

11.3. Прямые методы оценки качества управления
Устойчивость САУ является необходимым, но не достаточным условием для ее эффективного функционирования. Важное значение имеет качество управления, то есть степень удовлетворения совокупности требований к форме кривой переходного процесса, которая определяет пригодность системы для конкретных условий работы.
Для сравнения качества различных САУ исследуется их реакция на типовые воздействия. Обычно это ступенчатая (толчковая) функция, как один из наиболее неблагоприятных видов возмущений. Для систем, работающих с периодическими возмущениями, целесообразно оценивать качество управления при гармоническом воздействии. Все остальные возмущения можно разложить на ступенчатые воздействия с использованием интеграла Дюамеля, либо в ряд Фурье.
Все современные методы анализа качества управления можно разделить на прямые методы анализа по кривой переходного процесса или по частотным характеристикам, и косвенные методы, позволяющие, не решая дифференциального уравнения, определить некоторые показатели качества процесса управления; к ним, в частности, относятся корневые, интегральные и частотные методы.
11.3.1. Оценка переходного процесса при ступенчатом воздействии.
Пусть САР (рис.84) при t = 0 воздействует возмущающий фактор f в виде единичной ступенчатой функции. При нулевых начальных условиях динамический режим описывается переходной характеристикой h(t) = y(t) = y(t) - y0 = -e(t) (рис.85). По ней можно определить все наиболее важные показатели качества управления.

1. Статическая ошибка eуст = y0 - yуст = -hуст - это разность между предписанным и действительным значением управляемой величины в установившемся режиме. Для статических систем статическая ошибка отлична от нуля (рис.85а) и пропорциональна величине возмущающего фактора f (в линейных САУ) и коэффициенту передачи системы по данному возмущению, а для астатических - равна нулю (рис.85б).
2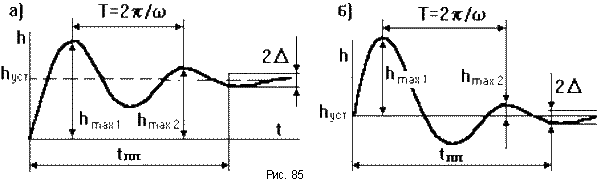 .
Время
переходного процесса
tпп
- это время от момента воздействия,
начиная с которого колебания управляемой
величины не превышают некоторого наперед
заданного значения, то есть
|h(t)-hуст|
.
Обычно принимают
=
0.05hуст.
.
Время
переходного процесса
tпп
- это время от момента воздействия,
начиная с которого колебания управляемой
величины не превышают некоторого наперед
заданного значения, то есть
|h(t)-hуст|
.
Обычно принимают
=
0.05hуст.
3.
Перерегулирование
s
- это максимальное отклонение управляемой
величины от установившегося значения,
выраженное в относительных единицах:
![]() .
Здесь hmax1
- значение первого максимума переходной
характеристики. При больших
перерегулированиях могут возникнуть
значительные динамические усилия в
механической части системы, электрические
перенапряжения и т.п. Допустимое значение
s
определяется
из опыта эксплуатации. обычно оно
составляет 0.1...0.3, иногда допускается
до 0.7.
.
Здесь hmax1
- значение первого максимума переходной
характеристики. При больших
перерегулированиях могут возникнуть
значительные динамические усилия в
механической части системы, электрические
перенапряжения и т.п. Допустимое значение
s
определяется
из опыта эксплуатации. обычно оно
составляет 0.1...0.3, иногда допускается
до 0.7.
4. Частота колебаний = 2 /T, где T - период колебаний.
5. Число колебаний n за время tпп.
6. Декремент затухания k, равный отношению двух смежных перерегулирований:
 .
.
При
создании САУ допустимые значения
показателей качества оговариваются
техническими услов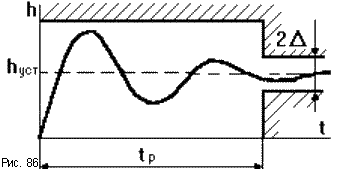 иями,
что можно представить в виде диаграммы
показателей качества.
Это область, за границы которой не должна
выходить переходная характеристика
(рис.86).
иями,
что можно представить в виде диаграммы
показателей качества.
Это область, за границы которой не должна
выходить переходная характеристика
(рис.86).
11.3.2. Оценка качества управления при периодических возмущениях
Периодические возмущения можно разложить в ряд Фурье, поэтому их воздействие удобно анализировать по частотным характеристикам, показывающим, как звено преобразует гармонический сигнал.

Обычно используют АЧХ замкнутой САУ (рис.87), которую легко построить по АФЧХ разомкнутой САУ Wp(j ), по формуле
Aз
=
 .
.
По этой кривой можно получить ряд показателей качества.
1. Показатель колебательности M - это отношение максимального значения АЧХ замкнутой САУ к ее значению при = 0, то есть M = Aзmax( )/Aз(0). Так как
Aз(0)
=
 1,
1,
при Kp >> 1, то M Aзmax( ). Он характеризует склонность системы к колебаниям и не должен превышать 1.5.
2. Резонансная частота системы p - это частота, при которой колебания проходят через систему с наибольшим усилением, а АЧХ достигает максимума.
3.
Полоса
пропускания системы -
это интервал частот от
=
0 до
=
0,
на котором выполняется условие Aз(
0)
![]() 0.707.
Если она высокая, то система будет
воспроизводить высокочастотные помехи.
0.707.
Если она высокая, то система будет
воспроизводить высокочастотные помехи.
4. Частота среза ср - при которой АЧХ замкнутой САУ принимает значение, равное единице. По ней можно судить о длительности переходного процесса tпп (1..2)2 / ср.
5. Склонность САУ к колебаниям характеризуют также ее запасы устойчивости по модулю (допускается от 6 до 20дб) и по фазе (допускается от 30 до 60 градусов).