

2.1.7. Принципы оптимальной обработки некогерентных сигналов
Некогерентными называются сигналы, фазовую структуру которых нельзя считать закономерной. Такого вида сигналы часто встречаются в обзорных радиолокаторах. В силу случайности начальных фаз, когерентное накопление возможно лишь в пределах каждого из одиночных радиоимпульсов. Накопление же от импульса к импульсу может быть только последовательным - некогерентным.
Частное отношение правдоподобия представляет собой произведение двух степенных функций: степенной функции полного корреляционного интеграла Z и степенной функции полной энергии Э пачки
![]() ,
,
![]() ,
,
где
![]() - модульное значение частного
корреляционного интеграла, вычислен-
- модульное значение частного
корреляционного интеграла, вычислен-
ное
для случая, когда ожидаемым сигналом
является г-й радиоимпульс;
![]() -
амплитудные множители, тождественно
равные единице при не-
-
амплитудные множители, тождественно
равные единице при не-
флюктуирующей пачке.
Для некогерентных пачек отношение правдоподобия представляет собой произведение отношений правдоподобия для одиночных радиоимпульсов соответствующего вида, т.е. со случайной начальной фазой или случайными амплитудой и начальной фазой


Сравнение значений отношений правдоподобия / с порогом /0 может быть заменено сравнением со своими порогами значений In/. Для рассматриваемых случаев
![]() , (28)
, (28)
![]() .
(29)
.
(29)
Оптимальные обнаружители, построенные в соответствии с соотношениями (28) и (29), вычисляют модульные значения корреляционных интегралов и суммируют в общем случае нелинейные функции этих модульных значений.
Для
нефлюктуирующих некогерентных пачек
суммирование логарифмов
![]() заменяется суммированием линейных или
квадратичных функций величины
,
а именно, квадратичных, если амплитуды
радиоимпульсов малы по сравнению
с уровнем шума,
заменяется суммированием линейных или
квадратичных функций величины
,
а именно, квадратичных, если амплитуды
радиоимпульсов малы по сравнению
с уровнем шума,
![]()
и линейных, если они велики
![]() .
.
Обычно
комплексные амплитуды всех ожидаемых
импульсов пачки соответствуют
одному и тому же закону модуляции. Они
различаются только: 1) моментами прихода
импульсов
![]() ,
зависящими
от моментов зондирования и дальности,
и 2) неслучайными множителями Si
зависящими
от формы огибающей пачки и угловой
координаты. Поэтому все значения
,
зависящими
от моментов зондирования и дальности,
и 2) неслучайными множителями Si
зависящими
от формы огибающей пачки и угловой
координаты. Поэтому все значения
![]()
пропорциональны
амплитудам некоторых однотипно
получаемых видеоимпульсов
![]() .
Последние могут быть сняты с выхода
единственного канала приема
последовательно во времени. Достаточно,
чтобы этот канал содержал схему
.
Последние могут быть сняты с выхода
единственного канала приема
последовательно во времени. Достаточно,
чтобы этот канал содержал схему
когерентной обработки для ожидаемого сигнала (оптимальный фильтр) и линейный детектор. Чтобы получить квадраты амплитуд Z\{ линейный детектор заменяется квадратичным. Рассмотренный канал приема не учитывает форму огибающей пачки радиоимпульсов и не обеспечивает последетекторное суммирование. Указанные операции реализуются в следующей схеме оптимальной обработки (рис. 2.13).
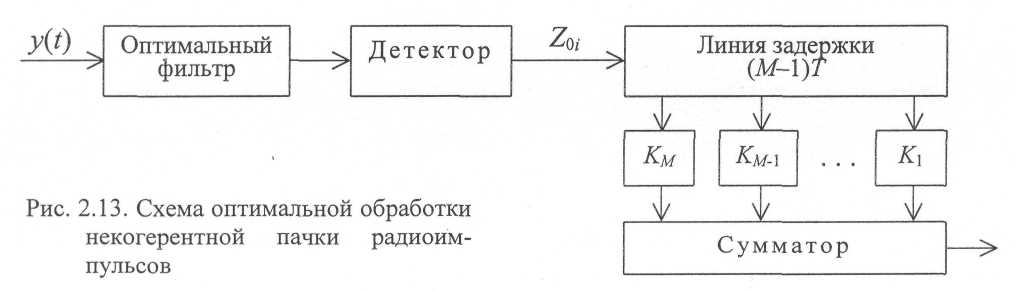
В
случае слабой нефлюктуирующей пачки,
когда оптимален квадратичный
детектор, последовательное суммирование
импульсов производится с весовыми
коэффициентами
![]() .
В
случае нефлюктуирующей пачки импульсов
большой амплитуды оптимален линейный
детектор и последовательное суммирование
производится с весовыми коэффициентами
Ki
=Si
. В
случае флюктуирующей
пачки оптимален квадратичный детектор
и последовательное суммирование
производится с весовыми коэффициентами:
.
В
случае нефлюктуирующей пачки импульсов
большой амплитуды оптимален линейный
детектор и последовательное суммирование
производится с весовыми коэффициентами
Ki
=Si
. В
случае флюктуирующей
пачки оптимален квадратичный детектор
и последовательное суммирование
производится с весовыми коэффициентами:
 ,
где
,
где
![]() - отношение сигнал-помеха для
- отношение сигнал-помеха для
импульса с весовым множителем единица, средняя энергия которого равна Эо.
При обработке пачки отраженного сигнала определенные трудности возникают при осуществлении задержки, измеряемой длительностью пачки. В этом случае может быть использована одна линия задержки на период посылки, но за счет положительной обратной связи с выхода на вход ее превращают в рециркулятор на видеочастоте (рис. 2.9).
Широкое распространение находят схемы цифрового накопления или, иначе, схемы счета числа импульсов, превышающих порог. С учетом пропуска
отдельных
импульсов из-за флюктуации или наложения
противофазных шумов решение
о наличии цели принимается, если налицо
k
и
более импульсов из т
возможных
(критерий к/т).
Для
каждого т
существует
оптимальное значение
![]() .
Потери цифрового суммирования, по
сравнению с квадратичным, не
превышают ЗдБ.
.
Потери цифрового суммирования, по
сравнению с квадратичным, не
превышают ЗдБ.