

2.5.5. Радиолокаторы с внешней когерентностью
Применение СДЦ с внутренней когерентностью затрудняется по мере расширения спектра доплеровских частот пассивных помех. Такое расширение вызывается двумя обстоятельствами; увеличением верхней границы зоны обнаружения РЛС и укорочением длины волны. В сантиметровом диапазоне волн спектр доплеровских частот может достигать такой величины, что в СДЦ с внутренней когерентностью подавить пассивную помеху весьма трудно. В этом случае используют системы СДЦ с внешней когерентностью.
Принцип работы систем с внешней когерентностью аналогичен системам с внутренней когерентностью. Отличие состоит в том, что когерентный гетеродин фазируется не зондирующим сигналом, а сигналом пассивной помехи, или же сама пассивная помеха используется в качестве источника опорного напряжения. Известно несколько разновидностей метода внешней когерентности.
На рис. 2.306 изображена схема и эпюры, поясняющие возможность не-когерентной компенсации пассивных помех

Принцип работы заключается в следующем .Сигналы от усилителя промежуточной частоты (УПЧ) с большим динамическим диапазоном (например, логарифмическою) поступают на обычный детектор (Д), за которым следует схема череспериодного вычитания (ЧПВ), На индикатор с амплитудной отметкой (АИ) подаются сигналы до схемы ЧПВ или после нее. Соответствующие осциллограммы изображены на рис.2,106, б.
До схемы ЧВП наблюдается продетектированная пассивная помеха, сравнительно медленно флюктуирующая вследствие взаимного перемещения отражателей в каждом разрешаемом объеме. Если внутри некоторых разрешаемых объемов имеются быстро перемещающиеся объекты, то имеют место значительно более быстрые флюктуации. После череспериодного вычитания можно обнаружить пульсации цели на фоне остатков помех. Таким образом, с одновременным приходом отраженных сигналов от пассивных помех и целей обыкновенный амплитудный детектор приобретает свойства фазочувствительного детектора. Опорным напряжением оказывается напряжение пассивной помехи. Фаза этого напряжения и фаза отраженного сигнала одинаково зависят от начальной фазы зондирующего импульса, вследствие чего последняя не влияет па разность фаз сигнала и опорного напряжения. Она зависит лишь от радиальной скорости перемещения объекта относительно пассивной помехи и определяется по формуле:

Схема некогерентной компенсации обладает существенным недостатком. Для разрешаемых объемов, в которых отсутствует помеха, имеет место обыч-
ное детектирование и при отсутствии флюктуации сигналы от целей повторяются каждый период и компенсируются в схеме ЧПВ, Следовательно, а зонах, свободных от пассивных помех, цели окажутся потерянными, если не принять специальных мер.
Одной из таких мер может быть следующая. В тракт обработки вводится искусственная линия задержки с регулируемой задержкой сигналов на промежуточной частоте, подключаемую через переключатель К (рис. 2.107).

Пусть в пределах диаграммы направленности антенны РЛС одновременно находятся цель, движущаяся с радиальной скоростью up и практически неподвижный объект (облако). Сигнал от неподвижного объекта может быть использован для выделения доплеровской частоты сигнала цели. На рисунке цель и облако находятся на различных дальностях и их сигналы в приемнике не
с![]() овпадают
во времени. Если в тракте усиления по
промежуточной частоте имеется
линия задержки на время
то задержанный сигнал цели
совпадает
с сигналом от облака. В УПЧ2 возникнут
биения двух сигналов, в результате
чего образуется амплитудная модуляция
результирующего колебания допплеровской
частоты. На выходе детектора ее можно
отфильтровать и измерить.
овпадают
во времени. Если в тракте усиления по
промежуточной частоте имеется
линия задержки на время
то задержанный сигнал цели
совпадает
с сигналом от облака. В УПЧ2 возникнут
биения двух сигналов, в результате
чего образуется амплитудная модуляция
результирующего колебания допплеровской
частоты. На выходе детектора ее можно
отфильтровать и измерить.
Еще одно видоизменение по сравнению с первоначальным вариантом заключается во введении быстродействующего устройства анализа помехи и коммутатора выходного напряжения. При отсутствии помехи на индикатор подается напряжение не с выхода схемы ЧВП, а непосредственно с детектора. Наличие или отсутствие помехи определяется по превышению установленного порога в течение определенного времени. Эффективность коммутации возрастает, если напряжение на детектор подать через небольшую линию задержки, а на анализатор помехи - без задержки. Одним из методов учета свойств помехи является использование корреляционных обратных связей, что позволяет не только компенсировать помеху, но и накапливать полезный сигнал.
Следует обратить внимание на то, что при фазировании когерентного гетеродина помеховыми сигналами они задерживаются на время, равное или несколько большее длительности импульса РЛС, с тем, чтобы предотвратить компенсацию полезных сигналов от целей, летящих в облаке помех.
К достоинствам систем СДЦ с внешней когерентностью можно отнести следующее. Фазирующий импульс помехи проходит те же элементы приемного тракта (от антенны до фазового детектора), что и обрабатываемый сигнал. Следовательно, медленные фазовые нестабильности элементов приемного тракта (УВЧ, смесителя, тракта промежуточной частоты) оказывают одинаковое влияние на фазу опорного напряжения и фазу обрабатываемого сигнала и, следовательно, взаимно компенсируются.
Еще один вариант системы СДЦ с внешней когерентностью предусматривает фазирование когерентного гетеродина помеховыми сигналами. Структурная схема такого устройства изображена на рис.2.108.
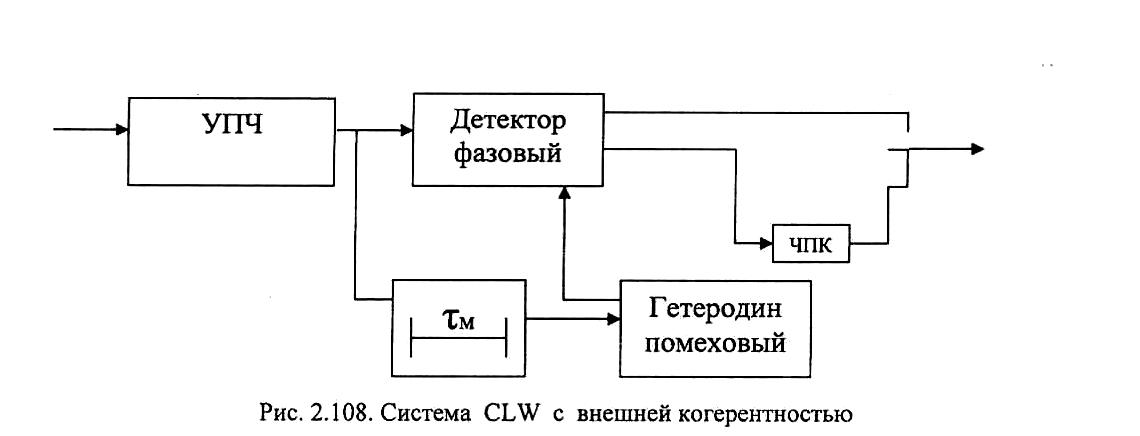
Сравнение принятых колебаний с опорными происходит на фазовом детекторе. Чтобы исключить потерю сигнала при отсутствии помехи в схеме применяют устройство анализа помехи и переключатель, который в отсутствии помехи подключает выход фазового детектора непосредственно к индикатору.
Недостатком схем с внешней когерентностью является расширение спектра помех вследствие нелинейного преобразования колебаний в детекторе. Поэтому качество подавления помех может быть хуже, чем для метода внутренней когерентности.
 Принцип
работы радиолокатора рассмотрим на
примере схемы, изображенной
на рис. 2.109.
Принцип
работы радиолокатора рассмотрим на
примере схемы, изображенной
на рис. 2.109.
Стабильный задающий генератор формирует непрерывные колебания несущей частоты (/о), которые являются опорными для фазового детектора. Импульсный модулятор обеспечивает включение усилителя мощности на время излучения импульсов (ти). Усилитель мощности с линейной фазово-частотной характеристикой усиливает колебания несущей частоты до необходимой мощности, которые через антенный переключатель и антенну излучаются в пространство. Отраженный от цели сигнал принимается антенной, усиливается в усилителе высокой частоты и подается на фазовый детектор.
Когерентность сигнала обеспечивается тем, что для формирования зондирующих и опорных колебаний используется один и тот же задающий генератор непрерывных колебаний. В фазовом детекторе осуществляется сравнение начальных фаз приходящих радиоимпульсов с фазой опорного колебания.
Если
сигнал отражается от неподвижного
объекта, то начальные фазы всех
отраженных радиоимпульсов![]() будут
одинаковы
будут
одинаковы

где До - расстояние до объекта.
Напряжение на выходе фазового детектора будет представлять собой видеоимпульсы одинаковой амплитуды и полярности, определяемыми дальностью до цели.
![]()

Необходимо заметить, что пассивные помехи, в общем случае не являются неподвижными (кроме «местных» предметов), а перемещаются со скоростью
ветра![]() что
приводит к пульсации помехи на выходе
фазового детектора.
что
приводит к пульсации помехи на выходе
фазового детектора.
Для компенсации пульсаций необходимо частоту опорного сигнала изменять на величину

где![]() -
изменение сдвига фаз за время периода
следования Т.
-
изменение сдвига фаз за время периода
следования Т.
Однако
частота опорного сигнала
![]() и
даже промежуточная час
тота
и
даже промежуточная час
тота
![]() ,
поэтому в схемах РЛС смещение частот
обычно реализуют
,
поэтому в схемах РЛС смещение частот
обычно реализуют
путем двукратного преобразования частоты. Кроме того компенсацию скорости ветра производят лишь в определенных участках пространства, для чего реализуется стробирование по дальности и угловой координате.
Известны и другие способы компенсации скорости ветра:
- использование систем обработки с внешней когерентностью;
- переход к более длинным волнам (метровый диапазон);
- двухчастотный метод работы РЛС;
- использование схем ЧПК на видеочастоте.