

2.2.7. Многоканальные (моноимпулъсные) методы измерения угловых координат
Получившие широкое распространение одноканальные методы пеленгации, отличаясь сравнительной простотой, не всегда обеспечивают достаточную точность измерения. Основной причиной являются искажения огибающей пачки отраженных импульсов за счет флюктуации вторичного излучения. Этот недостаток одноканальных методов устраняется при переходе к многоканальным. При этом для измерения каждой угловой координаты используется несколько самостоятельных приемных каналов, чаще всего два.
Многоканальные методы и системы пеленгации делят на амплитудные и фазовые. В них используются зависимости амплитуд или фаз принимаемых колебаний от направления прихода радиоволн, неодинаковые для различных каналов приема.

Рис. 2. 56. Блок-схема двухканального
амплитудного пеленгатора
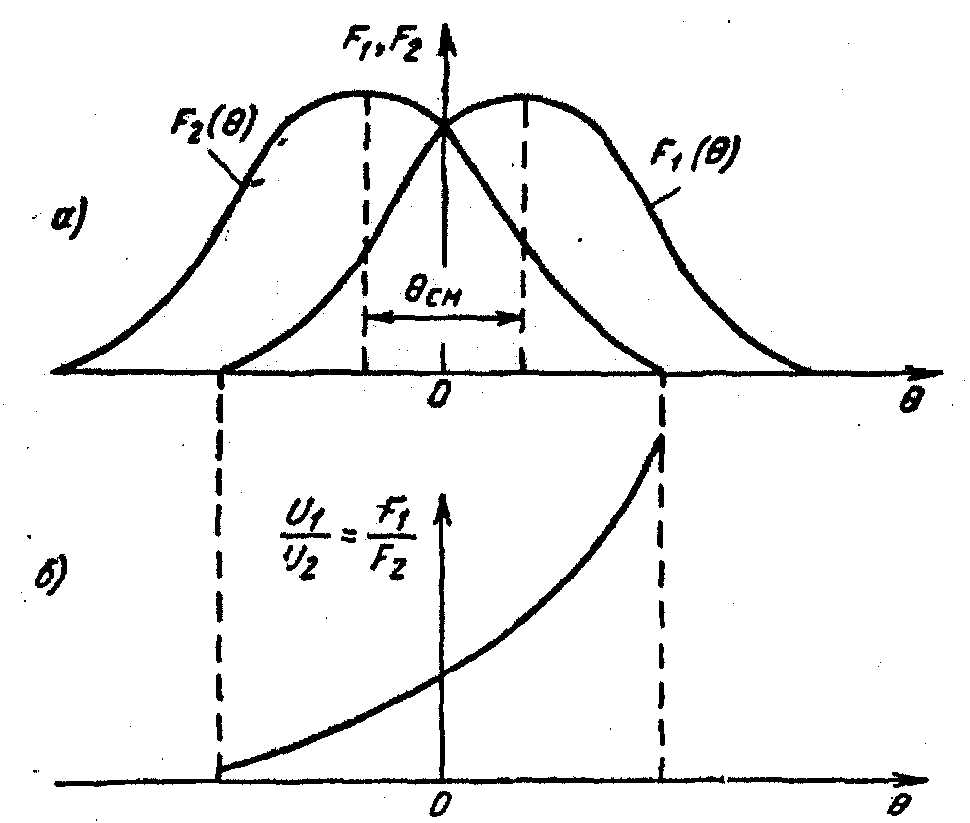
Рис. 2.57. Диаграммы направленности (а) и
зависимость отношения амплитуд от
углового положения цели (б)

Рис. 2.58. Пеленгатор с логарифмическими
усилителями (а) и пеленгационная
характеристика (б)
На
рис. 2.56 представлена простейшая
двухканальная амплитудная
система
пеленгации. На приемные каналы поступают
колебания от сдвинутых из фокуса зеркала
антенны облучателей. Различным каналам
соответствуют смещенные на некоторый
угол 0см диаграммы направленности.
Продетектированные импульсы с выхода
приемников первого и второго каналов
поступают на схему сравнения амплитуд,
которая определяет их отношение. График
зависимости отношения амплитуд от
положения цели относительно оси антенной
системы
![]() для
смещенных диаграмм направленности
каналов F1(θ)
и F2(θ)
показан на рис. 2.57. В соответствии с этим
графиком по величине отношения
амплитуд может быть найдено смещение
цели θ относительно равносигнального
направления (U1/U2=l).
Угловая координата цели θЦ
= θ + θ0
определяется при этом алгебраической
суммой измеренной величины θ и угла
поворота антенны θ0,
который вводится в счетно-решающее
устройство.
для
смещенных диаграмм направленности
каналов F1(θ)
и F2(θ)
показан на рис. 2.57. В соответствии с этим
графиком по величине отношения
амплитуд может быть найдено смещение
цели θ относительно равносигнального
направления (U1/U2=l).
Угловая координата цели θЦ
= θ + θ0
определяется при этом алгебраической
суммой измеренной величины θ и угла
поворота антенны θ0,
который вводится в счетно-решающее
устройство.
В отличие от одноканального амплитудный двухканальный метод позволяет измерять угловую координату по одному принятому импульсу и вместе с другими многоканальными методами (применительно к случаю импульсного зондирования пространства) относится к классу моноимпульсных методов пеленгации. Наиболее важным их достоинством является нечувствительность к флюктуациям амплитуд отраженного сигнала, что для схемы рис.2.56 непосредственно вытекает из принципа их сравнения в один и тот же момент времени.
Задача сравнения амплитуд облегчается, если в приемнике используются усилители с логарифмическими амплитудными характеристиками (рис. 2.58, а). Схема сравнения сводится в этом случае к вычитающему устройству, поскольку
![]() .
.
Зависимость полученной величины от угла рассогласования θ (пеленгационная характеристика) показана на рис. 2.58, б. Другой способ сравнения амплитуд связан с использованием автоматической регулировки усиления (АРУ) колебаний промежуточной частоты обоих каналов (рис. 2.59). Если в качестве регулирующего используется одно и то же напряжение, а усилители идентичны, то амплитуды их выходных напряжений Uвых1=kU1 и Uвых2=kU2 пропорциональны амплитудам входных, причем коэффициент пропорциональности (коэффициент усиления k) в обоих случаях одинаков. Пусть регулирующее этот коэффициент напряжение выбирается из условия практического постоянства амплитуды выходного напряжения второго канала Uвых2=c. В этом случае к = c/U2, а амплитуда выходного напряжения первого канала Uвых1 = c(U1/U2) оказывается пропорциональной отношению амплитуд напряжений на входе первого и второго каналов.

Рис. 2.59. Пояснение способа сравнения
амплитуд с использованием автоматической
регулировки усиления
С учетом боковых лепестков диаграмм направленности зависимость U1/U2 = f(θ) или lg(U1/U2) = φ(θ) не всегда является гладкой и монотонной, какой она показана на рис. 2.57. Немонотонность этой зависимости может вести к неоднозначности измерений при U1/U2 » 1 или U1/U2 « 1. Последняя несущественна, если измеряются лишь малые отклонения равносигнального направления от направления на цель (U1/U2 ≈ 1) или если для измерения используются несколько (более двух) приемных каналов.
На рис. 2.60 показана моноимпульсная амплитудная система с рядом парциальных каналов, перекрывающих сектор обзора по одной из угловых координат, например по углу места. Сама антенная система может при этом поворачиваться, например, по другой координате, осуществляя обзор (сканирование). Сканирование может производиться также электрическим путем без перемещения антенной системы. Продетектированные напряжения приемных парциальных каналов поступают на схему сравнения амплитуд. В этой схеме направление на цель грубо определяется по номеру парциального канала, выходной сигнал которого имеет наибольшую амплитуду. Для уточнения и устранения неоднозначности отсчета могут использоваться значения амплитуд соседних каналов.

Рис. 2.60. Принцип пеленгации методом
парциальных диаграмм
Решение об измеренной координате может выдаваться в результате аналоговой или цифровой обработки. В последнем случае значения амплитуд напряжений на выходе канальных приемников квантуются и переводятся в цифровую форму.
Перейдем к рассмотрению фазовых методов многоканальной пеленгации. На рис. 2.61 показана двухканальная фазовая система пеленгации, в которой используется разнос приемных антенн на величину d, называемую базой. Принимаемые колебания приходят в антенны со сдвигом фаз
![]()
где λ —длина волны колебаний передатчика, θ — угол между направлением прихода радиоволн и нормалью к базе.
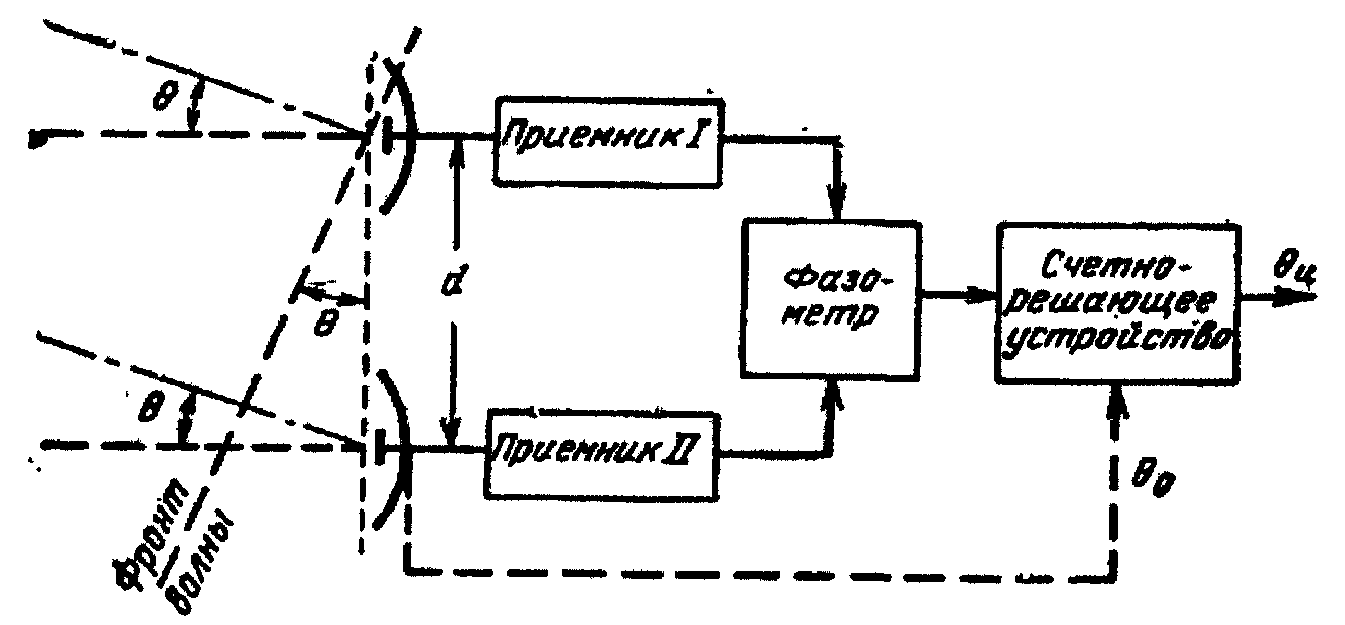
Рис. 2.61. Блок-схема двухканального
фазового пеленгатора
Далее колебания усиливаются приемниками и поступают на фазометр, который измеряет разность фаз φ1—φ2, зависящую от угловой координаты цели. Фазометр может быть проградуирован в единицах углового отклонения цели от нормали к базе θ, так что θц – θ0 + θ.
Как и амплитудная, фазовая система многоканальной пеленгации позволяет определять угловое положение цели по одному принятому импульсу и относится к классу моноимпульсных. Она практически нечувствительна к флюктуациям отраженного сигнала.
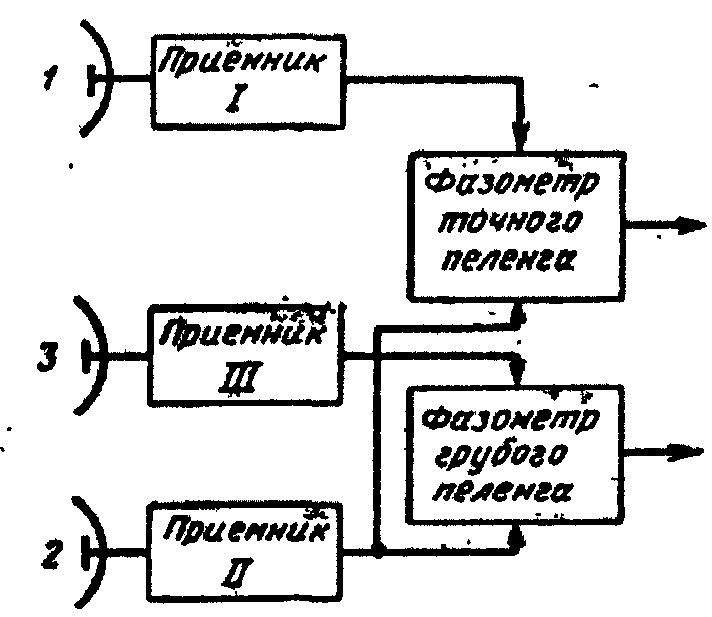
Рис. 2.62. Устранение неоднозначности
пеленга путем применения третьего
канала
Поскольку разность фаз φ1—φ2 определяется с точностью до слагаемого, кратного 2π, возможна неоднозначность отсчета. Неоднозначность устраняется за счет высокой направленности антенн, когда для углов θ в пределах главного лепестка диаграммы направленности разность фаз φ1—φ2 не превышает 2π. Для расширения сектора однозначного отсчета можно ввести третий антенно-приемный канал (рис. 5.66) с уменьшенной базой между ним и одним из двух других каналов. По разности фаз φ1—φ2 сигналов, принятых антеннами 1 и 2, угловая координата цели определяется с высокой точностью, но неоднозначно. Измерив разность фаз φ1—φ2 сигналов, принятых антеннами 2 и 3, можно устранить неоднозначность отсчета, подобно тому, как неоднозначность точного отсчета времени с помощью минутной стрелки устраняется отсчетом с помощью часовой. И в том, и в другом случае мы имеем дело с устранением неоднозначности за счет многошкальных измерений.
Использование суммарно-разностных методов измерения в моноимпульсных системах
Широкое применение в моноимпульсных системах находит суммарно-разностная обработка колебаний, принимаемых различными каналами. При такой обработке образуются сумма и разность двух колебаний. Чтобы облегчить требования к идентичности и динамическому диапазону каналов приема, раздельную обработку принимаемых колебаний заканчивают схемой образования разности в самом начале приемного тракта, на высокой частоте.
Для получения суммарного и разностного колебаний обычно используются высокочастотные мостовые схемы на волноводах, либо на коаксиальных линиях.
На рис.2.63 показана схема кольцевого суммарно-разностного волноводного моста. Принятые сигналы подводятся к отводам моста 1 и 2. С отвода «с» снимается суммарное колебание, а с отвода «р» — разностное. Фаза разностного колебания определяется фазой того из пары входных сигналов, амплитуда которого больше. Вместо кольцевого моста часто используется двойной волноводный тройник.
Суммарно-разностная обработка применяется в моноимпульсных системах, основанных как на сравнении амплитуд, так и на сравнении фаз принимаемых колебаний.
На рис. 2.64 показано подключение суммарно-разностного волноводного моста к антенной системе амплитудной моноимпульсной РЛС, измеряющей одну угловую координату. В этой РЛС имеются два угловых канала с неодинаковыми характеристиками направленности при общем фазовом центре. Рис. 2.65 поясняет образование суммарной и разностной диаграмм.
Колебания передатчика приходят к облучателям антенны синфазными, образуя суммарную диаграмму направленности антенны на излучение Fc(θ) = F1(θ) + F2(θ). Суммарная диаграмма на прием аналогична суммарной диаграмме на излучение. Зависимость разностного напряжения от углового отклонения цели определяется разностной диаграммой направленности Fp(θ) = F2(θ)-F1(θ). При этом в соответствии со знаком углового отклонения цеди от оси системы фазы колебаний суммарного и разностного каналов оказываются либо одинаковыми, либо отличающимися на π, что характеризует сторону углового рассогласования. Амплитуда разностного колебания при малых угловых рассогласованиях пропорциональна величине углового отклонения цели.

Рис. 2.63. Схема кольцевого суммарно-разностного
волноводного моста
Таким образом, разностная диаграмма направленности обладает дискриминаторными свойствами по углу и позволяет определять величину и знак углового рассогласования. Для определения величины и знака рассогласования служит фазовый детектор, в котором в качестве опорного напряжения используется суммарный сигнал. На выходе фазового детектора получаются видеоимпульсы, полярность которых зависит от знака рассогласования. После расширения и усиления эти импульсы используются для привода исполнительного устройства следящей системы, управляющей положением антенной системы.
Для измерения угловых координат амплитудным моноимпульсным методом в двух плоскостях используются две аналогичные системы с общим суммарным каналом.
В фазовых моноимпульсных измерителях имеются угловые каналы с одинаковыми характеристиками направленности, но разнесенными фазовыми центрами (см. рис. 2.61). Для измерения разности фаз мгновенных значений двух колебаний u1(t), u2(t) также широко используется суммарно-разностная обработка. В фазометрах суммарно-разностного типа образуются сумма и разность входных колебаний, амплитуды которых одинаковы:
![]() .
.

Рис. 2.64. Подключение суммарно-разностного
волноводного моста к антенне амплитудной
моноимпульсной РЛС
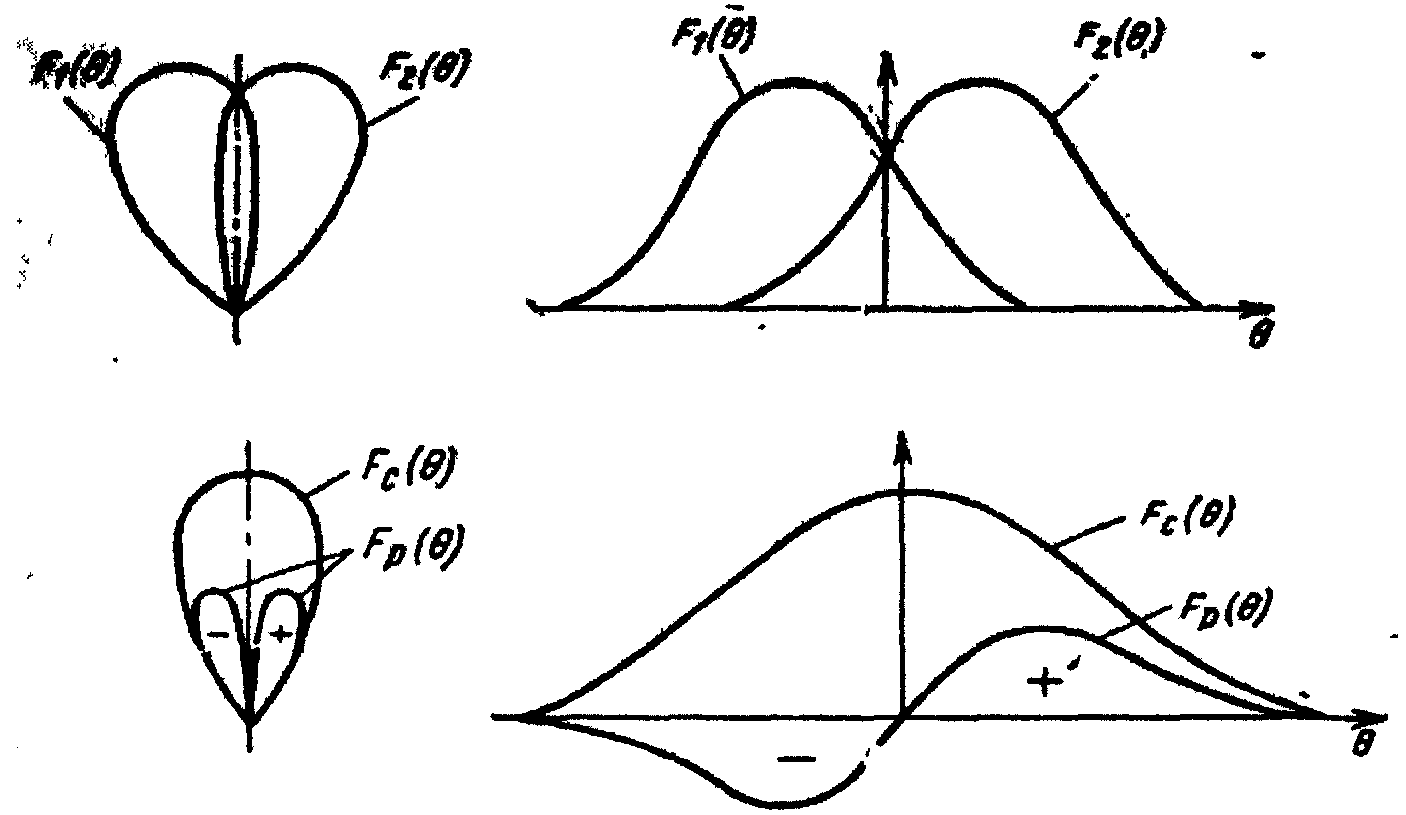
Рис. 2.65. Пояснение образования суммарной
и разностной диаграмм направленности
антенной системы амплитудной
моноимпульсной РЛС
Для суммирования и вычитания можно использовать, например, плечи Н и Е двойного волноводного тройника, если входные сигналы подавать в его боковые плечи. Для этой же цели пригоден волноводно-щелевой мост. Суммарный и разностный сигналы усиливаются разными каналами, но требования к их идентичности ниже, чем при прямом измерении разности фаз.
Отношение амплитуд разностного и суммарного сигналов, которые обозначим здесь U- и U+, зависит только от разности фаз исходных сигналов
 ,
,
что иллюстрируется на градуировочной кривой (рис. 2.66.). Как видно из рисунка, по отношению амплитуд U- / U+ можно определить разность фаз φ1—φ2. Однако интервал однозначного измерения разности фаз составляет в этом случае только π радиан.


Рис. 2.66. Градуировочная кривая фазометра
со схемой деления на видеочастоте
Рис. 2.67. Градуировочная кривая фазометра
со схемой деления на радиочастоте
Интервал однозначного измерения расширяется, если использовать отношение мгновенных значений разностного и суммарного напряжений, пропустив предварительно одно из них через девяностоградусный фазовращатель. Поскольку сравниваемые колебания после этой операции приводятся к одной фазе, получим
![]() ,
,
где индекс ┴ указывает на операцию сдвига фазы на 90°. Из градуировочной кривой (рис. 2.67) следует, что интервал однозначного измерения расширен до 2π.
Отношение амплитуд или же мгновенных значений колебаний может быть визуально измерено с помощью осциллографа, на вертикальные и горизонтальные пластины которого подают продетектированные или недетектированные соответствующие напряжения.
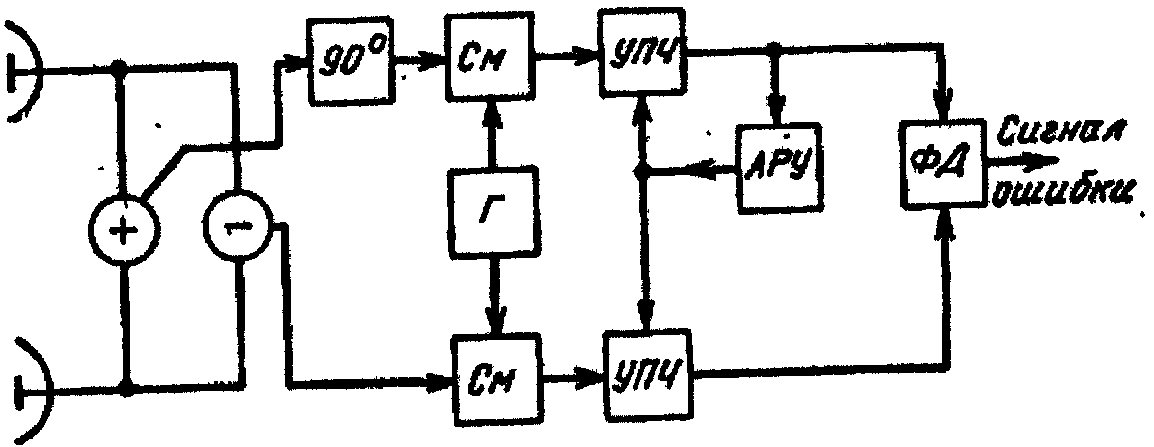
Рис. 2.68. Блок-схема фазового пеленгатора,
использующего для
получения сигнала ошибки углового
рассогласования схемы АРУ
и фазового детектора
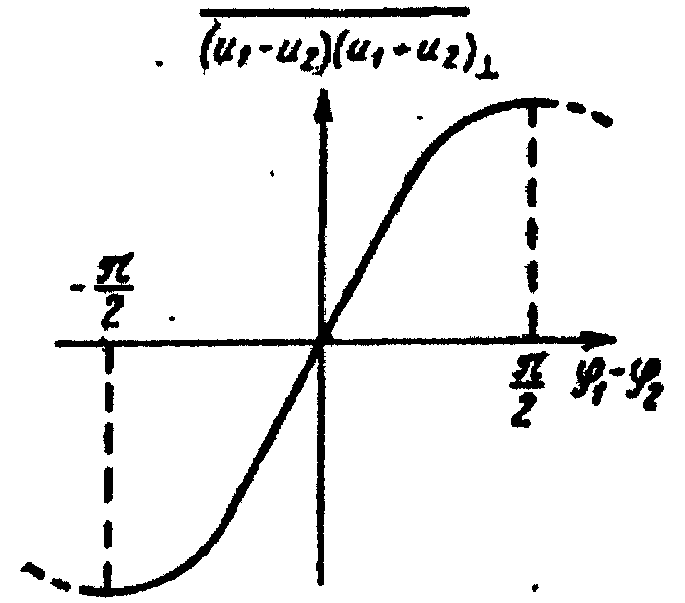
Рис. 2.69. Градуировочная кривая фазометра
со схемой умножения на радиочастоте
(без делящей АРУ)
Изображение на экране имеет вид черты, наклон которой определяется величиной отношения напряжений, а значит, и величиной измеряемой разности фаз.
Автоматизированное деление амплитуд разностного и суммарного сигналов можно осуществить за счет использования соответствующих усилителей с быстрой автоматической регулировкой усиления.
Эффект, аналогичный делению мгновенных значений, можно получить, если после усилителей с автоматической регулировкой усиления поставить общий фазовый детектор, используя в качестве опорного напряжение суммарного, а в качестве основного — напряжение разностного канала (рис. 2.68). Знак напряжения на выходе фазового детектора учитывает при этом знак разности фаз. В самом деле, наряду с операцией деления может быть использована операции умножения и усреднения полученного напряжения во времени:
![]()
Непосредственно
основанный на этом фазометр нуждается,
однако, в нормировке амплитуд U
входных
напряжений за счет использования АРУ
или ограничения; диапазон однозначного
измерения разности фаз составляет при
этом π (рис. 2.69). Если же (рис. 2.68) ввести
единую автоматическую регулировку
усиления и суммарного и разностного
каналов по выходному напряжению
суммарного, то выходной эффект умножителя
будет поделен на
![]() .
Диапазон однозначного измерения разности
фаз увеличится до 2π.
.
Диапазон однозначного измерения разности
фаз увеличится до 2π.
Потенциальные и реальные точности двухканального моноимпульсного углового измерения
Потенциальная точность двухканального углового измерения, как и одноканального, определяется шумами и особенностями вторичного излучения цели. Наибольший интерес при этом представляет сравнительный анализ двухканальных и одноканальных систем по степени влияния этих факторов на точность измерения.
Оценим ошибку углового измерения двухканальной системы, вызываемую шумами. Анализ проведем для антенной системы (рис.2.70) в виде двух сомкнутых излучателей с общей апертурой 2d, полагая, что отклонение направления на цель θ от осевого направления антенной системы мало, а величина θ определяется путем измерения разности фаз φ1-φ2 принимаемых колебаний.
В рассматриваемом случае выражение преобразуется к виду
![]()
За
счет влияния налагающихся на сигнал
шумов фаза результирующего колебания
в каждом канале отличается от фазы
колебания сигнала. Считая дисперсии
отклонения фазы в обоих каналах
одинаковыми
![]() ,
дисперсию разности фаз представим
в виде
,
дисперсию разности фаз представим
в виде
![]() .
.
Тогда дисперсия и среднеквадратичная ошибка измерения угловой координаты цели будут
![]() и
и
![]()
Чтобы оценить среднеквадратичное искажение фазы шумовым колебанием σφ, рассмотрим векторную диаграмму, соответствующую окрестности пика импульса и иллюстрирующую наложение шумового колебания на сигнал одного из каналов (рис. 2.71).
Пусть
на колебание сигнала, описываемое
выражением q
cos
ωt,
накладывается колебание помехи ξcos
ωt
+ ηsin
ωt,
причем
![]() .
В этом случае величина q
имеет
смысл отношения сигнал/шум; при измерении
фазы после оптимальной обработки
значение этой величины будет
.
В этом случае величина q
имеет
смысл отношения сигнал/шум; при измерении
фазы после оптимальной обработки
значение этой величины будет
![]() .
Из векторной диаграммы следует, что
вызванное шумом отклонение фазы δφ при
q
» 1 определяется величиной
.
Из векторной диаграммы следует, что
вызванное шумом отклонение фазы δφ при
q
» 1 определяется величиной
![]() ,
его дисперсия равна
,
его дисперсия равна
![]() ,
а среднеквадратичное значение
,
а среднеквадратичное значение
![]() .
.
Таким образом, окончательно имеем
![]() .
.
Анализируя полученные результаты, убеждаемся, что двухканальные и одноканалъные системы пеленгации с одинаковыми относительными размерами раскрыва антенн имеют практически одинаковые ошибки, вызываемые действием шумов.
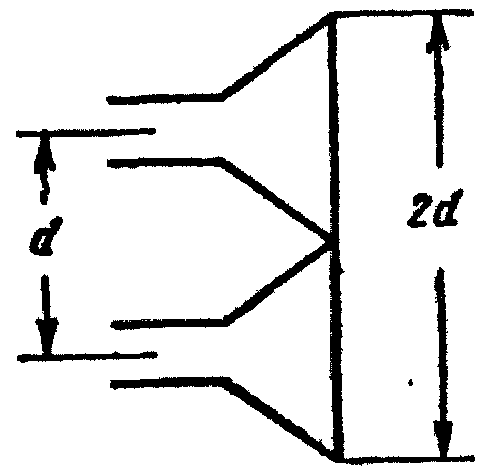
Рис. 2.70. К сравнению одноканальных и
двухканальных систем
пеленгации

Рис. 2.71. К расчету шумовой ошибки
измерения угловой координаты
Наряду с шумами на величину ошибки измерения угловой координаты влияют особенности вторичного излучения цели. Если амплитудные флюктуации сигнала в двухканальных системах не сказываются, то к ошибкам могут вести флюктуации угла прихода («угловой шум») из-за несферичности фазового фронта отраженной волны.
К сказанному следует добавить, что сам по себе полураскрыв антенной системы d еще не является единственной мерой степени сложности ее реализации. В частности, в случае неподвижных антенных систем его можно особенно просто увеличить, переходя к базовой системе с парой сравнительно малых антенн на краях базы.
В случае если b » d, получим
![]() .
.
При этом разрешающая способность по угловой координате не увеличивается, что снижает эффективность использования подобных систем в обычной активной радиолокации с пассивным ответом. Однако в случае радиолокации с активным ответом, когда вместо угловой избирательности может использоваться избирательность по форме ответного сигнала, подобные системы могут широко использоваться в целях повышения точности измерения угловой координаты.
Для расширения рабочего сектора наряду с двухантенными измерительными однобазовыми системами могут использоваться четырехантенные системы с двумя взаимно перпендикулярными базами. Подобные системы измерения угловых координат могут использоваться в радиолокационных системах с активным ответом как при импульсном, так и при непрерывном ответном излучении.