

1.3. Пространственно-временная обработка радиолокационной информации
Обработка радиолокационной информации предполагает объединение не на уровне сигналов, а на уровне первичной информации, т.е. единичных решении о наличии и классе целей и единичных (разовых) оценок координат и параметров движения целей.
Пространственно-временная обработка включает: первичную обработку сигнала, вторичную и третичную обработку информации.
Под первичной обработкой подразумевается обработка принятого сигнала в одном пункте приема за один радиолокационный контакт с целью. Таким образом, такая обработка ограничена по пространству и по времени. Пространство ограничено размерами антенной системы (единицы метров), а время - временем наблюдения (единицы - десятки миллисекунд). При этом с определенным качеством (вероятностями правильных и ложных решений, ошибками измерения) могут решаться все задачи радиолокационного наблюдения (обнаружение, измерение, распознавание). Такую обработку сигнала принято называть первичной, а извлекаемую из принятого сигнала в результате ограниченной по пространству и времени обработки информацию - первичной радиолокационной информацией, подразумевая под ней единичные решения о наличии или отсутствии целей, о классе целей, единичные оценки-замеры координат или параметров движения целей.
Как правило, в каждом пункте наблюдения к цели обращаются не один раз, а многократно. Если первичную информацию о целях объединить во времени за несколько циклов обращения к цели, то качество радиолокационной информации улучшится. Процесс объединения во времени первичной радиолокационной информации принято называть вторичной обработкой радиолокационной информации. В результате объединения во времени единичных решений о наличии или отсутствии цели в том или ином элементе разрешения пространства наблюдения улучшаются характеристики обнаружения, а в результате объединения во времени единичных решений о классе цели улучшаются характеристики распознавания. Объединением во времени единичных оценок-замеров координат и параметров движения цели уменьшаются ошибки измерения. Вторичная обработка позволяет уменьшить влияние естественных и искусственных помех, расширить объем получаемой информации путем вычисления скорости и курса объектов или его траектории. Способы объединения во времени первичной информации и его характеристики составляют содержание проблемы вторичной обработки радиолокационной информации.
Если радиолокационная система состоит из нескольких пунктов наблюдения (приема), то первичную информацию о целях можно объединить не только по времени, но и по пространству. При этом качество радиолокационной информации улучшится. Процесс объединения по пространству первичной (или вторичной) информации о целях принято называть третичной обработкой радиолокационной информации. Третичная обработка тоже приводит к улучшению характеристик обнаружения, распознавания и измерения.
Следует отметить, что первичная обработка сигнала (из одного пункта за время наблюдения) в сочетании с вторичной и третичной обработкой информации не эквивалентна полной пространственно-временной обработке сигнала. Дело в том, что вторичная и третичная обработка первичной РЛИ заранее предопределяет некогерентное пространственно-временное объединение результатов первичной обработки. Типичными примерами такого объединения являются АСУ воздушным движением ГА, основу которых составляют группировки некогерентных по времени и по пространству РЛС.
Однако в общем случае при многопозиционном построении радиолокационной системы с взаимной привязкой (позиций) не только по времени, но и по частоте и по фазе результаты первичной обработки сигналов, разделенные по времени и пространству, могут иметь корреляционные связи, которые должны быть использованы при полной пространственно-временной обработке сигнала.
На рис. 1.10 изображена классификация пространственно-временной обработки информации.

1.4. Физический смысл пространственно-временной обработки сигналов на фоне помех в адаптивных антенных решетках
Реализация адаптивных методов в радиолокации стала возможной в связи с появлением и интенсивным развитием антенных решеток. Чтобы правильно понимать и оценивать возможности таких адаптивных РЛС, необходимо рассмотреть особенности обработки сигналов в антенных решетках и формирование ими диаграмм направленности.
На
рис. 1.11, а
изображена
диаграмма направленности (ДН) решетки,
содержащей
8 элементов в полярных координатах. Она
формируется в результате весового
суммирования напряжений отдельных
элементов решетки на частоте
![]() .
Если
теперь обеспечить задержку во времени
выходных сигналов от отдельных
элементов, как это показано на рис. 1.11,
б, то в результате главный лепесток
ДН повернется на угол
.
Если
теперь обеспечить задержку во времени
выходных сигналов от отдельных
элементов, как это показано на рис. 1.11,
б, то в результате главный лепесток
ДН повернется на угол
![]() ,
где с—скорость распространения
сигналов в среде, d
—
расстояние между элементами антенной
решетки,
,
где с—скорость распространения
сигналов в среде, d
—
расстояние между элементами антенной
решетки,
![]() — относительный
сдвиг фазы между соседними элементами
решетки.
— относительный
сдвиг фазы между соседними элементами
решетки.
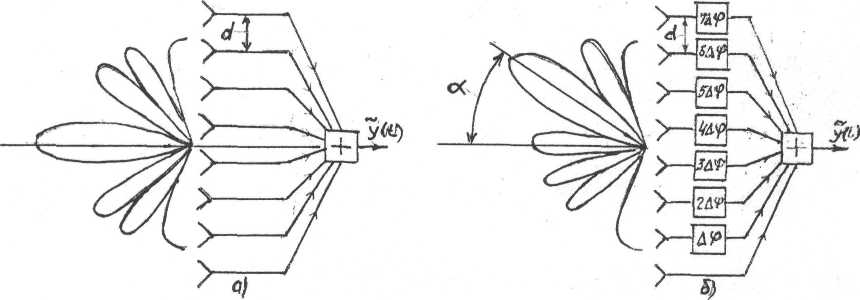
Рис. 1.11. Диаграммы направленности 8-элементной антенной решетки:
а — исходная, б — для приема сигналов при отклонении ДН от нормали к плоскости решетки
Изменяя величины задержки выходных сигналов во времени от отдельных элементов, можно обеспечить электрическое управление главным лепестком ДН в заданном угловом секторе.
Отношение сигнал-шум на выходе антенной решетки уменьшается при попадании на ее элементы мешающих сигналов по главному и боковым лепесткам. Отношение сигнал-шум падает также из-за изменения пространственных положений источников помех во времени, неудачного расположения антенной системы, а также из-за движения луча. Сказанное иллюстрирует рис. 1.12, а, где показана та же антенная решетка, что и на

 Помехи
\
Помехи
\
Помела \
Рис. 1.12. Диаграмма направленности 8-элементной антенной решетки при воздействии
одного источника помехи:
а — исходная, б — с нулем, сформированным в направлении на источник помехи
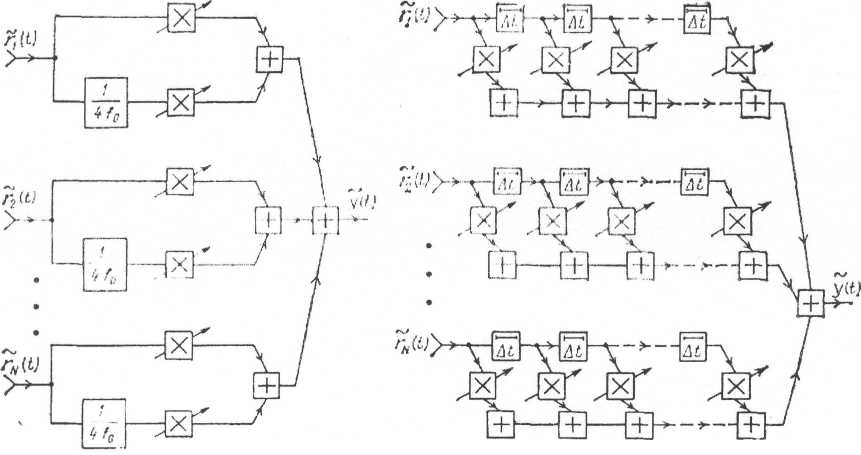
рис. 1.11, а, но с направления, указанного пунктиром поступает помеховый сигнал с частотой . Он принимается по одному из боковых лепестков ДН. И если его мощность достаточно велика, то мощность помех на выходе решетки может оказаться сравнимой или даже существенно больше мощности полезного сигнала. Это может привести к потере работоспособности РЛС с такой антенной системой, если не будут приняты специальные меры. Они могут заключаться в том, например, чтобы выставить весовые коэффициенты решетки так, как указано на рис. 1.12, б. При этом ДН решетки на частоте изменится следующим образом. Боковой лепесток, максимум которого ранее совпадал с направлением на источник помехи, сместится так, что направление нулевого приема совпадет с направлением на источник помехи. Главный лепесток ДН изменится при этом незначительно. Таким образом, будет существенно снижена чувствительность решетки по отношению к сигналу и помехе. Можно подобрать значения весовых коэффициентов решетки так, чтобы образовать зоны нулевого приема в направлениях на несколько источников помех. Но для этого необходимо заранее знать их угловые положения. В реальных условиях такой информации обычно нет, поэтому стремятся построить адаптивные системы, которые автоматически выставляют нули в направлениях воздействия источников помех. Прежде чем перейти к описанию такого рода систем, которые получили название адаптивных антенных решеток, кратко рассмотрим их различные схемы построения. По своей структуре все адаптивные антенные решетки представляют собой весовые сумматоры (рис. 1.13). В фильтре, предназначенном для обработки узкополосных процессов (рис. 1.13, а), каждый элемент решетки соединен с переменным весовым умножителем и с фазовращателем (на 90°). К его выходу подключен второй умножитель. Сигналы с выходов умножителей суммируются. Такая решетка обеспечивает линейную обработку узкополосных процессов. Если необходимо обрабатывать помехи и сигналы в широком диапазоне частот, то все фазовращатели необходимо заменить линиями задержки с отводами.
а) 0
Рис. 1.13. Виды адаптивных антенных решеток без цепей автоподстройки весовых коэффициентов для приема узкополосных сигналов (а) и для приема широкополосных сигналов или не разделяющейся обработки (б)
К каждому отводу подключается свой весовой умножитель. Если расстояние между отводами достаточно мало, то такая схема приближается к идеальному фильтру, который мог бы обеспечить управление фазой и величиной сигнала на каждой из частот заданного диапазона. Сигналы с выходов весовых умножителей суммируются для получения выходного напряжения решетки. Этот вариант схемы решетки представлен на рис. 1.13, б. В такой системе удается сформировать нули ДН в направлениях на источники помех на каждой из частот заданного диапазона.