пока магнитный поток первичной обмотки трансформатора не станет прежним.
Таким образом, с увеличением тока вторичной обмотки растёт ток первичной обмотки, а при уменьшении тока во вторичной обмотке ток первичной обмотки уменьшается.
Если не учитывать потери в обмотках трансформатора, то можно считать мощности первичной и вторичной обмоток одинаковыми:
![]()
КОНТРОЛЬНЫЕ ВОПРОСЫ
Объяснить принцип работы трансформатора.
Как устроен трансформатор?
Что называется коэффициентом трансформации?
1.7 Электрические машины
1.7.1Асинхронный двигатель
Асинхронным двигателем называется машина, преобразующая электрическую энергию переменного тока в механическою торой скорость вращения ротора зависит от нагрузки Асинхронные двигатели бывают трехфазные, двухфазные и однофазные Конструкция трехфазных асинхронных двигателей, разработанная русским инженером Доливо-Добровольским М. О в 1896г. С небольшими усовершенствованиями сохранилась до настоящего времени.
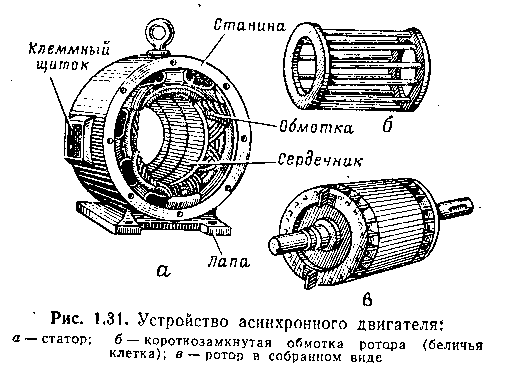
Асинхронный двигатель состоит из двух основных частей: статора и ротора. Статор является неподвижной частью двигателя (рис. 1.31, а), С внутренней стороны статора сделаны пазы, куда укладываются фазные обмотки.
У трехфазного асинхронного двигателя три обмотки. Они выполнены одинаково и размещаются под углом 120°. По обмоткам протекает трехфазный ток, который создает магнитное поле, вращающееся с частотой
![]()
где п — число оборотов, об/мин;
f1 — частота переменного тока, Гц;
р — число пар полюсов.
Ротор — вращающаяся часть двигателя. Он может быть короткозамкнутым и фазным. В двигателях с короткозамкнутым ротором обмотка выполнена в виде медных или литых алюминиевых стержней, замкнутых по торцам между собой (рис. 1.31, б,в)
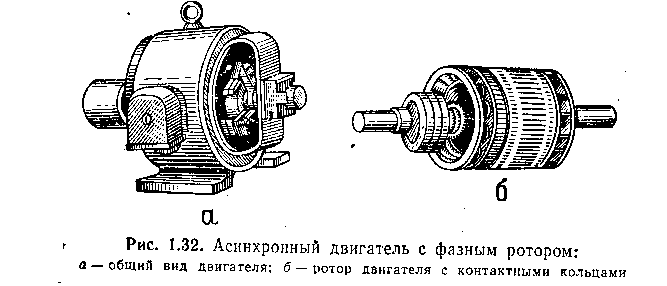
В двигателях с фазным ротором последний имеет фазные обмотки (рис. 1.32, а, б). Они выполняются по типу обмоток статора и имеют такое же число фаз. Обмотки соединяются «звездой», т. е. концы их соединены в одну точку, а начала подсоединяются к медным кольцам, закрепленным на валу. У таких двигателей- есть приспособление, дающее возможность либо включать роторную обмотку последовательно с реостатом во время пуска, либо замыкать ее накоротко во время работы. '
Для уменьшения потерь на вихревые токи статоры и роторы асинхронных двигателей набираются из отдельных изолированных друг от друга листов электротехнической стали толщиной 0,5 мм.
Если подключить статорные обмотки двигателя к сети трехфазного переменного тока, то внутри статора возникает вращающееся магнитное поле. Это поле пересекает одновременно обмотки статора и ротора. В статорных обмотках индуктируются противоэлектродвижущие силы, определяющие величину токов обмоток.
В роторных обмотках индуктируются ЭДС, под действием которых в обмотках протекают токи. Токи обмоток ротора, взаимодействуя с вращающимся магнитным полем статора, создают вращающий момент, в результате которого ротор начинает вращаться в сторону вращения поля статора.
Если предположить, что ротор вращается с такой же скоростью, с какой вращается магнитное поле, то токи в обмотках ротора исчезнут. Исчезновение токов приведет к тому, что ротор начнет вращаться медленнее, чем поле статора. При этом поле статора начнет пересекать обмотки ротора и на него вновь будет воздействовать вращающий момент.
Следовательно, ротор при своем вращении всегда должен иметь частоту вращения меньшую, чем частота вращения поля статора. Отсюда двигатель получил название асинхронного (неодновременного). Разница между частотой вращения поля статора п и частотой вращения ротора ti\ характеризуется величиной S, называемой скольжением:

Для асинхронного двигателя скольжение изменяется от единицы до величины, близкой к нулю.
Во время пуска двигателя, когда ротор еще неподвижен (скольжение S=1), частота пересечения обмоток ротора вращающимся магнитным полем наибольшая. В обмотках ротора индуктируются наибольшие ЭДС, которые вызывают большой ток. Токи обмоток ротора создают свое вращающееся магнитное поле, направленное навстречу вращающемуся магнитному полю статора и уменьшают его. В результате уменьшается противоэлектродвижущая сила, токи в обмотках статора растут. Пусковой ток превышает номинальный в 4—7 раз.
Для уменьшения пускового тока обмотки статора на время пуска соединяют «звездой». Как только ротор двигателя разовьет номинальную скорость и ток статорных обмоток станет номинальным, обмотки статора переключают со «звезды» на «треугольник».
Частота вращения ротора двигателя с фазным ротором регулируется реостатом, включенным в обмотки ротора. Изменяя сопротивление реостата, изменяется ток в роторе, при этом изменяется поле ротора, соответственно изменяется сила взаимодействия полей ротора и статора. Таким образом, изменяется величина скольжения.
Частота вращения ротора двигателей с короткозамкнутым ротором регулируется либо переключением числа пар полюсов, либо изменением подводимого напряжения.
В радиолокационных станциях трехфазные асинхронные двигатели применяются для вращения антенн, вентиляторов, моторных реле времени и т. д.
Широко применяются в следящих системах РЛС двухфазные асинхронные двигатели. Очи отличаются от трехфазных тем, что на статоре имеются две обмотки, сдвинутые в пространстве на угол 90°. По каждой из этих обмоток .протекает однофазный ток со сдвигом по фазе, равным 90°. Такая система сдвига токов в пространстве и по фазе создает вращающееся магнитное поле.
Ротор двухфазных двигателей короткозамкнутый.