

5.6.. Моноимпульсный метод измерения
В моноимпульсной РЛС каждый отраженный импульс от цели несет всю информацию о положении цели, как по угловым координатам, так и по дальности. Выделение информации достигается одновременным сравнением амплитуд и фаз отраженных сигналов, которые принимаются несколькими антенными устройствами.
Моноимпульсные РЛС в основном используются для автоматического сопровождения по угловым координатам, но могут быть и обзорные РЛС. Для автоматического сопровождения в одной плоскости надо два канала, две антенны, а для сопровождения и по азимуту и по углу места - четыре.
Моноимпульсные РЛС более сложны по сравнению с однокананьиыми РЛС, но они позволяют точнее определить координаты. 'Это объясняется тем, что низкочастотные амплитудные флуктуации отраженных сигналим, не оказывают влияния на работу таких систем.
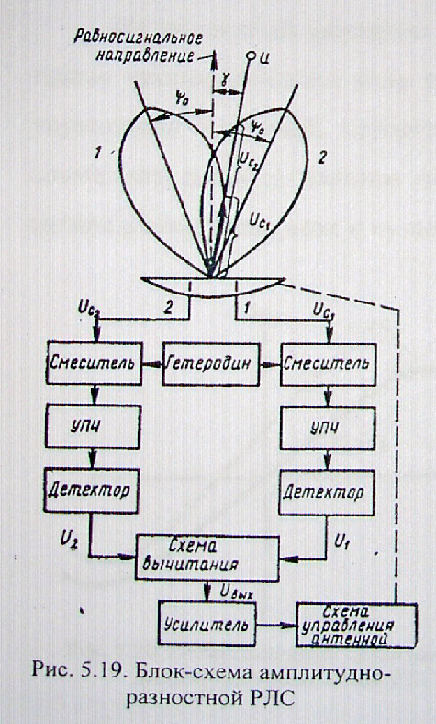
Принцип работы моноимпульсной РЛС рассмотрим на простейшей амплитудно-разностной РЛС (рис. 5.19), в которой для определения направления на цель сравниваются амплитуды сигналов, принимаемых двумя каналами станции (для пеленгации в одной плоскости).
Характеристики направленности антенн каналов образуют равносигнальное направление. Принимаемые каждой из антенн сигналы усиливаются отдельными приемными устройствами, детектируются, и затем находится их разность.
Сигнал, принимаемый антенной 1, на входе приемника имеет вид,
![]()
где к – коэффициент
пропорциональности;
F(β) - характеристика направленности антенн:
![]()
ψ0 - угол отклонения максимума характеристики направленности от равносигнального направления;
γ - угол отклонения равносигнального направления от направления на цель (угол рассогласования);
ω - частота сигнала;
φ - фаза.
Сигнал на выходе второй антенны
![]()
После преобразования, усиления по промежуточной частоте и линейного детектирования сигналы в каналах РЛС на входе вычитающего устройства равны соответственно:

где К1 ,К2 - коэффициенты передачи сигнала в каналах.
На выходе схемы вычитания сигнал при малых углах рассогласования равен

Если коэффициенты передачи каналов равны К1=К2=К', то сигнал на выходе равен
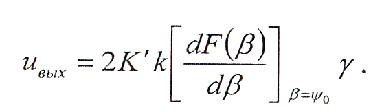
Из последней формулы видно, что сигнал на выходе схемы вычитания прямо пропорционален углу рассогласования. Этот сигнал подается на схему управления антенной, которая поворачивает антенну так, чтобы непрерывно совмещать равносигнальное направление с направлением на цель, т.е. сводит сигнал рассогласования к нулю.
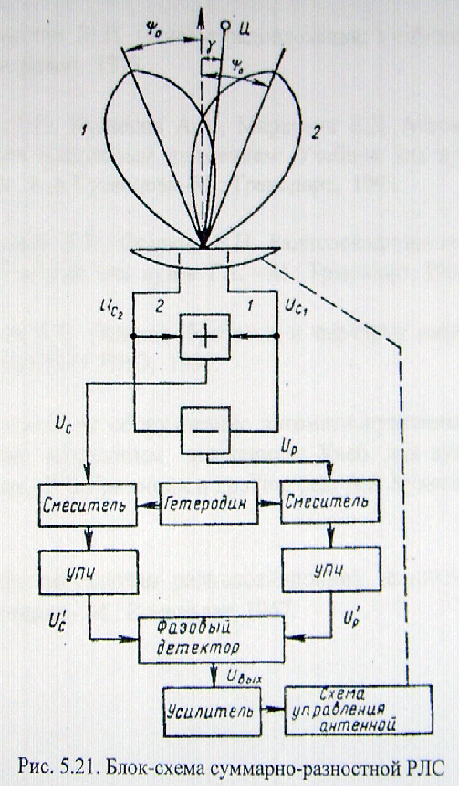
На рис. 5.20 приведены пеленгационные характеристики системы. Недостатком системы является зависимость нулевого значения пеленгационной характеристики от стабильности и равенства друг другу коэффициентов передачи сигналов в отдельных каналах. Этот недостаток отсутствует в амплитудной суммарно-разностной РЛС (рис. 5.21).

Сигнал на выходе такой системы при малых углах рассогласования равен

В этой системе нулевое пеленгационное направление не зависят от амплитудных и фазовых характеристик каналов (ивых=0 при γ=0). Изменение амплитудных (К1, и К2) и фазовых (φ1 и φ2) характеристик каналов приводит только к некоторому изменению крутизны пеленгационной характеристики.
Кроме амплитудных моноимпульсных РЛС, могут быть фазоразностные и фазовые суммарно-разностные РЛС. Отличаются они от выше описанных только тем, что производится сравнение не амплитуд, а фаз.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛЕТИРАТУРЫ
1. Теоретические основы радиолокации. /Под ред.Я.Д.Ширмана М.:Сов.радио, 1970
2. Радиоэлектронные системы: основы построения и теория
Справочник. Ширман Я.Д., Лосев Ю.И., Минервин Н.Н. и др. /Под ред. Я.Д.Ширмана.-М.: ЗАО Маквис, 1998.
3. Лезин Ю.С. Введение в теорию и технику радиотехнических ситем: Учеб. пособие для вузов. - М.: Радио и связь, 1986.
4. Финкельштейн М.И. Основы радиолокации: Учебник для вузов. -М.: Сов. радио, 1973.
5. Анодина Т.Г., Кузнецов А.А., Маркович Е.Д. Автоматизация управления воздушным движением: Учебник для вузов.
/ Под. ред. А.А.Кузнецова.-М.: Транспорт, 1992.
6. Перевезенцев Л.Т., Огарков В.Н. Радиолокационные системы аэробортов: Учебник для вузов ГА. -М.: Транспорт, 1991.
7. Охрименко А.Е. Основы обработки и передачи информации. - Минск: НВИЗРУ ПВО, 1990.
8. Радиолокационное оборудование автоматизированных систем управления воздушным движением: Учеб. для вузов. А.А.Кузнецов, А.И.Козлов, В.В.Криницин и др./Под ред. А.А.Кузнецова-М.:Транспорт, 1995.
9. Справочник по основам радиолокационной техники. / Под ред. В.В.Дружинина.- М.: Воениздат, 1967.