

3.6. Сглаживание экспериментальных данных с ошибками
Если некоторый набор экспериментальных данных содержит случайные отклонения, а зависимость ( ) задана значениями ftдля равноотстоящих абсцисс , то по ряду можно уточнить значения ординат, т.е. провести сглаживание зависимости ( ).Сглаженные ординаты записываются в виде φi.
Л инейное
сглаживание для пточек
по трем ординатам проводится с
помощью формул:
инейное
сглаживание для пточек
по трем ординатам проводится с
помощью формул:

(3.26)


Линейное сглаживание по пяти ординатам проводится по формулам:



(3.27)


 .
.
Для функций ƒi (xi), сильно отличающихся от линейных, используется нелинейное сглаживание с помощью полиномов высоких степеней m. При m= 3 необходимое число координат составляет семь. Сглаживание при семи ординатах производится по формуле:
φi = (a1ƒi-3 + a2 ƒi-2+ a3 ƒi-1 + a4 ƒi + a5 ƒi+1 +a6 ƒi+1 +a7 ƒi+3)/42, (3.28)
где коэффициенты a1 - a7берутся из табл. 3.2 в зависимости от номера ординаты.
Таблица 3.2. Коэффициенты формулы (3.28)
i |
a1 |
a2 |
a3 |
a4 |
a5 |
a6 |
a7 |
0 |
39 |
8 |
-4 |
-4 |
2 |
4 |
-2 |
1 |
8 |
19 |
16 |
6 |
-4 |
-7 |
4 |
2 |
-4 |
16 |
19 |
12 |
2 |
-4 |
1 |
3 |
-4 |
6 |
12 |
14 |
12 |
6 |
-4 |
4
|
-4
|
6
|
12
|
14
|
12
|
6
|
-4
|
n-2 |
1 |
-4 |
2 |
12 |
19 |
16 |
-4 |
n-1 |
4 |
-7 |
-4 |
6 |
16 |
19 |
8 |
n |
-2 |
4 |
1 |
-4 |
-4 |
8 |
3 |
Глава 4 Определенные интегралы
4.1. Классификация методов
Ставится задача вычислить интеграл вида
b
J = ∫ƒ(x)dx, (4.1)
a
где aи b— нижний и верхний пределы интегрирования; ƒ(x) — непрерывная функция на отрезке [а, b].
К численному интегрированию обращаются, когда нельзя через элементарные функции аналитически записать первообразную интеграла (4.1) или когда подобная запись имеет сложный вид.
Сущность большинства методов вычисления определенных интегралов состоит в замене подынтегральной функции ƒ(x)аппроксимирующей функцией φ(x), для которой можно легко записать первообразную в элементарных функциях, т.е.
b b
∫ƒ(x)dx = ∫φ(x)dx + R = S + R, (4.2)
а а
где S— приближенное значение интеграла; R— погрешность вычисления интеграла.
Используемые на практике методы численного интегрирования можно сгруппировать в зависимости от способа аппроксимации подынтегральной функции. Дадим краткую характеристику групп наиболее распространенных методов.
Методы Ньютона-Котеса основаны на полиномиальной аппроксимации подынтегральной функции. Методы этого класса отличаются друг от друга степенью используемого полинома, от которой зависит количество узлов, где необходимо вычислить функцию ƒ(x). Алгоритмы методов просты и легко поддаются программной реализации.
Сплайновые методы базируются на аппроксимации подынтегральной функции сплайнами, представляющими собой кусочный полином.
Методы различаются по типу выбранных сплайнов. Такие методы имеет смысл использовать в задачах, где алгоритмы сплайновой аппроксимации применяются для обработки данных.
В методах наивысшей алгебраической точности (методы Гаусса-Кристоффеля и др.) используют неравноотстоящие узлы, расположенные по алгоритму, обеспечивающему минимальную погрешность интегрирования для наиболее сложных функций при заданном количестве узлов. Методы различаются способами выбора узлов и широко используются для интегрирования, в том числе они применимы и для несобственных интегралов. Хотя из-за необходимости хранения числовых констант и стандартизации пределов интегрирования программы указанных методов требуют несколько большего объема памяти по сравнению с методами Ньютона-Котеса.
В методах Монте-Карло узлы выбираются с помощью датчика случайных чисел, ответ носит вероятностный характер. Методы оказываются эффективными при вычислении интегралов большой кратности.
В класс специальных группируются методы, алгоритмы которых разрабатываются на основе учета особенностей конкретных подынтегральных функций, что позволяет существенно сократить время и уменьшить погрешность вычисления интегралов.
Независимо от выбранного метода в процессе численного интегрирования необходимо вычислить приближенное значение Sинтеграла и оценить погрешность R (4.2). Погрешность будет уменьшаться при увеличении количества разбиений N интервала интегрирования [а, b]за счет более точной аппроксимации подынтегральной функции, однако при этом будет возрастать погрешность за счет суммирования частичных интегралов, и последняя погрешность с некоторого значения No становится преобладающей (рис. 4.1) [1,16].
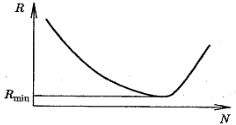
Рис. 4.1. Зависимость полной погрешности Rот количества разбиений N интервала интегрирования
Это обстоятельство должно предостеречь от выбора чрезмерно большого числа N и привести к необходимости разработки способа оценки погрешности Rвыбранного метода интегрирования.